一种管道清洗机器人的制作方法
本发明属于机械臂控制,具体是指一种管道清洗机器人。
背景技术:
1、管道机器人的运动特点能够完成以下功能;管道机器人的自由度使其身体具有很高的适应性,能够充分的适应各种管道结构,完成在各种管道内的清理作业。例如:在管道中任意前进后退,可以在水平和垂直方向进行转弯;将管道机器人放入实践之中,可以在其端头安装清理、消毒设备,比如毛刷和喷头。能很好的对管道中的污秽以及细菌进行有效的清理,使人们在使用时更加卫生安全。
2、目前现有的管道清洗机器人存在以下问题:
3、现有的清洗机械臂大多设置有毛刷对管道内壁附着的污垢进行清除,采用这种方式的弊端为,其一,采用软材料制作的刷子,难以对管道内壁附着程度较大的污垢进行清除,其二,采用硬质材料制作的刷子,容易刮伤管道内壁,导致管道本体结构遭到破坏;而且,无论是采用硬质材料刷毛还是软质材料刷毛,当遇到开口较小的管道时,机械臂难以携带刷毛进入管道内部进行清理作业,导致现有的机械臂适应能力较弱,难以满足现有的采用机械臂对管道的清洗需求。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本方案提供了一种能够改变刷毛长度,使刷毛在缩短的状态下可以轻松的通过管口,并在进入到管道内部后可以张开对其内壁存在的污垢进行适应性清理的管道清洗机器人。
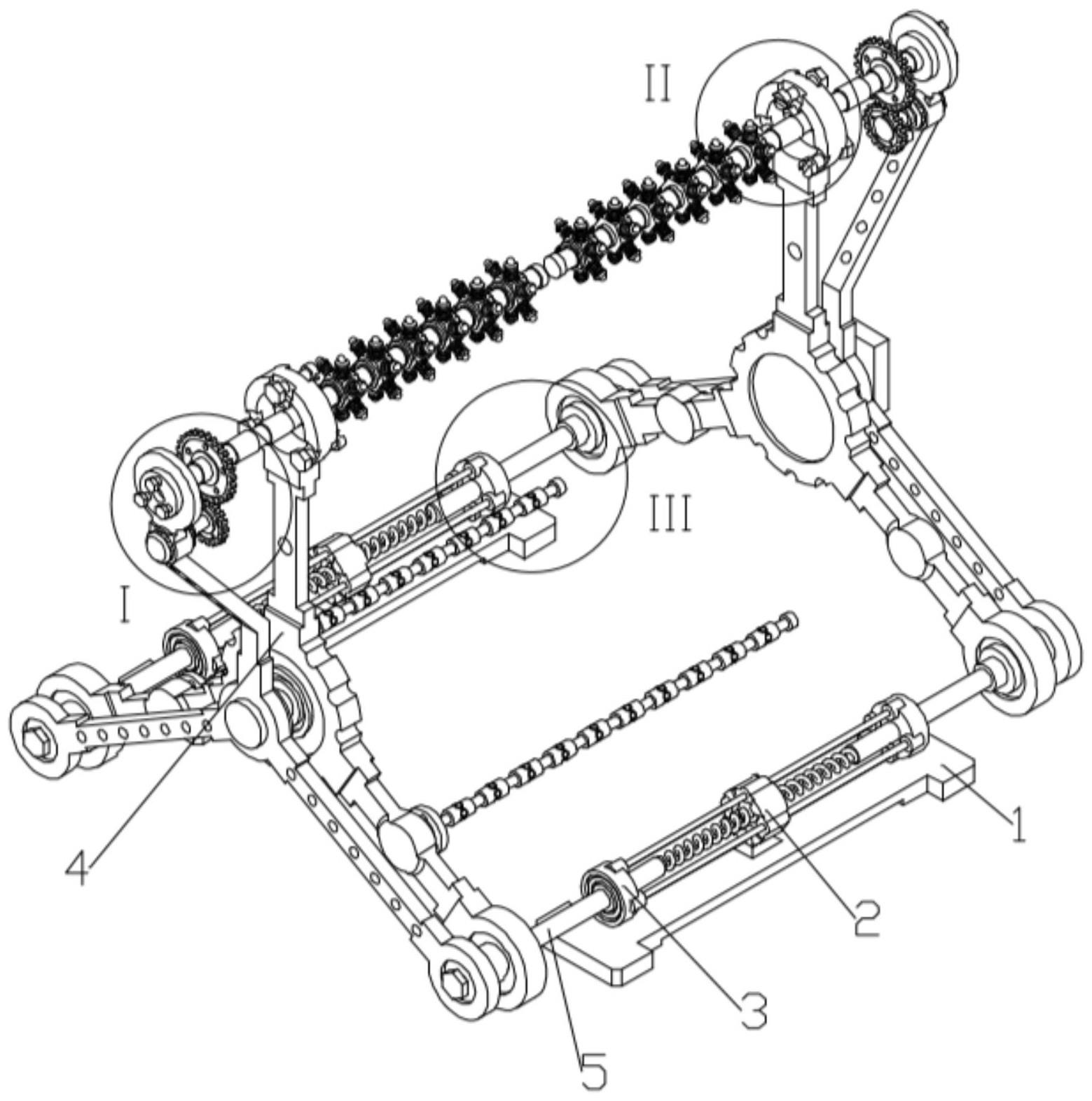
2、本方案提出的一种管道清洗机器人,包括机械固定板、导向块、导向架、三角臂管道夹持机构和双套臂程序控制机构,所述导向块设于机械固定板上壁,所述导向架对称设于导向块两侧,所述三角臂管道夹持机构设于导向架上,所述双套臂程序控制机构设于三角臂管道夹持机构上,所述三角臂管道夹持机构包括内三角扩张机构和外三角驱动机构,所述内三角扩张机构设于导向架远离导向块的一侧,所述外三角驱动机构设于内三角扩张机构远离导向架的一侧,所述双套臂程序控制机构包括外套清洗机构和内套控制机构,所述外套清洗机构设于内三角扩张机构远离机械固定板的一端,所述内套控制机构设于内三角扩张机构远离外三角驱动机构的一侧。
3、作为本案方案进一步的优选,所述内三角扩张机构包括导向弹簧、导向柱、内三角板、管道口、夹持杆、夹管块、内驱电磁体和内驱磁体,所述导向弹簧对称设于导向块两侧,所述导向柱贯穿设于导向架远离导向块的一端,导向弹簧远离导向块的一侧设于导向柱侧壁,所述内三角板设于导向柱远离导向弹簧的一侧,所述管道口设于内三角板远离导向柱的一端,多组所述夹持杆贯穿设于管道口外侧的内三角板侧壁,所述夹管块设于夹持杆一侧,夹管块相对设置,所述内驱电磁体设于导向柱外侧的导向架侧壁,所述内驱磁体设于导向柱外侧的内三角板侧壁,内驱电磁体与内驱磁体相对设置;所述外三角驱动机构包括外滑杆、外三角板、电机座、驱动电机、驱动轴、驱动齿轮、连接弹簧、外驱电磁体和外驱磁体,所述外滑杆贯穿内三角板滑动设于导向柱内部,所述外三角板设于外滑杆远离导向柱的一端,所述电机座设于外三角板远离外滑杆的一端,所述驱动电机设于电机座内部,所述驱动轴设于驱动电机动力端,所述驱动齿轮设于驱动轴远离驱动电机的一端,所述连接弹簧设于外三角板与内三角板之间,所述外驱电磁体设于内三角板靠近外三角板的一侧,所述外驱磁体设于外三角板靠近内三角板的一侧,外驱电磁体与外驱磁体相对设置。
4、使用时,将待清洗的管道放入到夹管块之间,内驱电磁体通电产生磁性,内驱电磁体与内驱磁体同极设置,内驱电磁体固定在导向架侧壁通过斥力推动内驱磁体,内驱磁体通过内三角板带动导向柱沿导向架内部滑动,导向弹簧形变,内三角板相背运动,夹管块之间的间距扩大,随后,外驱电磁体通电产生磁性,外驱电磁体与外驱磁体同极设置,外驱电磁体固定在内三角板侧壁通过斥力推动外三角板,连接弹簧弹性形变,外三角板通过外滑杆沿导向柱内部滑动,外三角板远离内三角板侧壁,管道放置到夹管块之间,内驱电磁体断电消磁,导向弹簧形变复位通过导向柱带动内三角板相对运动,内三角板带动夹管块相对运动对管道进行夹持固定,外驱电磁体断电消磁,连接弹簧弹性复位带动外三角板靠近内三角板侧壁。
5、优选地,所述外套清洗机构包括清洗机械臂、六角分导块、导磁口、收放弹簧、清理磁体、摩擦球和从动齿轮,所述清洗机械臂贯穿管道口转动设于外三角板靠近驱动电机的一端侧壁,清洗机械臂为一端开口设置,多组所述六角分导块设于清洗机械臂远离驱动电机的一端,所述导磁口分别设于六角分导块和清洗机械臂上,所述收放弹簧设于导磁口外侧的六角分导块侧壁,所述清理磁体设于收放弹簧远离六角分导块的一侧,所述摩擦球设于清理磁体远离收放弹簧的一侧,所述从动齿轮设于清洗机械臂靠近驱动齿轮的一端,从动齿轮与驱动齿轮相啮合;所述内套控制机构包括拆卸磁体、内插板、内插杆、凹槽、控径环形电磁体、内插螺纹孔、微型测距传感器、锁定螺栓和测距口,所述拆卸磁体对称设于内三角板两端侧壁,所述内插板设于拆卸磁体侧壁,拆卸磁体通过磁力吸附内插板,所述内插杆设于内插板远离拆卸磁体的一侧,多组所述凹槽设于内插杆外侧,凹槽为一端开口设置,所述控径环形电磁体设于凹槽内部,所述内插螺纹孔设于内插板侧壁,所述微型测距传感器设于控径环形电磁体内部的凹槽内壁,所述测距口设于摩擦球上,测距口与微型测距传感器同轴水平设置,所述锁定螺栓贯穿设于外三角板远离清洗机械臂的一侧,锁定螺栓与外三角板螺纹连接。
6、使用时,外三角板通过连接弹簧的弹性复位带动清洗机械臂插入到管道内部,由于管道内径不统一,需要对清理刷的长度进行调节,此时,将内插板从拆卸磁体侧壁拿下,锁定螺栓旋出外三角板内部,内插杆贯穿外三角板插入到清洗机械臂内部,通过锁定螺栓摆正内插杆与导磁口的对应位置,锁定螺栓贯穿内插螺纹孔旋入到外三角板内部,内插板被固定在外三角板侧壁,凹槽与导磁口同轴设置,控径环形电磁体通电产生磁性,控径环形电磁体与拆卸磁体同极设置,初始状态下收放弹簧为缩短状态,控径环形电磁体固定在凹槽内部通过斥力推动清理磁体,清理磁体通过收放弹簧形变带动摩擦球与管道内壁贴合,微型测距传感器测距端发射信号贯穿测距口对管道的管径进行测量,通过微型测距传感器测量出的管道管径的长度与管道的生产尺寸进行比对,可以准确的得出需要清理的管道内壁的污垢厚度,驱动电机动力端带动驱动轴转动,驱动轴带动驱动齿轮转动,驱动齿轮与从动齿轮相啮合,驱动齿轮通过从动齿轮带动清洗机械臂绕外三角板侧壁转动对管道内壁进行摩擦清理。
7、具体地,所述外三角板侧壁设有控制器。
8、其中,所述控制器分别与驱动电机、外驱电磁体、控径环形电磁体、微型测距传感器和内驱电磁体电性连接。
9、优选地,所述微型测距传感器的型号为hg-c1030。
10、进一步地,所述控制器的型号为syc89c52rc-401。
11、采用上述结构本方案取得的有益效果如下:
12、与现有技术相比,本方案采用三段机械臂的设置,在程序的操控下,能够完成对具有不同管径内壁的管道内部的污垢进行有效的清除,并且在测距口的设置下,通过微型测距传感器测距端的贯穿测距,能够准确的得出对管道内部污垢的清理厚度,实时的对污垢的去除量进行监测,能够避免对管道本身结构造成破坏,大大的提高了清洗机械臂的操作精准性能,需要对清理刷的长度进行调节,此时,将内插板从拆卸磁体侧壁拿下,锁定螺栓旋出外三角板内部,内插杆贯穿外三角板插入到清洗机械臂内部,通过锁定螺栓摆正内插杆与导磁口的对应位置,锁定螺栓贯穿内插螺纹孔旋入到外三角板内部,内插板被固定在外三角板侧壁,凹槽与导磁口同轴设置,控径环形电磁体通电产生磁性,控径环形电磁体与拆卸磁体同极设置,初始状态下收放弹簧为缩短状态,控径环形电磁体固定在凹槽内部通过斥力推动清理磁体,清理磁体通过收放弹簧形变带动摩擦球与管道内壁贴合,微型测距传感器测距端发射信号贯穿测距口对管道的管径进行测量,通过微型测距传感器测量出的管道管径的长度与管道的生产尺寸进行比对,可以准确的得出需要清理的管道内壁的污垢厚度。
- 还没有人留言评论。精彩留言会获得点赞!