一种自适应多位置补偿的管料类工件手爪装置及方法与流程
本发明涉及一种钻杆柔性产线工业机器人的手爪,具体涉及一种自适应多位置补偿的管料类工件手爪装置及方法。
背景技术:
1、钻杆柔性产线以实现钻杆各工序智能化标准化生产为主要目标,可大幅度提高生产效率、产品质量与能源利用率。工业机器人在钻杆柔性产线中是比较重要的自动化设备,主要用于完成产线自动上下料的作业任务,而与其配套的手爪装置是工业机器人的关键部件,其性能决定了工业机器人在作业时的可靠性、稳定性和准确性程度,这就对工业机器人手爪装置提出了更高的要求。
2、首先手爪装置要能适应钻杆柔性产线中不同规格的圆形管料和三棱管料的夹取搬运;其次为提高管料的码垛数量,钻杆架上的管料尽可能地相互紧凑地去摆放,这就要求手抓装置要具有一定的位置补偿性,以适应管料的多方位夹取,以免发生刮伤和磕碰;为使管料能精准地放置在加工设备预设的位置上,夹取的管料要能在搬运过程中很好地进行定心;三棱管料由于截面形状特殊,要综合考虑截面尺寸误差,在吸附时可以进行位置补偿,要设置专用的支撑夹取装置,但不能影响圆形管料的夹取;除此之外,在夹取时要考虑系统突然发生断电断气的场景,设置可靠的锁紧机构以降低管料在搬运时可能发生的安全隐患。
技术实现思路
1、针对现有技术中存在的不足,本发明的目的在于,提供一种自适应多位置补偿的管料类工件手爪装置及方法,以实现不同规格管料夹取搬运、精准定心、提高管料的码垛数量、避免发生刮伤和磕碰等。
2、为了解决上述技术问题,本发明采用如下技术方案予以实现:
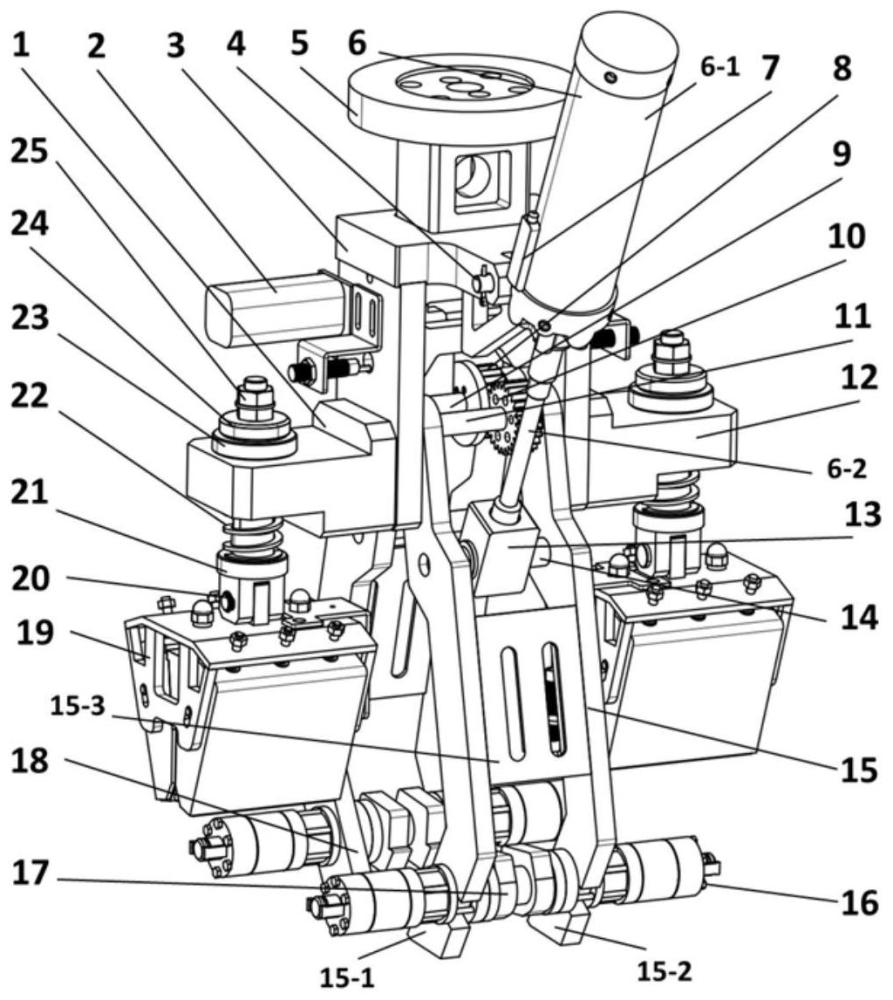
3、一种自适应多位置补偿的管料类工件手爪装置,包括主体骨架、自适应电磁吸附单元、支撑夹持锁紧单元和传感器单元;
4、所述主体骨架包括前翼架、手爪主架、手爪连接盘和后翼架;前翼架和后翼架设在手爪主架两侧;手爪连接盘设在手爪主架顶部;
5、所述自适应电磁吸附单元包括自适应电磁吸附机构、电磁吸附机构连接销、双耳滑轴、矩形弹簧、内滑套、支撑环块和锁紧螺母;自适应电磁吸附单元有两组且分别与前翼架和后翼架对应安装;自适应电磁吸附机构上端通过电磁吸附机构连接销与双耳滑轴下端铰接,双耳滑轴上部穿过内滑套,两个内滑套分别设在前翼架和后翼架上,矩形弹簧套在双耳滑轴的双耳滑轴台阶和内滑套的内滑套轴段端面之间,支撑环块通过锁紧螺母安装在双耳滑轴顶部;
6、所述支撑夹持锁紧单元包括锁紧机构、夹持气缸、从动夹持齿轮、从动夹持齿轮轴、主动夹持齿轮、主动夹持齿轮轴、主动夹持架、旋转支撑夹持机构和从动夹持架;所述锁紧机构设在手爪主架上;夹持气缸的夹紧气缸体与手爪主架铰接,夹持气缸的夹紧气缸活塞杆与主动夹持架铰接;主动夹持架与从动夹持架左右相对,且二者位于两组自适应电磁吸附单元之间;主动夹持架上端通过主动夹持齿轮轴设在手爪主架上且主动夹持架能以主动夹持齿轮轴为轴进行转动;主动夹持齿轮同轴设在主动夹持齿轮轴上并与主动夹持架固连;从动夹持架上端通过从动夹持齿轮轴设在手爪主架上且从动夹持架能以从动夹持齿轮轴为轴进行转动;从动夹持齿轮同轴设在从动夹持齿轮轴上并与从动夹持架固连,从动夹持齿轮与主动夹持齿轮相啮合;旋转支撑夹持机构在主动夹持架和从动夹持架上各设一个且对称设置;
7、所述传感器单元包括夹持气缸位置传感器、前置接近传感器、测位距光电传感器、下置接近传感器和后置接近传感器;夹持气缸位置传感器设在夹紧气缸外缸上,前置接近传感器设在前翼架的上方,后置接近传感器设在后翼架的上方,下置接近传感器设在前翼架下方的传感器安装架上,测位距光电传感器设在后翼架下方的传感器安装架上。
8、本发明还包括如下技术特征:
9、具体的,所述前翼架包括前翼架上端面、前翼架下端面和前翼架滑套孔,在前翼架滑套孔内壁设有前翼架滑套孔定位面;后翼架包括后翼架上端面、后翼架下端面和后翼架滑套孔,在后翼架滑套孔内壁设有后翼架滑套孔定位面。
10、具体的,所述内滑套设有内滑套内孔、内滑套台阶和内滑套轴段,在内滑套内孔内壁设有内滑套内孔定位面,在内滑套轴段外壁设有内滑套轴段定位面;两个内滑套的内滑套轴段分别设在前翼架滑套孔中和后翼架滑套孔中,此时一个内滑套的内滑套轴段定位面与前翼架滑套孔定位面相配合,另一个内滑套的内滑套轴段定位面与后翼架滑套孔定位面相配合,使两个内滑套分别仅能在前翼架滑套孔中滑动和后翼架滑套孔中滑动。
11、具体的,所述双耳滑轴从上到下依次为双耳滑轴小直径段、双耳滑轴滑动段、双耳滑轴台阶和连接双耳;在双耳滑轴滑动段侧壁设有双耳滑轴滑动段定位面,在连接双耳上设有双耳孔;双耳滑轴的双耳滑轴滑动段设在内滑套内孔中,双耳滑轴滑动段定位面与内滑套内孔定位面相配合,使双耳滑轴仅能在内滑套内孔中滑动;
12、所述矩形弹簧设在双耳滑轴台阶和内滑套轴段端面之间;
13、所述支撑环块穿过双耳滑轴小直径段,设在内滑套台阶上,并通过设在双耳滑轴小直径段上的锁紧螺母锁紧固定。
14、具体的,所述自适应电磁吸附机构包括电磁吸附体、吸附机构架、滑动销、吸附体推移弹簧、支撑限位复位弹簧、支撑限位体和传感器安装架;吸附机构架包括吸附机构架顶板和两个相对的吸附机构架侧板,在吸附机构架顶板上端中部设有吸附机构架定位单耳,在吸附机构架顶板上还设有吸附体推杆孔和支撑限位体滑杆孔,在吸附机构架侧板设有滑销腰孔;电磁吸附体左右对称设置在吸附机构架内,两个电磁吸附体的底面为圆管料磁吸区,两个电磁吸附体相对的面从下到上依次为三棱管料磁吸区、吸附体纵面、吸附体斜靠面、吸附体限位面和吸附体释放面,在电磁吸附体端面设有滑动销固定孔;
15、所述吸附机构架上的吸附机构架定位单耳通过电磁吸附机构连接销与双耳滑轴的连接双耳相连,将自适应电磁吸附机构铰接到双耳滑轴上;
16、所述电磁吸附体上设置多个吸附体推杆,同时伸入到吸附体推杆孔外,此时电磁吸附体能沿吸附体推杆孔的轴线方向滑动,并由吸附体推杆上的限位调节螺母限位;
17、所述吸附体推移弹簧套在吸附体推杆上,并位于电磁吸附体与吸附机构架之间;
18、所述滑动销固定在电磁吸附体的滑动销固定孔内,并与吸附机构架的滑销腰孔相配合,使电磁吸附体能在吸附体推移弹簧作用下,在吸附机构架内沿滑销腰孔进行滑动。
19、具体的,所述支撑限位体由下到上依次为支撑限位体顶杆、用于加固所述支撑限位体顶杆的顶杆加固杆、支撑限位楔形体、支撑限位体顶部台阶,支撑限位体滑杆和用于滑动限位的滑杆限位螺帽;所述支撑限位体设置在吸附机构架内,并位于两个电磁吸附体之间,此时支撑限位体滑杆穿过支撑限位体滑杆孔,在支撑限位体滑杆上设置支撑限位复位弹簧,此时支撑限位复位弹簧位于吸附机构架和支撑限位体之间;在所述支撑限位体顶杆没有受到外力时,支撑限位体在支撑限位复位弹簧作用下,其上的支撑限位体顶部台阶紧靠在吸附体限位面上,支撑限位楔形体也与吸附体斜靠面相贴合,以此限制电磁吸附体在吸附机构架内滑动,使左右两个电磁吸附体上的三棱管料磁吸附区无法向中间挤压靠拢。
20、具体的,所述主动夹持架包括前后相对的主动夹持架前板和主动夹持架后板以及连在二者之间的夹持连接轴;在主动夹持架前板和主动夹持架后板之间连有主动夹持架加固板且主动夹持架加固板靠近主动夹持架前板和主动夹持架后板拐角位置,夹持连接轴位于从动夹持架加固板上方;主动夹持架下部向内弯折且该弯折斜面为主动夹持架夹持支撑面;所述夹持齿轮轴两端穿过主动夹持架前板和主动夹持架后板后固定到手爪主架上;所述主动夹持齿轮与主动夹持齿轮轴不固定,且与主动夹持架后板固定。
21、具体的,所述从动夹持架包括前后相对的从动夹持架前板和从动夹持架后板以及能连接加固从动夹持架前板和从动夹持架后板的从动夹持架加固板,在从动夹持架加固板的上方依次设置从动夹持架固定销和从动夹持齿轮轴;从动夹持架下部向内弯折且该弯折斜面为从动夹持架夹持支撑面;所述从动夹持齿轮轴的两端穿过从动夹持架前板和从动夹持架后板后固定到手爪主架上;所述从动夹持齿轮与从动夹持架后板固定,且与从动夹持齿轮轴不固定;
22、所述夹持气缸包括夹紧气缸体和夹紧气缸活塞杆,夹紧气缸体通过夹持气缸连接销与手爪主架铰接,所述夹紧气缸活塞杆通过设置在夹持连接轴上的夹持连接块与主动夹持架铰接。
23、具体的,所述锁紧机构包括锁紧气缸、前推弹簧、锁紧滑块、锁紧盘和锁紧支架块;锁紧气缸固定在手爪主架上,锁紧盘同轴设在从动夹持齿轮轴上并与从动夹持齿轮固定,在锁紧盘上设有多个锁紧孔;锁紧支架块固定在手爪主架上,锁紧支架块上设置贯通的支架块滑槽孔;锁紧滑块穿过支架块滑槽孔,在锁紧滑块下方设置锁紧销孔,在锁紧销孔内依次同轴设置端帽、锁紧弹簧和锁紧销;锁紧销在锁紧弹簧作用下伸出到锁紧销孔外;锁紧气缸活塞杆伸过锁紧滑块上方设置的锁紧滑块上端通孔,在锁紧滑块上端通孔的前方位置设置活塞杆螺母,在锁紧气缸活塞杆上设置前推弹簧,前推弹簧位于锁紧滑块和锁紧气缸之间。
24、具体的,所述主动夹持架上的旋转支撑夹持机构位于主动夹持架夹持支撑面,在从动夹持架上的旋转支撑夹持机构位于从动夹持架夹持支撑面;
25、所述旋转支撑夹持机构为对称结构,内部设置旋转支撑轴将各转动部分连在一起;旋转支撑轴一端依次同轴设置后置旋转气缸、传扭机构、制动棘轮、锁紧定位环和支撑夹持旋转体,另一端对称同轴设置依次为前置旋转气缸、传扭机构、制动棘轮、锁紧定位环和支撑夹持旋转体;所述后置旋转气缸、传扭机构和制动棘轮通过紧固长螺钉与从动夹持架后板固定;所述前置旋转气缸、传扭机构、制动棘轮通过紧固长螺钉与从动夹持架前板固定;在主动夹持架上的旋转支撑夹持机构也通过紧固长螺钉进行固定。
26、具体的,所述传扭机构外部设置传钮滑动套外套筒和连接端盖,内部设置传钮滑动套,且在传钮滑动套大直径端面与连接端盖之间设置传钮复位弹簧;传钮滑动套和传钮滑动套外套筒之间在后置旋转气缸一端形成的腔体为传钮进气后腔,在前置旋转气缸一端为传钮进气前腔;在后置旋转气缸的一端,在仅有传钮复位弹簧的作用下,传钮滑动套设置的传钮滑动套孔锥面与后置旋转气缸传动轴锥面相分离;在前置旋转气缸的一端,传钮滑动套孔锥面与前置旋转气缸传动轴锥面相分离;传钮滑动套内孔套在小直径旋转支撑左轴段或小直径旋转支撑右轴段上,此时传钮滑动套内孔定位面与小直径左轴段定位面或小直径左轴段定位面相贴合,使传钮滑动套仅能沿小直径左轴段定位面或小直径左轴段定位面滑动。
27、具体的,所述制动棘轮包括制动棘轮外套、制动棘轮内轴、棘爪和棘爪轴;制动棘轮内轴设置在制动棘轮外套内,制动棘轮内轴上的制动棘轮内轴孔套在小直径旋转支撑左轴段或小直径旋转支撑右轴段上,此时制动棘轮内轴孔定位面和小直径左轴段定位面或大直径轴段右定位面相配合,强制制动棘轮内轴和旋转支撑轴同步转动;棘爪通过棘爪轴设置在内轴棘爪槽内,棘爪能以棘爪轴为轴在内轴棘爪槽内单向转动,反向则与制动棘轮外套形成制动,制动棘轮制动方向与后置旋转气缸和前置旋转气缸转动方向相反;
28、所述支撑夹持旋转体的旋转体内孔同轴套在大直径旋转支撑轴段,此时旋转体内孔定位面和大直径轴段左定位面或大直径轴段右定位面相贴和实现同步转动。
29、一种自适应多位置补偿的管料类工件手爪装置上下料的方法,该方法通过所述自适应多位置补偿的管料类工件手爪装置实现,该装置的初始状态为:自适应电磁吸附机构中的电磁吸附体不通电,三棱管料磁吸区和圆管料磁吸区均无吸附的磁性;电磁吸附体被支撑限位体限位,此时支撑限位体顶部台阶紧靠在吸附体限位面上,支撑限位楔形体也与吸附体斜靠面相贴合;两个内滑套的内滑套台阶分别与前翼架上端面和后翼架上端面相贴合;锁紧滑块被锁紧气缸拉向最靠近锁紧气缸的位置,此时前推弹簧被压缩,锁紧滑块与锁紧盘相分离,锁紧销完全脱离锁紧孔;夹持气缸的夹紧气缸活塞杆缩回到极限位置,主动夹持架、从动夹持架抬至前翼架上端面和后翼架上端面之上;支撑夹持旋转体的复位参考面与主动夹持架夹持支撑面或从动夹持架夹持支撑面共面。
30、具体的,对于不同规格的圆形管料的上下料包括以下步骤:
31、步骤a1,agv小车带着装载着管料的管料架到达指定位置,指定位置上的视觉系统识别出该批管料为圆形管料,然后将此信息传递给控制单元,控制单元将信息记录并按照圆形管料的上下料程序运行;
32、步骤a2,工业机器人将手爪装置置于管料架正上方某处固定位置处,通过测位距光电传感器测量管料架上的圆形管料与测位距光电传感器的距离差,然后将此信息最终传递给控制单元,控制单元根据传递过来的信息判断管料的直径规格以及管料在管料架上的坐标位置,并发出预设的程序指令;
33、步骤a3,工业机器人带着手爪装置到达预定的坐标位置,然后向下移动,由于自适应电磁吸附机构与双耳滑轴铰接,且双耳滑轴与内滑套之间设置矩形弹簧,因此具有定位补偿性,能使电磁吸附体的圆管料磁吸区接触到圆形管料上;此时手爪装置继续向下移动,自适应电磁吸附机构和双耳滑轴同步向上移动,并压缩矩形弹簧,待到矩形弹簧被压缩,内滑套也向上移动,待内滑套移动到与前置接近传感器或后置接近传感器平齐时,接近传感器或后置接近传感器被点亮,此时将信息传递给控制单元,控制单元将电磁吸附体通电,圆管料磁吸区变得有磁性并吸附圆形管料;
34、步骤a4,下置接近传感器在圆形管料被吸附后开始点亮,用于检测手爪装置在搬运圆形管料的过程中有没有掉落,如果圆形管料发生掉落,手爪装置将启动安全模式,紧急开启锁紧机构或将主动夹持架和从动夹持架紧急闭合;
35、步骤a5,电磁吸附体将圆形管料吸附,由于自重作用,自适应电磁吸附机构、双耳滑轴和内滑套向下移动,此时前置接近传感器或后置接近传感器接收到内滑套向下离开的信息,同时将此信息传递给控制单元,控制单元根据手爪装置预设的移动速度,控制夹持气缸的夹紧气缸活塞杆向外伸展,夹持气缸位置传感器实时监测移动距离,待到移动到预设距离后,夹持气缸位置传感器将信息传递给控制单元,控制单元将气缸活塞杆稳定在此处位置,此时主动夹持架和从动夹持架按照预设角度闭合,圆形管料下部被主动夹持架夹持支撑面和从动夹持架夹持支撑面夹紧支撑,并完成圆形管料在手抓装置上的定心;
36、步骤a6,锁紧气缸的锁紧气缸活塞杆向外快速伸出,锁紧滑块在前推弹簧的作用下迅速朝锁紧气缸活塞杆移动方向滑动,并最终与锁紧盘相贴合,此时锁紧销插入到锁紧孔内,使从动夹持齿轮无法再转动,完成主动夹持架和从动夹持架的闭合自锁;
37、步骤a7,工业机器人将手爪装置移动到加工设备指定坐标位置处,待设备夹具将圆形管料夹紧后,控制单元发送指令,锁紧气缸的锁紧气缸活塞杆缩回,并拉动锁紧滑块向靠近锁紧气缸的方向滑动,直至锁紧滑块上的锁紧销脱离锁紧孔;与此同时,夹紧气缸活塞杆缩回,此时主动夹持架和从动夹持架张开,电磁吸附体断电并不再吸附圆形管料,手爪装置提起并回到步骤a1的位置处继续上下料。
38、具体的,对于不同规格的三棱管料的上下料包括以下步骤:
39、步骤b1和步骤b2与圆形管料上下料步骤a1和步骤a2相同;
40、步骤b3,工业机器人带动手爪装置到达预定的坐标位置,然后向下移动,由于自适应电磁吸附机构、双耳滑轴、内滑套和矩形弹簧组合的结构具有定位补偿作用,能使电磁吸附体接触到三棱管料棱边两端的棱面上;此时手爪装置继续向下移动,三棱管料的棱边顶在支撑限位体顶杆上,并推动支撑限位体向上移动,此时支撑限位体顶部台阶由吸附体限位面移动至吸附体释放面,支撑限位楔形体也与吸附体斜靠面存在间隙,使左右两个电磁吸附体不再被支撑限位体限位,在吸附体推移弹簧作用下,沿滑销腰孔滑动,并向中间挤压靠拢,使三棱管料磁吸区与三棱管料的棱面贴合;
41、步骤b4,手爪装置继续向下移动,待到内滑套移动到与前置接近传感器或后置接近传感器平齐时,接近传感器或后置接近传感器被点亮,此时控制单元将电磁吸附体通电,三棱管料磁吸区获得磁性,将三棱管料的棱面吸附住;
42、步骤b5,此步骤与圆形管料的上下料步骤a4相同;
43、步骤b6,传钮进气前腔进入高压气体,推动传钮滑动套沿小直径右轴段定位面向压缩传钮复位弹簧的方向滑动,直至传钮滑动套孔锥面与前置旋转气缸传动轴锥面紧靠;此时启动前置旋转气缸,所述前置旋转气缸旋转最大角度为180°,前置旋转气缸通过紧靠的传钮滑动套孔锥面与前置旋转气缸传动轴锥面,带动旋转支撑轴和支撑夹持旋转体一起转动,待转到预设角度后,前置旋转气缸停止转动;
44、步骤b7,电磁吸附体将三棱管料吸附,自适应电磁吸附机构、双耳滑轴和内滑套在自重的作用下向下移动,此时内滑套向下离开,控制单元接收到来自前置接近传感器或后置接近传感器的信息,根据手爪装置预设的移动速度,控制夹持气缸的夹紧气缸活塞杆向外伸展到预设程序要求的距离,控制单元将气缸活塞杆稳定在此处位置,主动夹持架和从动夹持架完成预设角度的闭合;三棱管料下部棱面被设置在两端的旋转体水平支撑面支撑,三棱管料下部棱边被旋转体纵向夹持面夹持,完成三棱管料在手爪装置上的定心;
45、步骤b8,此步骤与圆形管料的上下料步骤a6相同,该步骤完成主动夹持架和从动夹持架的锁紧;与此同时,旋转支撑夹持机构设置的制动棘轮的制动方向与前置旋转气缸和后置旋转气缸转动方向均相反,且制动棘轮定位在旋转支撑轴上,对支撑夹持旋转体的转动具有锁紧的作用;
46、步骤b9,工业机器人将手爪装置移动到加工设备指定坐标位置处,待特制的三棱管料夹具将三棱管料夹紧后,控制单元发送指令,锁紧气缸的锁紧气缸活塞杆缩回,并拉动锁紧滑块向靠近锁紧气缸的方向滑动,直至锁紧滑块上的锁紧销脱离锁紧孔;夹紧气缸活塞杆缩回,此时主动夹持架和从动夹持架张开;
47、步骤b10,与此同时,传钮进气前腔卸压,传钮滑动套在传钮复位弹簧的作用下复位到原来的位置,此时传钮滑动套孔锥面与前置旋转气缸传动轴锥面相脱离,启动前置旋转气缸,将前置旋转气缸的转动位置反向转动到初始位置;然后将传钮进气后腔注入高压气体,推动传钮滑动套沿小直径左轴段定位面向压缩传钮复位弹簧的方向滑动,直至传钮滑动套孔锥面与后置旋转气缸传动轴锥面紧靠;此时后置旋转气缸启动,所述后置旋转气缸旋转最大角度依然为180°,后置旋转气缸带动旋转支撑轴和支撑夹持旋转体一起转动,待转到复位参考面与主动夹持架夹持支撑面或从动夹持架夹持支撑面共面后,传钮进气后腔卸压,传钮滑动套复位,传钮滑动套孔锥面与后置旋转气缸传动轴锥面相脱离,后置旋转气缸反转到初始位置;电磁吸附体断电并不再吸附三棱管料,手爪装置提起并回到步骤b1的位置处继续上下料。
48、本发明与现有技术相比,具有如下技术效果:
49、本发明装置及方法不仅结构紧凑,能适应不同规格的圆形管料和三棱管料的夹取搬运,且具备多位置补偿功能,能实现圆形管料和三棱管料在搬运过程的精准定心;同时设置高可靠性的锁紧机构,以降低手爪装置在夹取搬运时的安全隐患
50、本发明使管料类工件手爪装置具有自适应吸附夹取功能,能够实现不同规格的圆形管料和三棱管料的上下料作业要求。手爪装置设置自适应电磁吸附机构,该机构的电磁吸附体具有三棱管料磁吸区和圆管料磁吸区,分别用于三棱管料的吸附和圆形管料的吸附。除此之外,设置用于支撑和夹紧圆形管料的主动夹持架和从动夹持架,同时在该夹持架上设置专用于支撑和夹紧三棱管料的旋转支撑夹持机构,手爪装置在搬运圆形管料时,该机构在旋转气缸的作用下,将专用于支撑和夹取三棱管料的支撑夹持旋转体收回,不影响圆形管料的支撑和夹取;当搬运三棱管料时,专用于支撑和夹取三棱管料的支撑夹持旋转体转出,实现三棱管料的支撑和夹取动作。
51、本发明使管料类工件手爪装置具有多位置补偿功能,能够实现管料的多方位夹取。自适应电磁吸附机构与双耳滑轴是铰接在一起的,且双耳滑轴与内滑套之间设置矩形弹簧,因此具有一定的定位补偿,可以让电磁吸附体很好地接触到管料上;自适应电磁吸附机构上设置支撑限位体,用于限制电磁吸附体向中间滑动靠拢,当吸附圆形管料时,该支撑限位体不做向上滑动,而当吸附三棱管料时,三棱管料的棱边顶着支撑限位体向上移动,此时没有支撑限位体限制的电磁吸附体向中间滑动靠拢,紧紧贴合在三棱管料的吸附面上,完成三棱管料吸附位置补偿。
52、本发明使管料类工件手爪装置具有支撑和夹紧的锁紧功能,实现自动上下料的安全作业。通过锁住从动夹持齿轮不让其转动,即可实现主动夹持架和从动夹持架在支撑和夹取时的锁紧功能。在从动夹持齿轮上设置锁紧盘,锁紧盘上设置若干个锁紧孔,每个锁紧孔对应着不同规格管料的支撑夹取位置,其上方设置锁紧气缸,气缸的活塞杆穿过锁紧滑块,在锁紧滑块与气缸之间设置前推弹簧,锁紧滑块下部设置与锁紧孔能相互配合的锁紧销,这样在主动夹持架和从动夹持架张合到预定位置时,锁紧气缸活塞伸出,在前推弹簧的作用下,锁紧滑块迅速与锁紧盘相贴合,此时锁紧销插入到锁紧孔内,实现锁紧动作。当解锁时,让锁紧气缸活塞缩回并拉回锁紧滑块,使锁紧销与锁紧孔相脱离即可。而当断电断气时,锁紧滑块在前推弹簧的作用下,迅速与锁紧盘相贴合,使锁紧销插入到锁紧孔,完成断电断气时的锁紧功能。除此之外,旋转支撑夹持机构设置制动棘轮,该制动棘轮的制动方向与前后置旋转气缸旋转方向相反,实现三棱管料支撑和夹取的锁紧功能。
53、本发明使管料类工件手爪装置具有精准的定心功能,实现高精度定位。手爪装置设置用于支撑和夹取的主动夹持架和从动夹持架,主动夹持架和从动夹持架上的主动夹持齿轮和从动夹持齿轮相互啮合,同步性较好,在自适应吸附圆形管料后,通过主动夹持架和从动夹持架上的夹持支撑面即可实现较为精准的定心。手爪装置在主动夹持架和从动夹持架上设置专用于支撑和夹持的三棱管料的旋转支撑夹持机构,该机构的设置用于支撑三棱管料底面的旋转体水平支撑面,也设置用于夹持三棱管料两端棱边的旋转体纵向夹持面,两者的共同作用可很好地实现三棱管料的定心。
- 还没有人留言评论。精彩留言会获得点赞!