一种流水线倒瓶移出控制系统及装置
本发明涉及机器人,具体涉及一种流水线倒瓶移出控制系统及装置。
背景技术:
1、在流水作业的流水线上,会出现原本应直立的瓶状容器出现倒伏的情况,针对倒伏瓶状容器的问题,当前解决方案主要有人工移出、利用巧妙的机械结构移出、机器人直接抓取移出等。
2、对于高洁净度要求的生产车间,一般采用人工移出,此时,要求工人穿着密闭的洁净工作服,进入车间工作,并且通过自动化密闭生产线四周的橡胶手套将倒伏的药瓶扶起或清除,整个工作过程强度不大,但是需要长时间值班,进出都车间都需要洁净处理。
3、机械结构移出通常使用踢瓶装置例如公开号为cn210029097u的用于饮料瓶输送线的踢瓶装置,巧妙结构例如公开号为cn219429072u的具有倒瓶剔除功能的兽药瓶输送装置等方式,这类方式结构简单,但无法解决玻璃瓶倒伏后,卡停自动化流水线的问题。
4、随着机器人技术的发展,出现了利用机器人进行直接抓取的解决办法,常用的机器人末端执行器有气泵吸头、机器人手爪等。相较之前的方案,确实能够在自动化水平和精度上有很大的进步,但是在瓶状容器较为密集的情况下直接抓取,无论是选择手指抓取,还是气动吸取,在抓取过程中,会使被抓取的瓶状容器产生小型运动,进而容易干扰周围正常的瓶状容器,造成正常瓶状容器的二次倒伏。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种流水线倒瓶移出控制系统及装置,以解决现有技术中在对倒伏瓶状容器进行抓取时,容易干扰周围正常的瓶状容器,造成正常瓶状容器的二次倒伏的问题。
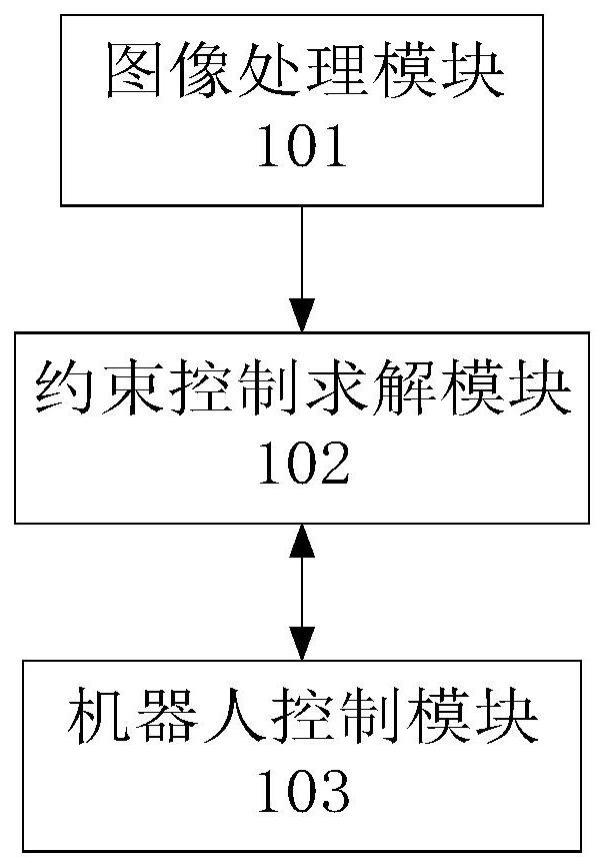
2、根据本发明实施例的第一方面,提供一种流水线倒瓶移出控制系统,包括:
3、图像处理模块,用于实时获取图像数据,根据所述图像数据得出瓶状容器的位置数据和姿态数据;
4、机器人控制模块,用于获取机器人相关数据;
5、约束控制求解模块,用于根据所述机器人相关数据、所述瓶状容器的姿态数据,计算得到阻抗控制量;
6、所述机器人控制模块,还用于根据所述阻抗控制量和所述瓶状容器的位置数据,生成控制指令,并将所述控制指令发送至机器人控制器,以使机器人根据所述控制指令,先对所述倒瓶进行搓动位移远离其余瓶状容器,再对所述倒瓶进行移取。
7、优选的,所述图像处理模块,还能够利用目标检测算法对所述图像数据中的瓶状容器进行检测,得到图像数据中瓶状容器的姿态数据和位置数据;所述位置数据选择所述瓶状容器的体心。
8、优选的,所述约束控制求解模块,还能够根据预先设置的关节约束和运动约束,构造二次规划方程;将所述机器人相关数据、所述瓶状容器的姿态数据带入所述二次规划方程,计算得到阻抗控制量。
9、优选的,所述机器人控制模块,在生成控制指令时,还能够根据所述位置数据得出瓶状容器在相机坐标系中的坐标,将所述瓶状容器在相机坐标系中的坐标通过坐标变换得到瓶状容器在基坐标系中的坐标。
10、根据本发明实施例的第二方面,提供一种流水线倒瓶移出装置,包括:
11、机械臂系统和上位机;所述上位机包括上述任意一项所述的流水线倒瓶移出控制系统;所述机械臂系统包括机械臂主体、相机和末端执行器;所述末端执行器包括转动关节,以及与所述转动关节分别相连的第一执行部件和第二执行部件;
12、所述机械臂主体上安装所述相机和所述末端执行器,所述机械臂主体用于控制末端执行器的位置和姿态,并施加阻抗控制量;
13、所述相机用于实时获取图像数据,并将所述图像数据发送至所述上位机;
14、所述转动关节用于实现第一执行部件和第二执行部件的切换;所述第一执行部件用于对倒伏的瓶状容器进行搓动位移,使其远离其余瓶状容器;所述第二执行部件用于对搓动后的倒伏瓶状容器进行移取。
15、优选的,所述第一执行部件为摩擦棒形执行器,所述摩擦棒形执行器顶部配有橡胶头的铝合金圆柱。
16、优选的,所述第二执行部件为气动吸盘,用于对搓动后的倒伏瓶状容器进行吸取,并重新放置。
17、优选的,所述第二执行部件为机械抓手,用于对搓动后的倒伏瓶状容器进行抓取,并重新放置。
18、本发明的实施例提供的技术方案可以包括以下有益效果:
19、可以理解的是,本发明示出的一种流水线倒瓶移出控制系统,包括:图像处理模块,用于实时获取图像数据,得出瓶状容器的位置数据和姿态数据;机器人控制模块,用于获取机器人相关数据;约束控制求解模块,用于根据机器人相关数据、瓶状容器的姿态数据,计算得到阻抗控制量;机器人控制模块,还用于根据阻抗控制量和瓶状容器的位置数据,生成控制指令,并将控制指令发送至机器人控制器,以使机器人根据控制指令,先对倒瓶进行搓动位移远离其余瓶状容器,再对倒瓶进行移取。可以理解的是,本发明示出的技术方案,可以对密集的瓶状容器群中的倒瓶进行无二次碰撞的自动化分离,避免造成正常瓶状容器的二次倒伏。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种流水线倒瓶移出控制系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,
3.根据权利要求1所述的系统,其特征在于,
4.根据权利要求1所述的系统,其特征在于,
5.一种流水线倒瓶移出装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述第一执行部件为摩擦棒形执行器,所述摩擦棒形执行器顶部配有橡胶头的铝合金圆柱。
7.根据权利要求5所述的装置,其特征在于,所述第二执行部件为气动吸盘,用于对搓动后的倒伏瓶状容器进行吸取,并重新放置。
8.根据权利要求5所述的装置,其特征在于,所述第二执行部件为机械抓手,用于对搓动后的倒伏瓶状容器进行抓取,并重新放置。
技术总结
本发明涉及机器人技术领域,具体涉及一种流水线倒瓶移出控制系统,包括:图像处理模块,用于实时获取图像数据,得出瓶状容器的位置数据和姿态数据;机器人控制模块,用于获取机器人相关数据;约束控制求解模块,用于根据机器人相关数据、瓶状容器的姿态数据,计算得到阻抗控制量;机器人控制模块,还用于根据阻抗控制量和瓶状容器的位置数据,生成控制指令,并将控制指令发送至机器人控制器,以使机器人根据控制指令,先对倒瓶进行搓动位移远离其余瓶状容器,再对倒瓶进行移取。可以理解的是,本发明示出的技术方案,可以对密集的瓶状容器群中的倒瓶进行无二次碰撞的自动化分离,避免造成正常瓶状容器的二次倒伏。
技术研发人员:贺京杰,刘强,王普
受保护的技术使用者:北京石油化工学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!