地铁转向架构架定位设备及定位方法与流程
本发明属于转向架定位,更具体地说,是涉及一种地铁转向架构架定位设备及定位方法。
背景技术:
1、作为轨道车辆结构中最为重要的部件,转向架能够承受并传递从车体至车轮之间或从轮轨至车体之间的各种载荷及作用力,并使轴重均匀分配,使车辆能灵活地沿直线线路运行及顺利地通过曲线,并使车辆具有良好的减振特性,以缓和车辆和线路之间的相互作用,提高车辆运行平稳性和安全性。
2、现有技术中,转向架构架在进行机加工时,一般仅对重要部件进行夹紧限位,需要通过变换夹紧件的位置以适配于不同规格构架的横梁、侧梁等构件的尺寸,定位效率低,且定位精度差。
技术实现思路
1、本发明的目的在于提供一种地铁转向架构架定位设备及定位方法,能够实现地铁转向架构架的快速找正和调平,提高了定位效率,保证了定位精度。
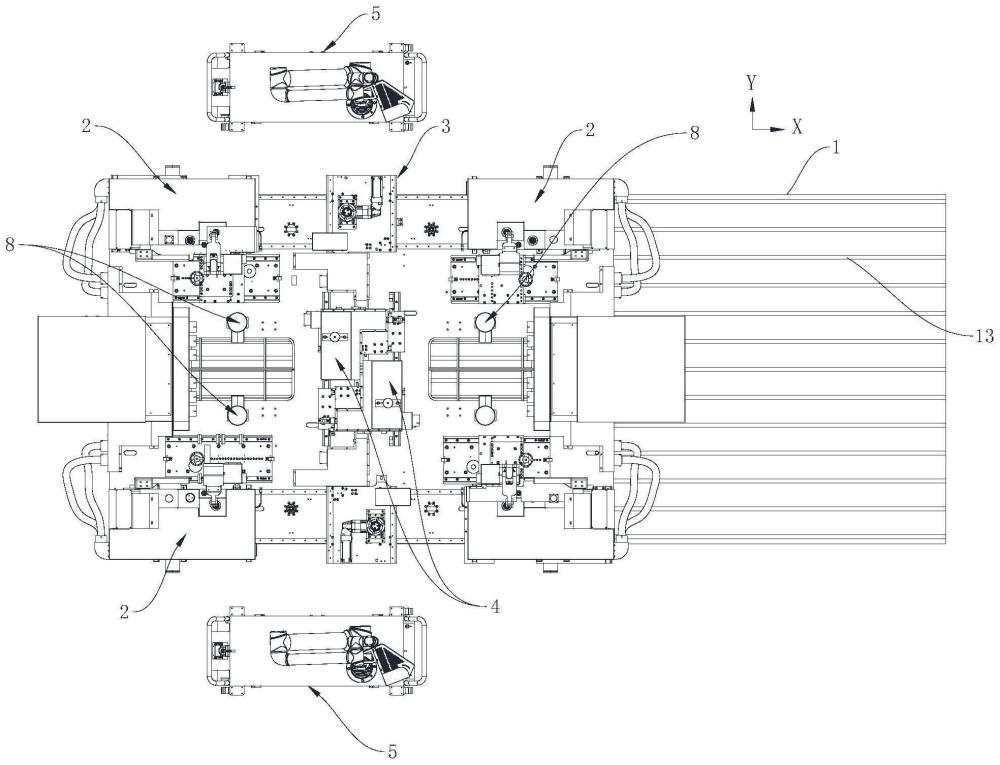
2、为实现上述目的,本发明采用的技术方案是:提供一种地铁转向架构架定位设备,包括承托平台、四组四角调平找正模组、两组侧梁调平支撑模组,横梁支撑模组以及两组机器人找正机构,承托平台沿x向延伸,承托平台的上方连接有工装底板;四组四角调平找正模组分别连接于工装底板的四角位置,用于调平并找正构架的侧梁端部;两组侧梁调平支撑模组分别连接于工装底板上,且分别靠近工装底板的两侧设置、用于支撑并调平侧梁;横梁支撑模组设置于两个侧梁调平支撑模组之间,用于支撑于构架的横梁的下方;两组机器人找正机构分别设置于承托平台的两侧,用于监测构架的位置参数。
3、在一种可能的实现方式中,四角调平找正模组的底部通过平移调节模组连接于工装底板上,平移调节模组包括第一x向底板以及第一y向底板,第一x向底板沿x向滑动连接于工装底板上,第一x向底板与工装底板之间通过x向推动件相连;第一y向底板沿y向滑动连接于第一x向底板上,第一y向底板与第一x向底板之间通过y向推动件相连,四角调平找正模组设置于第一y向底板上。
4、一些实施例中,x向推动件沿x向连接于工装底板的外侧,x向推动件具有与第一x向底板的底面相连以驱动第一x向底板水平移动的第一驱动端;
5、y向推动件设置于第一y向底板的上方,y向推动件具有与第一x向底板的侧缘相连以驱动第一y向底板水平移动的第二驱动端。
6、在一种可能的实现方式中,四角调平找正模组包括内推移块、端部顶块、顶升支撑底座以及内侧压紧件,内推移块设置于第一y向底板上,且位于第一y向底板远离x向推动件的一侧,内推移块用于与侧梁的内侧壁抵接以x向推动构架;端部顶块设置于第一y向底板上,用于与侧梁的端面抵接以y向推动构架移动;顶升支撑底座设置于第一y向底板上、且承托于侧梁的端部下方、用于带动构架上下移动;内侧压紧件设置工装底板上,内侧压紧件沿上下方向滑动连接有用于抵压于侧梁顶面的下压臂。
7、一些实施例中,内侧压紧件与顶升支撑底座相邻设置,下压臂沿y向延伸至侧梁的上方,内侧压紧件沿x向滑动连接于工装底板上,下压臂的外伸端转动连接有与侧梁顶面抵接配合的下压座。
8、在一种可能的实现方式中,侧梁调平支撑模组包括x向滑移底板以及顶升座,x向滑移底板沿x向滑动连接于工装底板上;顶升座连接于x向滑移底板的上方、顶升座具有能够升降移动以顶撑于侧梁下方的顶升端。
9、一些实施例中,横梁支撑模组包括两个第二y向底板、两个第二x向底板以及两个横梁升降支撑座,两个第二y向底板分别沿y向滑动连接于工装底板上、且沿y向间隔设置,第二y向底板与工装底板之间通过y向延伸的丝杠驱动组件相连;两个第二x向底板分别一一对应沿x向滑动连接于两个第二y向底板上、且沿y向间隔设置,第二x向底板与第二y向底板之间通过x向伸缩推动件相连;两个横梁升降支撑座分别一一对应设置于第二x向底板上、且分别靠近第二y向底板的对角位置设置,横梁升降支撑座具有能够上下移动、并承托于横梁的下方的支撑部。
10、在一种可能的实现方式中,地铁转向架构架定位设备还包括两个分别靠近工装底板的对角设置、且位于四个四角调平找正模组之间的齿轮箱安装座支撑模组,齿轮箱安装座支撑模组包括顶升液压缸、压力传感器以及承托盘,顶升液压缸连接于工装底板上、且对应位于四角调平找正模组的内侧,顶升液压缸具有向上的驱动端;压力传感器设置于顶升液压缸的驱动端;承托盘设置于传感器的上方、且用于承托齿轮箱安装座;
11、其中,压力传感器用于监测承托盘承受的下压力参数,并输送下压力参数至机器人找正机构。
12、在一种可能的实现方式中,机器人找正机构包括移动小车,六轴机器人,视觉相机以及控制系统,移动小车设置于承托平台的侧部;六轴机器人设置于移动小车上;视觉相机连接于六轴机器人的操作端、用于采集构架的位置参数;控制系统与六轴机器人电连接、用于发送动作指令至六轴机器人,控制系统与视觉相机电连接、用于接收视觉相机发送的位置参数。
13、本发明还提供了一种地铁转向架构架定位方法,地铁转向架构架定位方法包括以下步骤:
14、s100:预设构架的标准中心坐标、横梁的第一标准坐标和侧梁的第二标准坐标;
15、s200:启动机器人找正机构,利用四角调平找正模组对构件进行x向和y向的水平推移、结合对构架的周向旋转驱动以实现水平找正;
16、s300:利用四角调平找正模组的上下移动以实现构架的升降调节,使构架的实际中心坐标与标准中心坐标重合,使横梁的第一实际坐标与第一标准坐标重合,并使横梁的第二实际坐标与第二标准坐标重合;
17、s400:利用六轴机器人带动视觉相机对构架进行多角度拍照,通过控制系统判定后,进行构架的二次找正;
18、s500:二次找正结束后,六轴机器人带动视觉相机对构架进行拍照复检,误差满足预设区间,判定构架的定位合格,对构架的横梁以及侧梁进行压紧限位,完成构架定位。
19、本申请实施例所示的方案,与现有技术相比,本申请实施例提供的地铁转向架构架定位设备,承托平台上的工装底板用于安装上部构件,四角调平找正模组可对构架两个侧梁的端部分别进行调平和找正,侧梁调平支撑模组用于支撑于侧梁的中部下方,横梁支撑模组对横梁的中部进行承托,调平找正过程中利用两组机器人找正机构分别对构架两侧的位置参数进行监测,进而对构架进行位置调节,使其位置满足预设要求,最终使构架得到准确定位,便于保证后续的加工精度,进而保证了构架的加工质量。
技术特征:
1.地铁转向架构架定位设备,其特征在于,包括承托平台(1)、四组四角调平找正模组(2)、两组侧梁调平支撑模组(3),横梁支撑模组(4)以及两组机器人找正机构(5),承托平台(1)沿x向延伸,所述承托平台(1)的上方连接有工装底板(11);四组四角调平找正模组(2)分别连接于所述工装底板(11)的四角位置,用于调平并找正构架(9)的侧梁(92)端部;两组侧梁调平支撑模组(3)分别连接于所述工装底板(11)上,且分别靠近所述工装底板(11)的两侧设置、用于支撑并调平所述侧梁(92);横梁支撑模组(4)设置于两个所述侧梁调平支撑模组(3)之间,用于支撑于构架(9)的横梁(91)的下方;两组机器人找正机构(5)分别设置于所述承托平台(1)的两侧,用于监测所述构架(9)的位置参数。
2.如权利要求1所述的地铁转向架构架定位设备,其特征在于,所述四角调平找正模组(2)的底部通过平移调节模组(6)连接于所述工装底板(11)上,所述平移调节模组(6)包括第一x向底板(61)以及第一y向底板(62),第一x向底板(61)沿x向滑动连接于所述工装底板(11)上,所述第一x向底板(61)与工装底板(11)之间通过x向推动件(63)相连;第一y向底板(62)沿y向滑动连接于所述第一x向底板(61)上,所述第一y向底板(62)与所述第一x向底板(61)之间通过y向推动件(64)相连,所述四角调平找正模组(2)设置于所述第一y向底板(62)上。
3.如权利要求2所述的地铁转向架构架定位设备,其特征在于,所述x向推动件(63)沿x向连接于所述工装底板(11)的外侧,所述x向推动件(63)具有与所述第一x向底板(61)的底面相连以驱动所述第一x向底板(61)水平移动的第一驱动端;
4.如权利要求2所述的地铁转向架构架定位设备,其特征在于,所述四角调平找正模组(2)包括内推移块(21)、端部顶块(22)、顶升支撑底座(23)以及内侧压紧件(24),内推移块(21)设置于所述第一y向底板(62)上,且位于所述第一y向底板(62)远离所述x向推动件(63)的一侧,所述内推移块(21)用于与所述侧梁(92)的内侧壁抵接以x向推动所述构架(9);端部顶块(22)设置于所述第一y向底板(62)上,用于与所述侧梁(92)的端面抵接以y向推动构架(9)移动;顶升支撑底座(23)设置于所述第一y向底板(62)上、且承托于所述侧梁(92)的端部下方、用于带动所述构架(9)上下移动;内侧压紧件(24)设置工装底板(11)上,所述内侧压紧件(24)沿上下方向滑动连接有用于抵压于所述侧梁(92)顶面的下压臂(25)。
5.如权利要求4所述的地铁转向架构架定位设备,其特征在于,所述内侧压紧件(24)与所述顶升支撑底座(23)相邻设置,所述下压臂(25)沿y向延伸至所述侧梁(92)的上方,所述内侧压紧件(24)沿x向滑动连接于所述工装底板(11)上,所述下压臂(25)的外伸端转动连接有与所述侧梁(92)顶面抵接配合的下压座(26)。
6.如权利要求1-5中任一项所述的地铁转向架构架定位设备,其特征在于,所述侧梁调平支撑模组(3)包括x向滑移底板(31)以及顶升座(32),x向滑移底板(31)沿x向滑动连接于所述工装底板(11)上;顶升座(32)连接于所述x向滑移底板(31)的上方、所述顶升座(32)具有能够升降移动以顶撑于所述侧梁(92)下方的顶升端。
7.如权利要求1-5中任一项所述的地铁转向架构架定位设备,其特征在于,所述横梁支撑模组(4)包括两个第二y向底板(41)、两个第二x向底板(42)以及两个横梁升降支撑座(43),两个第二y向底板(41)分别沿y向滑动连接于所述工装底板(11)上、且沿y向间隔设置,所述第二y向底板(41)与所述工装底板(11)之间通过y向延伸的丝杠驱动组件(44)相连;两个第二x向底板(42)分别一一对应沿x向滑动连接于两个所述第二y向底板(41)上、且沿y向间隔设置,所述第二x向底板(42)与所述第二y向底板(41)之间通过x向伸缩推动件(45)相连;两个横梁升降支撑座(43)分别一一对应设置于所述第二x向底板(42)上、且分别靠近所述第二y向底板(41)的对角位置设置,所述横梁升降支撑座(43)具有能够上下移动、并承托于所述横梁(91)的下方的支撑部(46)。
8.如权利要求1-5中任一项所述的地铁转向架构架定位设备,其特征在于,所述地铁转向架构架定位设备还包括两个分别靠近所述工装底板(11)的对角设置、且位于四个所述四角调平找正模组(2)之间的齿轮箱安装座支撑模组(8),所述齿轮箱安装座支撑模组(8)包括顶升液压缸(81)、压力传感器(82)以及承托盘(83),顶升液压缸(81)连接于所述工装底板(11)上、且对应位于所述四角调平找正模组(2)的内侧,所述顶升液压缸(81)具有向上的驱动端;压力传感器(82)设置于所述顶升液压缸(81)的驱动端;承托盘(83)设置于所述传感器的上方、且用于承托齿轮箱安装座(71);
9.如权利要求1-5中任一项所述的地铁转向架构架定位设备,其特征在于,所述机器人找正机构(5)包括移动小车(51),六轴机器人(52),视觉相机(53)以及控制系统,移动小车(51)设置于所述承托平台(1)的侧部;六轴机器人(52)设置于所述移动小车(51)上;视觉相机(53)连接于所述六轴机器人(52)的操作端、用于采集所述构架(9)的位置参数;控制系统与所述六轴机器人(52)电连接、用于发送动作指令至所述六轴机器人(52),所述控制系统与所述视觉相机(53)电连接、用于接收所述视觉相机(53)发送的所述位置参数。
10.一种地铁转向架构架定位方法,其特征在于,所述地铁转向架构架定位方法包括以下步骤:
技术总结
本发明提供了一种地铁转向架构架定位设备及定位方法,包括承托平台、四角调平找正模组、侧梁调平支撑模组、横梁支撑模组及机器人找正机构,承托平台上方连接有工装底板;四角调平找正模组连接于工装底板的四角位置;侧梁调平支撑模组连接于工装上;横梁支撑模组设置于两个侧梁调平支撑模组之间。本发明提供的地铁转向架构架定位设备,四角调平找正模组可对构架两个侧梁的端部分别进行调平和找正,侧梁调平支撑模组用于支撑于侧梁的中部下方,横梁支撑模组对横梁的中部进行承托,调平找正过程中利用两组机器人找正机构分别对构架两侧的位置参数进行监测,进而对构架进行位置调节,最终使构架得到准确定位,便于保证后续的机加工精度。
技术研发人员:厉永泽,刘景才,田宝国,连满义,么永光,赵晨光,陈月杰,姚金刚,相树英,郑建科
受保护的技术使用者:中车唐山机车车辆有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!