一种垃圾分拣用机械手
本发明属于垃圾分拣,具体涉及一种垃圾分拣用机械手。
背景技术:
1、在垃圾分类过程中,由于垃圾混杂在一起,为了提高对工作人员的身体健康防护,通过分拣机械手进行分类,垃圾中夹带有污液,机械手移动过程中会带起污液影响分拣垃圾。
2、现有机械手不能够调整机械手的整体高度,容易影响机械手夹持垃圾。
3、在授权公告号为cn116372901a的专利中公开了一种垃圾分拣用机械手,包括关节机械臂、龙门型支架、分离箱体、旋转驱动机构和开闭驱动机构;龙门型支架连接于关节机械臂的输出端;分离箱体转动连接于龙门型支架,分离箱体具有一开口,开口的两侧分别铰接有能够封盖开口的爪板,爪板上均布有透水条孔;分离箱体的底部均布有多个透水通孔;旋转驱动机构连接于龙门型支架,并用于驱动分离箱体转动;开闭驱动机构连接于分离箱体的一侧,并用于驱动两个爪板进行开闭动作。
4、上述专利公开的机械手不能够调整机械手的整体高度;因此,如何提供一种垃圾分拣用机械手是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的主要目的是提供一种垃圾分拣用机械手,以解决上述技术问题。该装置设置有机械臂机构用于控制夹持机构的高度以及角度。
2、为了达到上述目的,本发明采用下述技术方案:
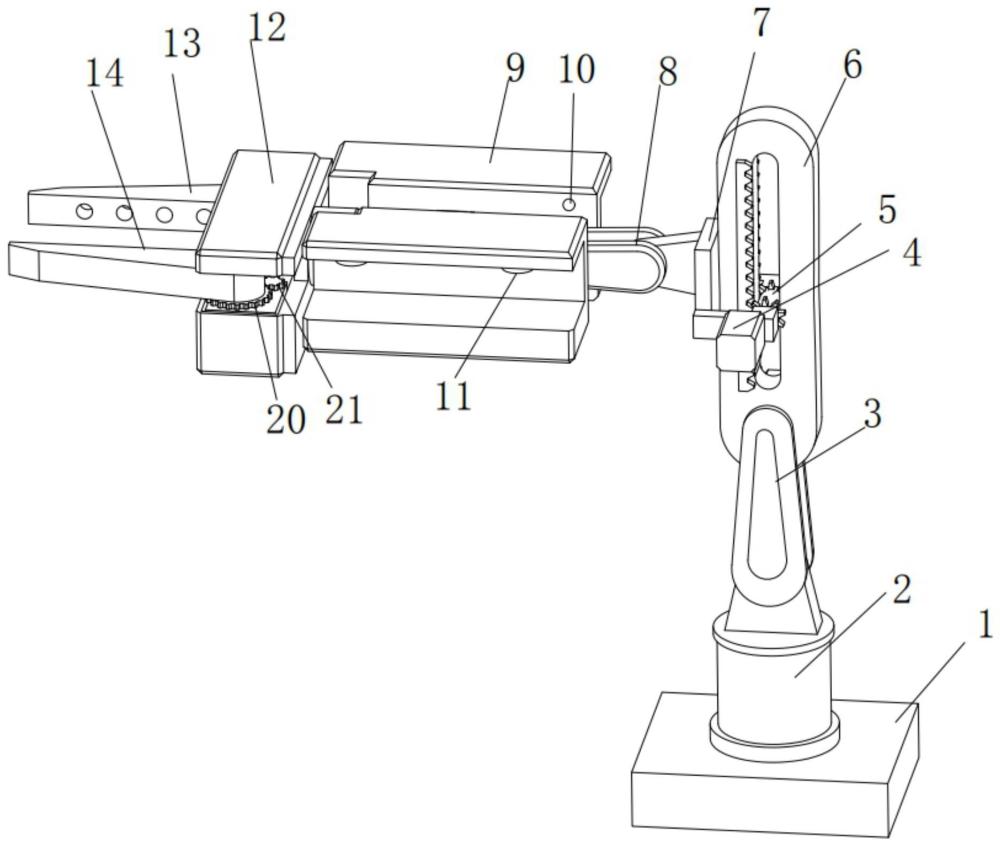
3、一种垃圾分拣用机械手,其特征在于,包括底座、机械臂机构以及夹持机构,所述机械臂机构一端固定在底座上,另一端与夹持机构连接,所述机械臂机构与夹持机构连接处固定设置有清洗机构,所述夹持机构用于夹持垃圾,机械臂机构用于控制夹持机构的高度以及角度。
4、进一步的,所述机械臂机构包括转动连接件、第一机械臂、升降组件、第二机械臂、连接件、转动电机、电机五以及电机输出端壳体,所述转动连接件内设置有转动电机,所述转动电机的输出端与底座连接,所述转动连接件远离底座的一端与第一机械臂一端铰接,所述转动连接件与第一机械臂铰接处设置有转动电机,所述第一机械臂远离转动连接件的一端与升降组件一端铰接,所述第一机械臂与升降组件铰接处设置有转动电机,所述升降组件远离第一机械臂的一端与第二机械臂铰接,所述第二机械臂与升降组件铰接处设置有转动电机,所述第二机械臂远离升降组件的一端与连接件铰接,所述第二机械臂与连接件铰接处设置有转动电机,所述连接件远离第二机械臂的一端固定设置有电机五,所述电机五的输出端与电机输出端壳体固定连接,所述电机输出端壳体与夹持机构固定连接。
5、进一步的,所述升降组件包括电机二、传动齿轮、升降臂、升降件以及齿条,所述第一机械臂远离转动连接件的一端与升降臂一端铰接,所述第一机械臂与升降臂铰接处设置有转动电机,所述升降臂上设置有条形通孔,所述条形通孔两侧固定设置有齿条,所述条形通孔内设置有传动齿轮,所述传动齿轮与齿条啮合,所述传动齿轮设置在升降件之间,所述升降件一侧设置有电机二,所述传动齿轮一端与升降件转动连接,另一端与所述电机二输出端传动连接,所述升降件远离升降臂的一端与第二机械臂铰接,所述第二机械臂与升降件铰接处设置有转动电机。
6、进一步的,所述夹持机构包括夹持机构壳体、第一夹持件、第二夹持件、电机三、双向螺杆、电机四、夹持块、齿轮一、齿轮二以及导向柱二,所述夹持机构壳体与电机输出端壳体固定连接,所述夹持机构壳体内部顶端设置有条状槽,两个所述导向柱二一端抵接在条状槽内,另一端分别贯穿第一夹持件以及第二夹持件,两个所述导向柱二分别抵接在第一夹持件以及第二夹持件下方夹持块内部底端,所述第一夹持件以及第二夹持件底端均固定设置有齿轮一,所述第一夹持件以及第二夹持件下方的夹持块顶端均设置有齿轮二,所述齿轮二与齿轮一互相啮合,所述齿轮二下方的轮轴均与电机四的输出端连接,所述电机四设置在夹持块内,所述双向螺杆一端贯穿夹持机构壳体、夹持块以及导向柱二,并分别与两个导向柱二螺纹连接,并抵接夹持机构壳体内壁,所述双向螺杆另一端与电机三输出端连接。
7、进一步的,所述双向螺杆远离电机三一端还设置有收线柱柱体,所述收线柱柱体贯穿远离电机三的夹持块外壳。
8、进一步的,所述第一夹持件上还设置有通孔,所述通孔用于适配第二夹持件。
9、进一步的,所述第二夹持件包括夹持件壳体、尖刺部、固定板、弹簧、导向柱一、连接绳以及限位柱,所述夹持件壳体上设置有多个尖刺孔,所述尖刺孔内均设置有尖刺部,所述尖刺部底端固定在固定板上,所述固定板被多个导向柱一贯穿,所述导向柱一上套设有弹簧,所述弹簧一端抵接在固定板上,另一端抵接在夹持件壳体内壁,所述夹持件壳体内壁还固定设置有穿线孔以及多个限位柱,所述固定板底端与连接绳一端固定连接,所述连接绳另一端贯穿穿线孔以及夹持件壳体与收线柱柱体连接。
10、进一步的,所述连接件上固定连接有清洗机构,所述清洗机构包括清洗机构壳体,所述清洗机构壳体固定在连接件靠近电机五的一端,所述清洗机构壳体上设置有凹槽,所述凹槽顶端设置有清洗喷头,所述清洗机构壳体上设置有进水孔。
11、与现有技术相比,本发明具有以下有益效果:
12、本发明设置有机械臂机构用于控制夹持机构的高度以及角度;通过清洗机构能够对第一夹持件以及第二夹持件进行清洗;夹持机构上设置有尖刺部,并通过弹簧以及连接绳控制尖刺部的弹出与收缩。
技术特征:
1.一种垃圾分拣用机械手,其特征在于,包括底座(1)、机械臂机构以及夹持机构,所述机械臂机构一端固定在底座(1)上,另一端与夹持机构连接,所述机械臂机构与夹持机构连接处固定设置有清洗机构,所述夹持机构用于夹持垃圾,机械臂机构用于控制夹持机构的高度以及角度。
2.根据权利要求1所述的一种垃圾分拣用机械手,其特征在于:所述机械臂机构包括转动连接件(2)、第一机械臂(3)、升降组件、第二机械臂(8)、连接件(16)、转动电机、电机五以及电机输出端壳体(15),所述转动连接件(2)内设置有转动电机,所述转动电机的输出端与底座(1)连接,所述转动连接件(2)远离底座(1)的一端与第一机械臂(3)一端铰接,所述转动连接件(2)与第一机械臂(3)铰接处设置有转动电机,所述第一机械臂(3)远离转动连接件(2)的一端与升降组件一端铰接,所述第一机械臂(3)与升降组件铰接处设置有转动电机,所述升降组件远离第一机械臂(3)的一端与第二机械臂(8)铰接,所述第二机械臂(8)与升降组件铰接处设置有转动电机,所述第二机械臂(8)远离升降组件的一端与连接件(16)铰接,所述第二机械臂(8)与连接件(16)铰接处设置有转动电机,所述连接件(16)远离第二机械臂(8)的一端固定设置有电机五,所述电机五的输出端与电机输出端壳体(15)固定连接,所述电机输出端壳体(15)与夹持机构固定连接。
3.根据权利要求2所述的一种垃圾分拣用机械手,其特征在于:所述升降组件包括电机二(4)、传动齿轮(5)、升降臂(6)、升降件(7)以及齿条,所述第一机械臂(3)远离转动连接件(2)的一端与升降臂(6)一端铰接,所述第一机械臂(3)与升降臂(6)铰接处设置有转动电机,所述升降臂(6)上设置有条形通孔,所述条形通孔两侧固定设置有齿条,所述条形通孔内设置有传动齿轮(5),所述传动齿轮(5)与齿条啮合,所述传动齿轮(5)设置在升降件(7)之间,所述升降件(7)一侧设置有电机二(4),所述传动齿轮(5)一端与升降件(7)转动连接,另一端与所述电机二(4)输出端传动连接,所述升降件(7)远离升降臂(6)的一端与第二机械臂(8)铰接,所述第二机械臂(8)与升降件(7)铰接处设置有转动电机。
4.根据权利要求3所述的一种垃圾分拣用机械手,其特征在于:所述夹持机构包括夹持机构壳体(12)、第一夹持件(13)、第二夹持件(14)、电机三(17)、双向螺杆(18)、电机四、夹持块、齿轮一(20)、齿轮二(21)以及导向柱二(19),所述夹持机构壳体(12)与电机输出端壳体(15)固定连接,所述夹持机构壳体(12)内部顶端设置有条状槽,两个所述导向柱二(19)一端抵接在条状槽内,另一端分别贯穿第一夹持件(13)以及第二夹持件(14),两个所述导向柱二(19)分别抵接在第一夹持件(13)以及第二夹持件(14)下方夹持块内部底端,所述第一夹持件(13)以及第二夹持件(14)底端均固定设置有齿轮一(20),所述第一夹持件(13)以及第二夹持件(14)下方的夹持块顶端均设置有齿轮二(21),所述齿轮二(21)与齿轮一(20)互相啮合,所述齿轮二(21)下方的轮轴均与电机四的输出端连接,所述电机四设置在夹持块内,所述双向螺杆(18)一端贯穿夹持机构壳体(12)、夹持块以及导向柱二(19),并分别与两个导向柱二(19)螺纹连接,并抵接夹持机构壳体(12)内壁,所述双向螺杆(18)另一端与电机三(17)输出端连接。
5.根据权利要求4所述的一种垃圾分拣用机械手,其特征在于:所述双向螺杆(18)远离电机三(17)一端还设置有收线柱柱体(23),所述收线柱柱体贯穿远离电机三(17)的夹持块外壳。
6.根据权利要求4所述的一种垃圾分拣用机械手,其特征在于:所述第一夹持件(13)上还设置有通孔(13.1),所述通孔(13.1)用于适配第二夹持件(14)。
7.根据权利要求4所述的一种垃圾分拣用机械手,其特征在于:所述第二夹持件(14)包括夹持件壳体、尖刺部(14.1)、固定板(14.2)、弹簧(14.3)、导向柱一(14.4)、连接绳(14.5)以及限位柱(14.6),所述夹持件壳体上设置有多个尖刺孔,所述尖刺孔内均设置有尖刺部(14.1),所述尖刺部(14.1)底端固定在固定板(14.2)上,所述固定板(14.2)被多个导向柱一(14.4)贯穿,所述导向柱一(14.4)上套设有弹簧(14.3),所述弹簧(14.3)一端抵接在固定板(14.2)上,另一端抵接在夹持件壳体内壁,所述夹持件壳体内壁还固定设置有穿线孔以及多个限位柱(14.6),所述固定板(14.2)底端与连接绳(14.5)一端固定连接,所述连接绳(14.5)另一端贯穿穿线孔以及夹持件壳体与收线柱柱体(23)连接。
8.根据权利要求3所述的一种垃圾分拣用机械手,其特征在于:所述连接件(16)上固定连接有清洗机构,所述清洗机构包括清洗机构壳体(9),所述清洗机构壳体(9)固定在连接件(16)靠近电机五的一端,所述清洗机构壳体(9)上设置有凹槽,所述凹槽顶端设置有清洗喷头(11),所述清洗机构壳体(9)上设置有进水孔(10)。
技术总结
本发明公开了一种垃圾分拣用机械手,属于垃圾分拣技术领域,包括底座、机械臂机构以及夹持机构,机械臂机构一端固定在底座上,另一端与夹持机构连接,机械臂机构与夹持机构连接处固定设置有清洗机构,夹持机构用于夹持垃圾,机械臂机构用于控制夹持机构的高度以及角度;本发明设置有机械臂机构用于控制夹持机构的高度以及角度。
技术研发人员:李丹,郭林炀,陈琳
受保护的技术使用者:扬州工业职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!