一种基于AR技术的有限空间救援机器人的制作方法
本发明涉及救援设备,尤其涉及一种基于ar技术的有限空间救援机器人。
背景技术:
1、目前有限空间作业导致的事故频发,在事故救援时由于有限空间内部环境复杂,有毒有害气体浓度较高,一旦发生有限空间中毒或窒息事故,采用人救人的方式进行施救,极易对救援人员造成再次伤害,不利于在有限空间采取救援措施。
技术实现思路
1、本发明的目的在于提供一种基于ar技术的有限空间救援机器人,解决了一旦发生有限空间中毒或窒息事故,采用人救人的方式进行施救,极易对救援人员造成再次伤害,不利于在有限空间采取救援措施的问题。
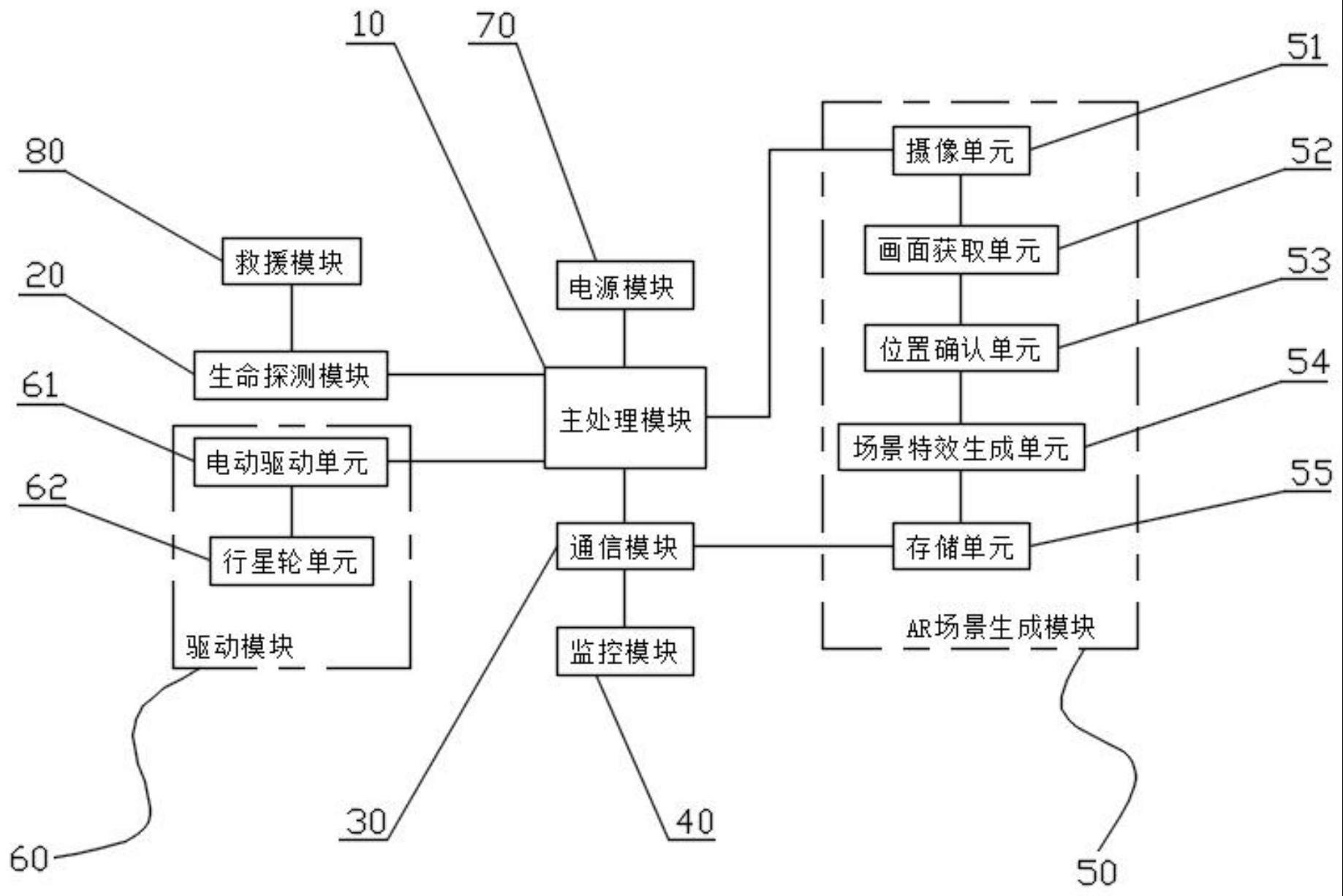
2、为实现上述目的,本发明采用的一种基于ar技术的有限空间救援机器人,包括机器人本体、主处理模块、生命探测模块、通信模块、监控模块和ar场景生成模块,所述主处理模块设置于所述机器人本体的内部,所述生命探测模块与所述主处理模块连接,所述通信模块分别与所述主处理模块和所述监控模块连接,所述ar场景生成模块与所述主处理模块连接;
3、所述ar场景生成模块包括摄像单元、画面获取单元、位置确认单元、场景特效生成单元和存储单元,所述摄像单元与所述主处理模块连接,所述画面获取单元与所述摄像单元连接,所述位置确认单元分别与所述画面获取单元和所述场景特效生成单元连接,所述存储单元分别与所述场景特效生成单元和所述通信模块连接;
4、所述生命探测模块包括红外传感器、温度传感器、振动传感器和气体传感器,用于探测生命迹象;
5、所述摄像单元用于拍摄救援场景的画面;
6、所述画面获取单元用于获取救援场景画面的数据信息;
7、所述位置确认单元用于获取当前位置的数据信息;
8、所述场景特效生成单元用于根据救援场景画面的数据信息和当前位置的数据信息生成ar场景特效,并将ar场景特效的数据进行打包处理;
9、所述存储单元用于存储ar场景特效的打包数据;
10、所述主处理模块用于接收数据,对所述机器人本体的行动作出决策,并反馈信息;
11、所述监控模块用于接收打包数据并进行解包,同时显示ar场景特效;
12、所述通信模块用于所述主处理模块和所述监控模块之间的通信处理。
13、其中,所述基于ar技术的有限空间救援机器人还包括驱动模块,所述驱动模块分别与所述主处理模块和所述机器人本体连接;
14、所述驱动模块用于接收所述主处理模块发出的决策数据,并驱动所述机器人本体移动。
15、其中,所述驱动模块包括电动驱动单元和行星轮单元,所述电动驱动单元与所述主处理模块连接,所述行星轮分别与所述电动驱动单元和所述机器人本体连接。
16、其中,所述行星轮单元用于带动所述机器人本体移动;
17、所述电动驱动单元用于接收所述主处理模块发出的决策数据,并提供所述行星轮单元运作的驱动源。
18、其中,所述基于ar技术的有限空间救援机器人还包括电源模块,所述电源模块与所述主处理模块连接。
19、其中,所述电源模块用于对所述主处理模块提供电源。
20、其中,所述基于ar技术的有限空间救援机器人还包括救援模块,所述救援模块分别与所述生命探测模块和所述主处理模块连接。
21、其中,所述救援模块用于采用救援措施,救援措施包括供氧、通风、降温。
22、本发明的一种基于ar技术的有限空间救援机器人,所述生命探测模块包括红外传感器、温度传感器、振动传感器和气体传感器,用于探测生命迹象;所述摄像单元拍摄救援场景的画面;所述画面获取单元获取救援场景画面的数据信息;所述位置确认单元获取当前位置的数据信息;所述场景特效生成单元根据救援场景画面的数据信息和当前位置的数据信息生成ar场景特效,并将ar场景特效的数据进行打包处理;所述存储单元存储ar场景特效的打包数据;所述主处理模块接收数据,对所述机器人本体的行动作出决策,并反馈信息;所述监控模块接收打包数据并进行解包,同时显示ar场景特效;所述通信模块用于所述主处理模块和所述监控模块之间的通信处理;通过ar技术,采用所述机器人本体进入有限空间内部对受伤昏迷人员进行救援,可及时有效营救被困人员,同时避免救援人员进入有限空间后受到二次伤害,获得有利于在有限空间采取救援措施的效果。
技术特征:
1.一种基于ar技术的有限空间救援机器人,包括机器人本体、主处理模块、生命探测模块、通信模块和监控模块,所述主处理模块设置于所述机器人本体的内部,所述生命探测模块与所述主处理模块连接,所述通信模块分别与所述主处理模块和所述监控模块连接,其特征在于,
2.如权利要求1所述的基于ar技术的有限空间救援机器人,其特征在于,
3.如权利要求2所述的基于ar技术的有限空间救援机器人,其特征在于,
4.如权利要求3所述的基于ar技术的有限空间救援机器人,其特征在于,
5.如权利要求1所述的基于ar技术的有限空间救援机器人,其特征在于,
6.如权利要求5所述的基于ar技术的有限空间救援机器人,其特征在于,
7.如权利要求1所述的基于ar技术的有限空间救援机器人,其特征在于,
8.如权利要求7所述的基于ar技术的有限空间救援机器人,其特征在于,
技术总结
本发明涉及救援设备技术领域,具体涉及一种基于AR技术的有限空间救援机器人;包括机器人本体、主处理模块、生命探测模块、通信模块、监控模块和AR场景生成模块;AR场景生成模块包括摄像单元、画面获取单元、位置确认单元、场景特效生成单元和存储单元;画面获取单元用于获取救援场景画面的数据信息;位置确认单元用于获取当前位置的数据信息;场景特效生成单元用于根据救援场景画面的数据信息和当前位置的数据信息生成AR场景特效;主处理模块用于接收数据,对机器人本体的行动作出决策;监控模块用于接收打包数据并进行解包,同时显示AR场景特效;通过上述方式,有利于在有限空间采取救援措施。
技术研发人员:常鹏程,薛国臣,欧中锴,孟萌萌
受保护的技术使用者:重庆市安全生产科学研究院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!