一种下肢外骨骼的拟人粘弹性柔顺控制方法
本发明涉及机器人,尤其涉及一种下肢外骨骼的拟人粘弹性柔顺控制方法。
背景技术:
1、自平衡下肢外骨骼机器人是一类高自由度、全驱动、无需拐杖或推车等额外辅助支撑工具便可动态平衡行走的机器人,它可以帮助截瘫、截瘫、四肢瘫患者进行下肢医疗康复训练以及替代轮椅提供支撑并实现动态平衡行走。
2、现有的自平衡下肢外骨骼机器人由于设计的缺陷还存在一些待解决问题。在结构上,机器人与穿戴者在髋关节处存在显著的轴向偏差,这会导致穿戴者的不舒服;且很多现有的自平衡下肢外骨骼机器人直接将驱动电机安装在膝关节、踝关节上,导致机器人腿部末端的高惯性,这增加了控制和驱动自平衡下肢外骨骼机器人的难度。在控制上,现有的控制方法的稳定性依赖于穿戴者和机器人精确的物理参数,这是很难通过实验方法来测量;并且现有的控制策略没有包含柔顺性元素,使得外骨骼与地面之间存在显著性的冲击力,导致机器人稳定性较差。
技术实现思路
1、有鉴于此,本发明提供一种下肢外骨骼的拟人粘弹性柔顺控制方法,以解决上述问题。
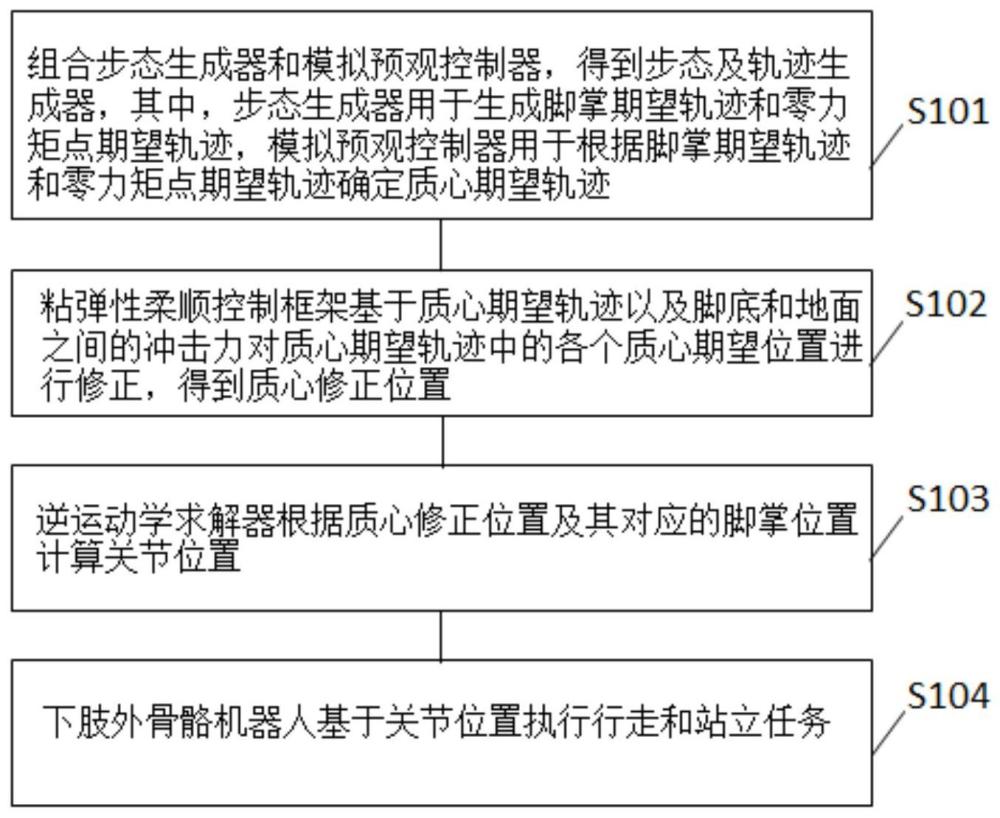
2、本发明提供一种下肢外骨骼的拟人粘弹性柔顺控制方法,包括:组合步态生成器和模拟预观控制器,得到步态及轨迹生成器,其中,步态生成器用于生成脚掌期望轨迹和零力矩点期望轨迹,模拟预观控制器用于根据脚掌期望轨迹和零力矩点期望轨迹确定质心期望轨迹;粘弹性柔顺控制框架基于质心期望轨迹以及脚底和地面之间的冲击力对质心期望轨迹中的各个质心期望位置进行修正,得到质心修正位置;逆运动学求解器根据质心修正位置及其对应的脚掌位置计算关节位置;下肢外骨骼机器人基于关节位置执行行走和站立任务。
3、在本发明的另一实现方式中,粘弹性柔顺控制框架包括质心期望位置、质心实际位置以及拟人粘弹性数学模型作为两个质心之间的虚拟连接,其中,质量集中的可移动点代表下肢外骨骼机器人的质心,无质量腿的支撑区域代表下肢外骨骼机器人的脚掌。
4、在本发明的另一实现方式中,下肢外骨骼机器人包括:腰部,右下肢分支,左下肢分支;其中,至少包含12个驱动关节,自由度对称地分布在右下肢分支和左下肢分支中,每个下肢分支有6个自由度,分别包含:髋关节内收和外展、髋关节屈和伸、髋关节内翻和外翻、膝关节屈和伸、踝关节内翻和外翻、踝关节背屈和跖屈。
5、在本发明的下肢外骨骼的拟人粘弹性柔顺控制方法中,拟人粘弹性柔顺控制框架是基于下肢外骨骼机器人质心动态模型基础上建立的,该方法可以无视穿戴者的像身高、体重和惯性等身体特征参数;同时,拟人粘弹性柔顺控制框架对不同外骨骼穿戴者的身体参数具有柔顺性和较强的鲁棒性;通过拟人粘弹性柔顺控制框架把主动粘弹性柔顺引入到下肢外骨骼机器人中,以提高下肢外骨骼机器人行走过程中的稳定性。其次,通过设计具有12个驱动关节以及新颖的串并联混合机构的下肢外骨骼机器人,可以增强结构刚度、减小腿部惯性以及解决外骨骼机器人与穿戴者之间髋关节轴向偏差问题。
技术特征:
1.一种下肢外骨骼的拟人粘弹性柔顺控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述粘弹性柔顺控制框架包括所述质心期望位置、质心实际位置以及拟人粘弹性数学模型作为两个质心之间的虚拟连接,其中,质量集中的可移动点代表所述下肢外骨骼机器人的质心,无质量腿的支撑区域代表所述下肢外骨骼机器人的脚掌。
3.根据权利要求1所述的方法,其特征在于,所述下肢外骨骼机器人包括:
技术总结
本发明提供一种下肢外骨骼的拟人粘弹性柔顺控制方法,包括:组合步态生成器和模拟预观控制器,得到步态及轨迹生成器,其中,步态生成器用于生成脚掌期望轨迹和零力矩点期望轨迹,模拟预观控制器用于根据脚掌期望轨迹和零力矩点期望轨迹确定质心期望轨迹;粘弹性柔顺控制框架基于质心期望轨迹以及脚底和地面之间的冲击力对质心期望轨迹中的各个质心期望位置进行修正,得到质心修正位置;逆运动学求解器根据质心修正位置及其对应的脚掌位置计算关节位置;下肢外骨骼机器人基于关节位置执行行走和站立任务。本发明的下肢外骨骼的拟人粘弹性柔顺控制方法提高了机器人行走的稳定性。
技术研发人员:吴新宇,田定奎,张石生,李锋,陈自强,李文韬,祝元培,李金科,尹猛
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!