关节机械臂及超声诊断设备的制作方法
本发明涉及医疗设备,特别涉及一种关节机械臂及超声诊断设备。
背景技术:
1、超声诊断设备是一种利用超声波在人体内部产生回波的原理,通过对回波信号进行处理和显示,来观察人体内部组织结构和血流情况的医疗仪器。超声诊断设备通常包括超声探头、主机、显示器等部件。超声探头是用于发射和接收超声波的部件,主机是用于对回波信号进行放大、滤波、数字化等处理的部件,显示器是用于将处理后的信号以图像或曲线的形式显示出来的部件。
2、为了方便医生对不同部位的病灶进行检查,超声诊断设备通常需要对显示器进行调节,使其能够在不同的角度和位置显示图像。为此,一些超声诊断设备采用了一种关节机械臂来连接显示器和主机,使得显示器可以在水平方向和垂直方向上进行旋转和平移。同时为了防止在运输或者使用的过程中,在暴力移动或者运输的外力影响下,可能会使关节机械臂被迫转动或俯仰运动,从而导致超声诊断设备不受控制而产生磕碰或损坏等危害,因此现有还通常设置有用于将关节机械臂的运动方向进行限制的功能,以方便运输、移动及使用。
3、然而,现有的关节机械臂通常存在一些以下缺陷:现有关节机械臂由于内部结构需要运动,因此锁付柱子需要进行垂直放置,然而锁付柱子的运动行程较大,为了防止结构发生干涉,因此需要占用关节机械臂的内部结构空间较大,使得关节机械臂显得较为庞大。同时现有关节机械臂采用旋转方式进行开锁及解锁;其通过顺时针或逆时针进行解锁或者上锁,然而使用人员使用时不太注意经常会拧错,即使有标识也不会特别关注到,当经常拧错用力过猛时会损坏结构,同时现有旋转方式的关节机械臂的结构还比较复杂。
技术实现思路
1、基于此,本发明的目的是提供一种关节机械臂及超声诊断设备,以从根本上解决现有关节机械臂中锁付与解锁结构可靠性低和机身厚大的问题。
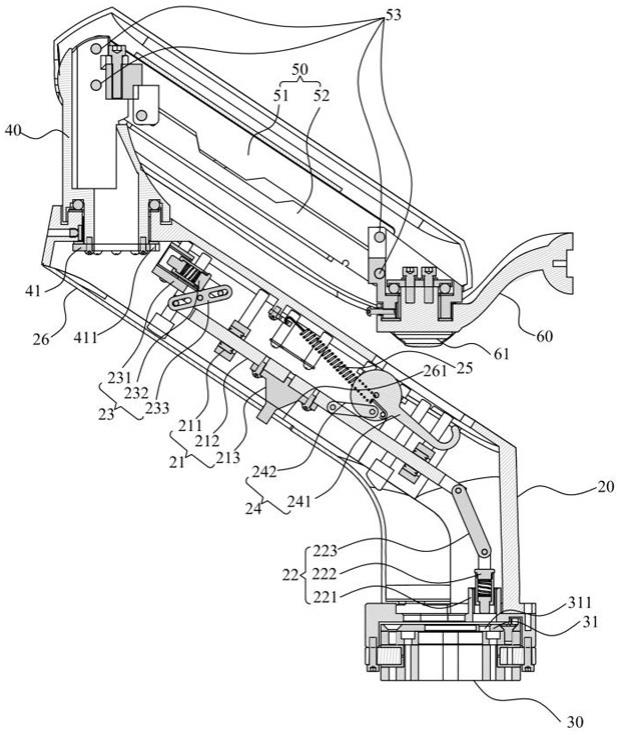
2、根据本发明实施例的一种关节机械臂,包括:支臂底座、分别与所述支臂底座两端连接的底座旋转关节和中间旋转关节、与所述中间旋转关节一端转动连接的上支臂、及与所述上支臂一端转动连接的显示器转接支架;
3、所述支臂底座中设有进行滑动控制的锁付开关机构,所述底座旋转关节、所述中间旋转关节及所述显示器转接支架分别设有所述锁付开关机构进行锁付时所对应的限位结构;
4、所述锁付开关机构包括进行滑动运动的主动件、分别与所述主动件两端连接且用于将滑动运动先转换为旋转运动再转换为滑动运动的第一从动件和第二从动件、及与所述主动件连接且用于将滑动运动转换为旋转运动的第三从动件;
5、所述锁付开关机构中的所述主动件进行滑动锁付时,所述第一从动件、所述第二从动件及所述第三从动件分别与所述底座旋转关节、所述中间旋转关节及所述显示器转接支架中所对应的限位结构进行限位。
6、另外,根据本发明上述实施例的一种关节机械臂,还可以具有如下附加的技术特征:
7、进一步地,所述锁付开关机构还包括分别与所述支臂底座和所述第三从动件连接且用于当所述第三从动件旋转至预设位置时提供自锁力的自锁件。
8、进一步地,所述主动件包括与所述支臂底座固定的锁付滑动轴承、在所述锁付滑动轴承内进行滑动的锁付平移杆、以及与所述锁付平移杆固定的滑动开关。
9、进一步地,所述第一从动件包括与所述支臂底座固定的锁付下支架、在所述锁付下支架的滑槽内进行滑动的下锁付柱子、以及与所述下锁付柱子通过转轴连接的锁付下转动板,所述锁付下转动板的一端通过转轴与所述锁付平移杆连接。
10、进一步地,所述第二从动件包括与所述支臂底座固定的锁付上支架、在所述锁付上支架的滑槽内进行滑动的上锁付柱子、以及与所述锁付上支架通过转轴连接的锁付上转动板,所述锁付上转动板的中心点通过转轴连接于所述锁付上支架,所述锁付上转动板的两端分别设有与所述上锁付柱子及所述锁付平移杆连接的两个条形通孔,所述上锁付柱子及所述锁付平移杆分别通过转轴在对应的条形通孔内滑动。
11、进一步地,所述第三从动件包括与所述支臂底座通过转轴连接的挂钩、及与所述挂钩通过转轴连接的挂钩推杆,所述挂钩推杆的一端通过转轴与所述锁付平移杆连接。
12、进一步地,所述下锁付柱子包括与所述锁付下支架的滑槽进行滑动连接的锁付柱子滑柱、设置在所述锁付柱子滑柱内进行滑动且可伸出于所述锁付柱子滑柱底部的锁付柱子弹柱、设置在所述锁付柱子滑柱内与所述锁付柱子弹柱连接的弹性件、以及与所述锁付柱子滑柱顶部连接的锁付柱子端盖。
13、进一步地,所述底座旋转关节上设置有限位板,所述限位板上设有第一限位孔;所述中间旋转关节上设有限位法兰,所述限位法兰上设有第二限位孔;所述显示器转接支架上设有限位槽。
14、进一步地,所述支臂底座的后侧设有支臂后盖,所述支臂后盖上设有限制所述主动件的移动位置的第三限位孔。
15、本发明另一实施例的目的还在于提供一种超声诊断设备,包括如上述所述的关节机械臂。
16、本发明实施例提供的关节机械臂,通过设置在支臂底座两端的底座旋转关节和中间旋转关节,使得可以实现底座旋转关节和中间旋转关节的水平旋转,通过设置与中间旋转关节一端转动连接的上支臂、及与上支臂一端转动连接的显示器转接支架,使得可以实现显示器转接支架的水平旋转及上下移动,通过在支臂底座设置锁付开关机构,而在底座旋转关节、中间旋转关节及显示器转接支架分别设有锁付开关机构进行锁付时所对应的限位结构使得可以由锁付开关机构进行锁付及解锁;而通过在锁付开关机构中将主动件设置为滑动运动,而将各个从动件设置为先旋转运动再滑动运动或先旋转运动再旋转运动,使得每个上锁的运动方式都进行了两次运动形式的转换,且都至少进行了旋转运动,使得第一从动件、第二从动件及第三从动件在经旋转运动后的运动不会对支臂底座的内部结构产生干涉,从而不会影响到支臂底座的厚度而使支臂底座的空间大大减小,解决内部空间不足而导致机械臂机身厚大的问题,缩小支臂底座尺寸,同时其整体结构比现有旋转式的机械臂结构更为简单,操作更为便捷,且结构可靠度高,解决了现有关节机械臂中锁付与解锁结构可靠性低和机身厚大的问题。
技术特征:
1.一种关节机械臂,其特征在于,包括:支臂底座、分别与所述支臂底座两端连接的底座旋转关节和中间旋转关节、与所述中间旋转关节一端转动连接的上支臂、及与所述上支臂一端转动连接的显示器转接支架;
2.根据权利要求1所述的关节机械臂,其特征在于,所述锁付开关机构还包括分别与所述支臂底座和所述第三从动件连接且用于当所述第三从动件旋转至预设位置时提供自锁力的自锁件。
3.根据权利要求1所述的关节机械臂,其特征在于,所述主动件包括与所述支臂底座固定的锁付滑动轴承、在所述锁付滑动轴承内进行滑动的锁付平移杆、以及与所述锁付平移杆固定的滑动开关。
4.根据权利要求3所述的关节机械臂,其特征在于,所述第一从动件包括与所述支臂底座固定的锁付下支架、在所述锁付下支架的滑槽内进行滑动的下锁付柱子、以及与所述下锁付柱子通过转轴连接的锁付下转动板,所述锁付下转动板的一端通过转轴与所述锁付平移杆连接。
5.根据权利要求3所述的关节机械臂,其特征在于,所述第二从动件包括与所述支臂底座固定的锁付上支架、在所述锁付上支架的滑槽内进行滑动的上锁付柱子、以及与所述锁付上支架通过转轴连接的锁付上转动板,所述锁付上转动板的中心点通过转轴连接于所述锁付上支架,所述锁付上转动板的两端分别设有与所述上锁付柱子及所述锁付平移杆连接的两个条形通孔,所述上锁付柱子及所述锁付平移杆分别通过转轴在对应的条形通孔内滑动。
6.根据权利要求3所述的关节机械臂,其特征在于,所述第三从动件包括与所述支臂底座通过转轴连接的挂钩、及与所述挂钩通过转轴连接的挂钩推杆,所述挂钩推杆的一端通过转轴与所述锁付平移杆连接。
7.根据权利要求4所述的关节机械臂,其特征在于,所述下锁付柱子包括与所述锁付下支架的滑槽进行滑动连接的锁付柱子滑柱、设置在所述锁付柱子滑柱内进行滑动且可伸出于所述锁付柱子滑柱底部的锁付柱子弹柱、设置在所述锁付柱子滑柱内与所述锁付柱子弹柱连接的弹性件、以及与所述锁付柱子滑柱顶部连接的锁付柱子端盖。
8.根据权利要求1所述的关节机械臂,其特征在于,所述底座旋转关节上设置有限位板,所述限位板上设有第一限位孔;所述中间旋转关节上设有限位法兰,所述限位法兰上设有第二限位孔;所述显示器转接支架上设有限位槽。
9.根据权利要求1所述的关节机械臂,其特征在于,所述支臂底座的后侧设有支臂后盖,所述支臂后盖上设有限制所述主动件的移动位置的第三限位孔。
10.一种超声诊断设备,其特征在于,包括权利要求1-9任一项所述的关节机械臂。
技术总结
本发明适用于医疗设备技术领域,提供了一种关节机械臂及超声诊断设备,包括支臂底座、分别与支臂底座两端连接的底座旋转关节和中间旋转关节、与中间旋转关节一端转动连接的上支臂、及与上支臂一端转动连接的显示器转接支架;支臂底座中设有进行滑动控制的锁付开关机构,底座旋转关节、中间旋转关节及显示器转接支架分别设有锁付开关机构进行锁付时所对应的限位结构;锁付开关机构包括进行滑动运动的主动件、分别与主动件两端连接且用于将滑动运动先转换为旋转运动再转换为滑动运动的第一从动件和第二从动件、及与主动件连接且用于将滑动运动转换为旋转运动的第三从动件。本发明解决了现有关节机械臂中锁付与解锁结构可靠性低和机身厚大的问题。
技术研发人员:许永博,彭泽波,闻顺
受保护的技术使用者:深圳华声医疗技术股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!