一种多功能陪伴助老机器人的制作方法
本发明涉及陪伴机器人,尤其涉及一种多功能陪伴助老机器人。
背景技术:
1、随着近年来老人的数量逐渐增长,中国已经步入老龄化社会。未来,人口将加速老龄化。老年人口的增多,将进一步壮大老年人产业,关于老人安全的问题也逐渐受到重视。而随着互联网时代的发展,受限于视力障碍、记忆力严重下降等问题,老年人很难及时的学会使用通讯工具,生活需求方面也受到限制;空巢老人生活无人照料,缺少陪伴,紧急情况无法及时传达和解决等等,故本发明提出一种多功能陪伴助老机器人。
技术实现思路
1、本发明提供了一种多功能陪伴助老机器人,以解决上述背景技术中提出的问题。
2、为了实现上述目的,本发明采用了如下技术方案:
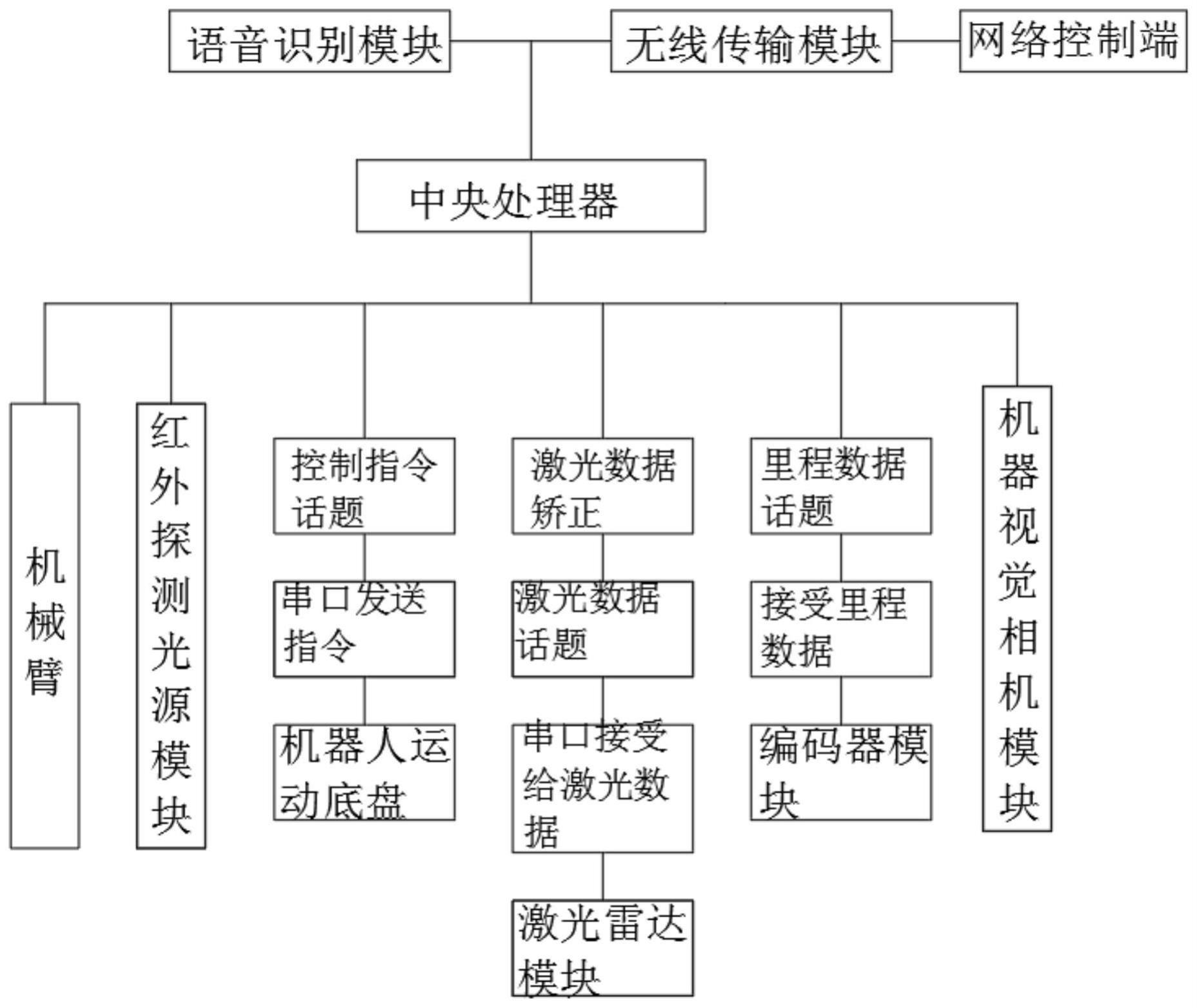
3、一种多功能陪伴助老机器人,包括中央处理器、激光雷达模块、编码器模块、机器视觉相机模块、红外探测光源模块、无线传输模块、语音识别模块、机器人运动底盘、机械臂、网络控制端;
4、所述语音识别模块、机械臂、机器人运动底盘、激光雷达模块、编码器模块、机器视觉相机模块均与中央处理器电信号连接,所述网络控制端通过无线传输模块与中央处理器无线电信号连接。
5、作为本技术方案的进一步改进方案:所述语音识别模块用于自动采集并识别语音信号,然后将识别出的语音信号发送到中央处理器中。
6、作为本技术方案的进一步改进方案:所述中央处理器用于通过机器视觉相机模块主动监测老人的体位信息判断老人是否跌倒,是否发生危险。
7、作为本技术方案的进一步改进方案:所述红外探测光源模块采用bx-dr0-250-100-w与bx-p-kzq-2的大尺寸环形红外光源,所述红外探测光源模块能够与机器视觉相机模块配合,实现相机的摄像采集过程中,保证视场内光照的稳定,避免外界光的影响。
8、作为本技术方案的进一步改进方案:所述激光雷达模块采用rplidara1激光雷达,用于帮助机器人在室内移动时实现地图构建、路径规划和避障功能。
9、作为本技术方案的进一步改进方案:所述编码器模块用于检测机器人移动的位移。
10、作为本技术方案的进一步改进方案:所述机器视觉相机模块采用mv-ch250-21gm-f-nf相机。
11、作为本技术方案的进一步改进方案:所述机器人运动底盘用于控制机器人移动。
12、作为本技术方案的进一步改进方案:所述无线传输模块采用esp8266wifi模块。
13、作为本技术方案的进一步改进方案:所述中央处理器为stm32f405rgt6开发板。
14、与现有技术相比,本发明的有益效果是:
15、本发明基于机器视觉,自动寻路,无线信号等功能,能有效保障老人的安全,实现多种多样的功能来服务于老人满足老人的陪伴需求,并且基于该机器人的功能,可将其的应用场景得到延申,实现社会的广泛需求。
16、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种多功能陪伴助老机器人,其特征在于,包括中央处理器、激光雷达模块、编码器模块、机器视觉相机模块、红外探测光源模块、无线传输模块、语音识别模块、机器人运动底盘、机械臂、网络控制端;
2.根据权利要求1所述的一种多功能陪伴助老机器人,其特征在于,所述语音识别模块用于自动采集并识别语音信号,然后将识别出的语音信号发送到中央处理器中。
3.根据权利要求2所述的一种多功能陪伴助老机器人,其特征在于,所述中央处理器用于通过机器视觉相机模块主动监测老人的体位信息判断老人是否跌倒,是否发生危险。
4.根据权利要求3所述的一种多功能陪伴助老机器人,其特征在于,所述红外探测光源模块采用bx-dr0-250-100-w与bx-p-kzq-2的大尺寸环形红外光源,所述红外探测光源模块能够与机器视觉相机模块配合,实现相机的摄像采集过程中,保证视场内光照的稳定,避免外界光的影响。
5.根据权利要求4所述的一种多功能陪伴助老机器人,其特征在于,所述激光雷达模块采用rplidara1激光雷达,用于帮助机器人在室内移动时实现地图构建、路径规划和避障功能。
6.根据权利要求5所述的一种多功能陪伴助老机器人,其特征在于,所述编码器模块用于检测机器人移动的位移。
7.根据权利要求6所述的一种多功能陪伴助老机器人,其特征在于,所述机器视觉相机模块采用mv-ch250-21gm-f-nf相机。
8.根据权利要求7所述的一种多功能陪伴助老机器人,其特征在于,所述机器人运动底盘用于控制机器人移动。
9.根据权利要求8所述的一种多功能陪伴助老机器人,其特征在于,所述无线传输模块采用esp8266wifi模块。
10.根据权利要求9所述的一种多功能陪伴助老机器人,其特征在于,所述中央处理器为stm32f405rgt6开发板。
技术总结
本发明公开了一种多功能陪伴助老机器人,包括中央处理器、激光雷达模块、编码器模块、机器视觉相机模块、红外探测光源模块、无线传输模块、语音识别模块、机器人运动底盘、机械臂、网络控制端;所述语音识别模块、机械臂、机器人运动底盘、激光雷达模块、编码器模块、机器视觉相机模块均与中央处理器电信号连接,所述网络控制端通过无线传输模块与中央处理器无线电信号连接。本发明基于机器视觉,自动寻路,无线信号等功能,能有效保障老人的安全,实现多种多样的功能来服务于老人满足老人的陪伴需求,并且基于该机器人的功能,可将其的应用场景得到延申,实现社会的广泛需求。
技术研发人员:宋博岩,马阳璞,徐中德,王一吉,蔡宗佑,包宏阳,刘晓辉,苗成亮
受保护的技术使用者:宋博岩
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!