确定机器人拣选货物位置的方法及装置、机器人系统与流程
本技术涉及物流拣选,更具体而言,涉及一种确定机器人拣选货物位置的方法、确定机器人拣选货物位置的装置和机器人系统。
背景技术:
1、拣选者和机器人配合完成拣选是目前仓库的常用拣选方式,在拣选者和机器人接触的时候,拣选者会手动输入身份信息到机器人中,以启动执行并进行身份认证,从而记录下完成启动执行的标识信息,便于后续在出问题的时候根据记录的信息完成追责。例如在口红a被拆开后,可根据记录的信息追溯到口红a的拣选者。但是手动输入身份信息的过程需要一定的时间,当货物拣选位置点的数量增加时,会导致输入身份信息所耗费的时间较多,从而影响启动执行的标识信息验证的效率。
技术实现思路
1、本技术实施例提供一种确定机器人拣选货物位置的方法、确定机器人拣选货物位置的装置和机器人系统,利用各个机器人上一次身份认证时的位置来确定各个最近拣选者的位置和当前拣选区域,以准确地预估机器人在下一个货物拣选位置点遇到的拣选者,从而提高拣选者身份认证的效率。
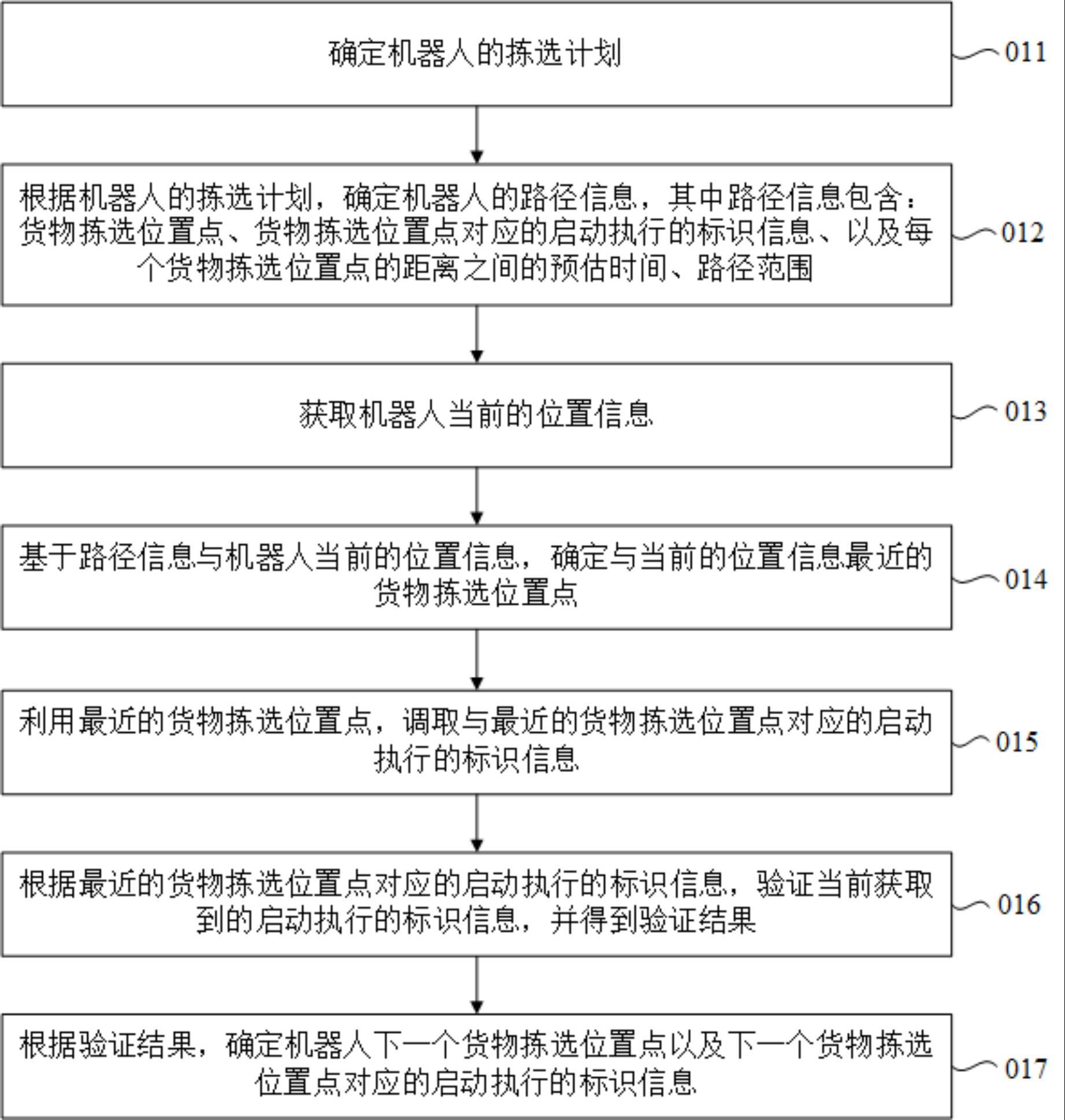
2、本技术实施例的确定机器人拣选货物位置的方法包括确定机器人的拣选计划;根据所述机器人的拣选计划,确定所述机器人的路径信息,其中所述路径信息包含:货物拣选位置点、货物拣选位置点对应的启动执行的标识信息、以及每个货物拣选位置点的距离之间的预估时间、路径范围;获取所述机器人当前的位置信息;基于所述路径信息与所述机器人当前的位置信息,确定与所述当前的位置信息最近的货物拣选位置点;利用所述最近的货物拣选位置点,调取与所述最近的货物拣选位置点对应的启动执行的标识信息;根据所述最近的货物拣选位置点对应的启动执行的标识信息,验证当前获取到的启动执行的标识信息,并得到验证结果;根据所述验证结果,确定所述机器人下一个货物拣选位置点以及所述下一个货物拣选位置点对应的启动执行的标识信息。
3、在某些实施例中,根据所述机器人的拣选计划,确定所述机器人的路径信息包括:根据所述机器人的拣选计划,获取机器人的物理操作空间信息,其中,所述物理操作空间信息至少包含货物区域信息、拣货区域信息及行动空间区域信息;根据预设模拟算法,对所述物理操作空间信息进行整理;根据所述整理结果,标注所述物理操作空间信息内所包含的各种信息;通过对所述物理操作空间信息内所包含的各种信息的标注,确定所述机器人的路径信息。
4、在某些实施例中,所述基于所述路径信息与所述机器人当前的位置信息,确定与所述当前的位置信息最近的货物拣选位置点,包括:根据所述拣选计划,确定所述机器人的货物拣选位置点对应的启动执行信息,与触发所述启动执行信息对应的时间节点;根据所述启动执行信息与所述时间节点,计算出所述机器人的预设执行到货物拣选位置点;通过所述预设执行到货物拣选位置点与所述每个货物拣选位置点的距离之间的预估时间,确定出最近待执行到货物拣选位置点;根据所述机器人当前的位置信息与所述最近待执行到货物拣选位置点,确定与所述当前的位置信息最近的货物拣选位置点。
5、在某些实施例中,根据所述最近的货物拣选位置点对应的启动执行的标识信息,验证当前获取到的启动执行的标识信息包括:根据所述机器人的拣选计划与所述最近的货物拣选位置点对应的启动执行的标识信息,确定所述机器人的最近待执行到货物拣选位置点对应的启动执行的标识信息;根据所述机器人的当前位置信息,判断所述当前位置信息是否在所述路径范围内;当在所述路径范围内时,验证所述当前位置信息是否与所述机器人的最近待执行到货物拣选位置点相匹配;当匹配时,验证结果是所述机器人的最近待执行到货物拣选位置点对应的启动执行的标识信息,为所述机器人的当前位置信息对应的启动执行的标识信息;当不匹配时,验证结果是根据所述机器人的路径信息,更新所述最近的货物拣选位置点对应的启动执行的标识信息为所述当前获取到的启动执行的标识信息。
6、在某些实施例中,所述验证所述当前位置信息是否与所述机器人的最近待执行到货物拣选位置点相匹配,还包括:在确定所述机器人到最近的货物拣选位置点时,根据所述最近的货物拣选位置点对应的启动执行的标识信息,显示对应的拣选者的身份验证界面;在获取到所述身份验证界面输入的确认指令的情况下,确定验证所述当前位置信息与所述机器人的最近待执行到货物拣选位置点相匹配。
7、在某些实施例中,所述根据所述验证结果,确定所述机器人下一个货物拣选位置点以及所述下一个货物拣选位置点对应的启动执行的标识信息包括:根据所述验证结果,建立多个预设时间段对应的所述启动执行的标识信息的位置分布;根据所述位置分布,训练得到表征所述启动执行的标识信息和所述机器人在各个所述预设时间段的交互匹配度模型;根据所述交互匹配度模型,确定所述机器人的所述下一个货物拣选位置点对应的启动执行的标识信息。
8、在某些实施例中,所述方法还包括在所述机器人到达所述下一个货物拣选位置点时,根据交互匹配度模型确定的所述机器人的所述下一个货物拣选位置点对应的启动执行的标识信息,显示对应拣选者的身份验证界面。
9、在某些实施例中,所述方法还包括根据预设的订单任务,确定所述机器人的所述拣选计划,所述拣选计划至少对应一个所述订单任务;根据所述机器人的各个所述货物拣选位置点对应的所述订单任务及所述启动执行的标识信息,建立拣选者和订单任务的映射表。
10、本技术实施例的确定机器人拣选货物位置的装置包括第一确定模块、第二确定模块、获取模块、第三确定模块、调取模块、验证模块及第四确定模块。所述第一确定模块用于确定机器人的拣选计划。所述第二确定模块用于根据所述机器人的拣选计划,确定所述机器人的路径信息,其中所述路径信息包含:货物拣选位置点、货物拣选位置点对应的启动执行的标识信息、以及每个货物拣选位置点的距离之间的预估时间、路径范围。所述获取模块用于获取所述机器人当前的位置信息。所述第三确定模块用于基于所述路径信息与所述机器人当前的位置信息,确定与所述当前的位置信息最近的货物拣选位置点。所述调取模块,用于利用所述最近的货物拣选位置点,调取与所述最近的货物拣选位置点对应的启动执行的标识信息。所述验证模块用于根据所述最近的货物拣选位置点对应的启动执行的标识信息,验证当前获取到的启动执行的标识信息,并得到验证结果。所述第四确定模块用于根据所述验证结果,确定所述机器人下一个货物拣选位置点以及所述下一个货物拣选位置点对应的启动执行的标识信息。
11、本技术实施例的机器人系统包括机器人、处理器、存储器及计算机程序,其中,所述计算机程序被存储在所述存储器中,并且被所述处理器执行,所述计算机程序包括用于执行上述任一实施例所述的第一种确定机器人拣选货物位置的方法的指令。
12、本技术实施例的确定机器人拣选货物位置的方法、确定机器人拣选货物位置的装置和机器人系统,首先确定机器人的拣选计划,以确定机器人的路径信息,从而确定机器人对应的货物拣选位置点、货物拣选位置点对应的启动执行的标识信息、以及每个货物拣选位置点的距离之间的预估时间、路径范围。然后,处理器可获取机器人当前的位置信息,以便于结合路径信息来确定最近的货物拣选位置点,即确定机器人下一个货物拣选位置点。每个货物拣选位置点都需要有拣选者来启动执行,并且处理器还会记录在每个货物拣选位置点完成启动执行的情况下,每个货物拣选位置点所对应的启动执行的标识信息。因此处理器还会调取最近的货物拣选位置点对应的启动执行的标识信息,以预估机器人移动到最近的货物拣选位置点时,所遇到的拣选者的信息。接着,在机器人到达最近的货物拣选位置点的情况下,处理器可根据上述确认的最近的货物拣选位置点对应的启动执行的标识信息,对当前获取到的启动执行的标识信息来进行验证,即验证启动执行的拣选者是否为预估的拣选者。在得到验证结果后,处理器可根据验证结果获取到当前在每个货物拣选位置点完成启动执行的拣选者的信息,即获取到当前在每个货物拣选位置点对应的启动执行的标识信息。接着,处理器便可根据验证结果和拣选计划,来确定机器人的下一个货物拣选位置点,以及下一个货物拣选位置点对应的启动执行的标识信息,并在机器人到达下一个货物拣选位置点的情况下,根据对应的启动执行的标识信息来进行拣选者的身份认证。可以理解,相对于每次都需要手动输入身份信息进行身份认证而言,本技术的机器人每到达一个货物拣选位置点就根据预估的拣选者显示验证信息,若当前拣选者确实是预估的拣选者,当前拣选者只需要通过验证即可,而不需要手动输入身份信息。同时,本技术可基于各个机器人上一次启动执行时的位置来确定各个拣选者的位置,以确定每个货物拣选位置点对应的启动执行的标识信息,使得处理器可准确地预估机器人在下一个货物拣选位置点遇到的拣选者,即准确地预估下一个货物拣选位置点对应的启动执行的标识信息,如此便可减少身份信息输入的次数,以提高身份认证的验证效率,即提高启动执行的标识信息的验证效率。
13、本技术的实施例的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施例的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!