一种管材用机器人抓手元件
本发明涉及机器人抓手,特别涉及一种管材用机器人抓手元件。
背景技术:
1、随着我国国民经济快速发展,基础建设爆发式增长,对管材的需求越来越多,因此我国管材的产量日益增多,而在工厂进行管材的生产时,通常需要使用专用的运输管材产品的转运装置。
2、公开号为cn116553164a的一种管材抓取转运装置,至少一移动件与导向轨活动连接,第一伸缩件与移动件相连接,安装架与第一伸缩件活动端相连接,两抓取机构分别设置于安装架的相对两侧,一抓取机构包括设置于安装架一侧的调节单元,以及与调节单元相连接的抓取单元,通过两调节单元可分别驱动两抓取单元相靠近或者远离,以调节两抓取单元分别与管材上的两个抓取孔一一对应,供于两抓取单元能够分别与管材的两个抓取孔相配合以固定抓取管材。解决了现有技术中不同长度管材上的两抓取孔之间的距离不同,抓取转运装置不具备调节功能,不便于与两抓取孔相配合,对不同长度的管材进行抓取的问题。
3、公开号为cn105947666a的一种用于管材转运的机器人手臂,包括丝杆支座及设置在所述的丝杆支座上方的丝杆,在所述的丝杆支座一侧设置有与丝杆相连接的丝杆驱动电机,在所述的丝杆上设置有移动套筒,在所述的移动套筒上设置有连杆支座,所述的连杆支座与所述的移动套筒上端面向垂直,在所述的连杆支座上设置有转轴,所述的转轴通过轴承转动连接在所述的连杆支座上,在所述的转轴上设置有连杆;本发明可以作为管材加工时的机器人手臂使用,通过采用丝杆结构,实现整体结构的移动,从而可以将设置有吸盘的液压缸置于管材内部,通过转动连杆,即可实现将管材从一个输送线路转移到平行线路上,操作简单,并且不损坏管材表面。
4、上述技术方案可以实现对管材的抓取和转移,但是,其仅适用于规则管材,而对于不规则管材进行抓取时,难以保证抓取的稳定性,且不能根据加工或堆放的要求在抓取过程中对管材进行调整。
5、因此,发明一种管材用机器人抓手元件来解决上述问题很有必要。
技术实现思路
1、本发明的目的在于提供一种管材用机器人抓手元件,以解决上述背景技术中提出的问题。
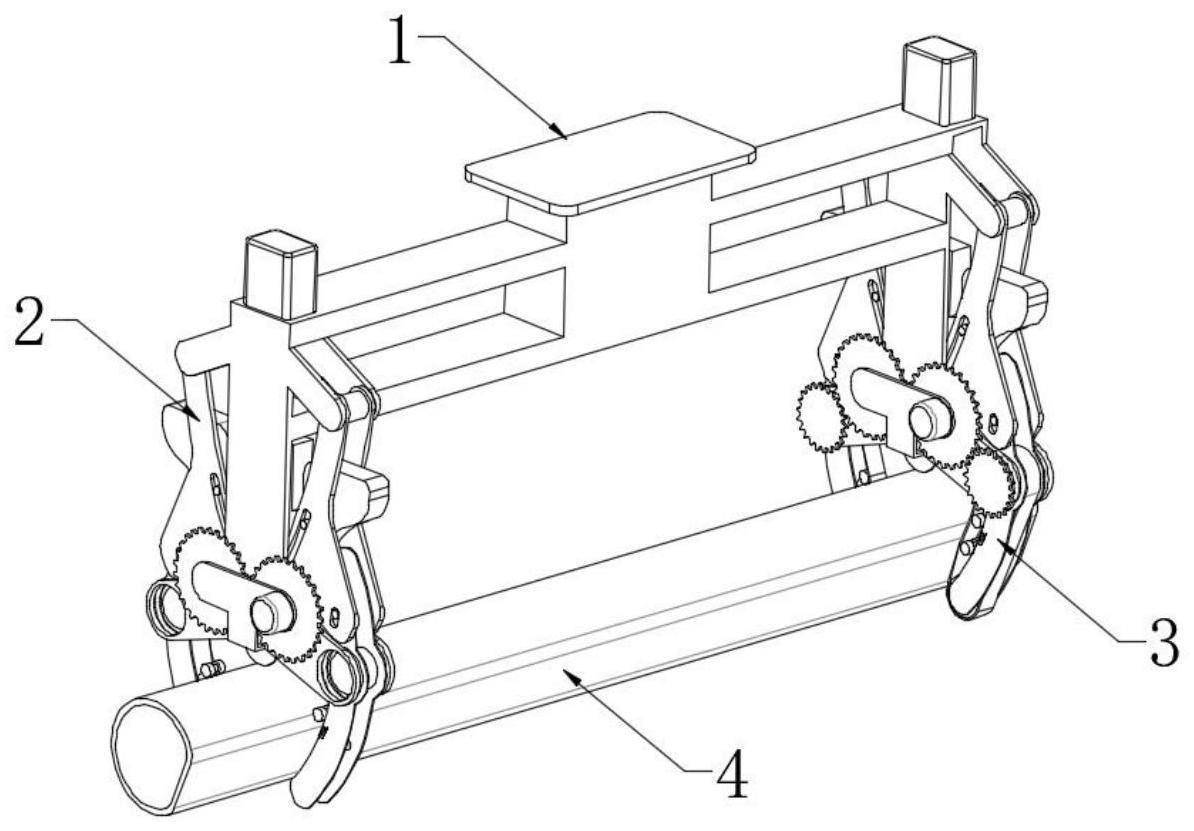
2、为实现上述目的,本发明提供如下技术方案:一种管材用机器人抓手元件,包括安装架、驱动机构、抓手机构以及管材本体,所述驱动机构设置有两组,且两组驱动机构分别设置于安装架的两端,所述抓手机构设置有四组,且四组抓手机构两两设置于两组驱动机构的两侧底端;
3、所述驱动机构包括支撑架,所述支撑架固定设置于安装架的一端,所述支撑架的两侧底端均固定设置有延伸架;
4、所述抓手机构包括活动臂,所述活动臂设置为弧形结构,且活动臂中部通过销轴活动设置于延伸架的底端。
5、优选的,所述支撑架的内部底端设置有滑座,所述滑座的底端固定设置有活动块,所述活动块设置于两个延伸架之间,所述活动块的一端设置有贴合轮,且贴合轮与管材本体的外侧壁相贴合。
6、优选的,所述滑座的两侧均固定设置有延伸块,所述延伸块的外侧设置为弧形结构,且弧形结构与活动臂的一端相贴合,所述延伸块的外侧壁固定设置有滑杆,所述延伸块的两侧均设置有传动板,所述传动板的中部贯穿设置有弧形结构的滑槽,所述滑杆贯穿设置于滑槽的内部,所述传动板的一端贯穿设置有条形结构的通槽,所述通槽的内部贯穿设置有滑块,且滑块的一端固定设置于活动臂的外侧壁。
7、优选的,所述传动板的一端固定设置有连接臂,所述连接臂的一端通过销轴活动设置有固定板,且固定板固定设置于支撑架的外侧壁顶端。
8、优选的,所述滑座的顶端固定设置有定位架,所述定位架中部开设的螺孔内贯穿设置有调节螺杆,所述调节螺杆的一端设置有调节电机,且调节电机固定设置于支撑架的顶端。
9、优选的,所述活动臂的中部贯穿设置有圆形槽,所述圆形槽的内部贯穿设置有活动管,所述活动管的一端固定设置有传动轮,且传动轮通过轴承活动设置于活动臂的中部,所述活动臂的一端设置有辅助轮,且辅助轮与传动轮之间设置有橡胶带。
10、优选的,所述活动臂的内部设置有活动座,所述活动座的顶端活动设置有销杆,且销杆固定设置于活动臂的内壁,所述活动座的两侧底端均通过销轴活动设置有支撑臂,所述支撑臂的一端设置有支撑轮,且支撑轮与橡胶带的内壁相贴合。
11、优选的,所述支撑臂的内侧中部通过销轴活动设置有连接块,两个所述连接块之间设置有拉簧。
12、优选的,所述活动管的一端固定设置有传动齿轮,所述传动齿轮的一侧设置有驱动齿轮,且两个驱动齿轮相啮合,所述驱动齿轮的外侧设置有支撑座,且支撑座固定设置于支撑架的外侧,所述支撑座的外侧壁一端固定设置有驱动电机,且驱动电机的输出轴与一个驱动齿轮的中部固定连接。
13、优选的,所述橡胶带的外侧壁设置有半球形结构的凸起。
14、本发明的技术效果和优点:
15、1、本发明通过设置安装架,安装架的两端均设置有驱动机构和抓手机构,驱动机构可以对抓手机构进行驱动,而抓手机构可以实现对管材的抓取,通过在抓手机构上设置橡胶带,橡胶带的内侧设置有支撑轮,支撑轮可以将橡胶带向外撑开,在对不规则管材进行抓取时,支撑轮和橡胶带可以在管材的挤压下进行自适应调整,以提升装置对不规则管材的抓取稳定性;
16、2、本发明通过设置驱动结构和抓手机构,驱动结构包括可以水平滑动的滑座,滑座的一端设置有用于顶紧管材的活动块,抓手机构包括活动臂,活动臂可以从两侧将管材夹紧,而活动块可以将管材从内向外顶紧,活动块与活动臂配合,可以从多个角度实现对管材的夹紧,以保证装置对管材抓取的稳定性;
17、3、本发明通过设置抓手机构,抓手机构包括活动臂,活动臂的外侧设置有橡胶带,活动臂在将管材夹紧的过程中,橡胶带与管材的外侧壁紧密贴合,在需要转动管材以便于加工或码放时,通过驱动电机以及齿轮等结构可以带动橡胶带转动,而橡胶带可以带动管材转动,以实现对管材的调整。
技术特征:
1.一种管材用机器人抓手元件,其特征在于,包括安装架(1)、驱动机构(2)、抓手机构(3)以及管材本体(4),所述驱动机构(2)设置有两组,且两组驱动机构(2)分别设置于安装架(1)的两端,所述抓手机构(3)设置有四组,且四组抓手机构(3)两两设置于两组驱动机构(2)的两侧底端;
2.根据权利要求1所述的一种管材用机器人抓手元件,其特征在于:所述支撑架(201)的内部底端设置有滑座(203),所述滑座(203)的底端固定设置有活动块(204),所述活动块(204)设置于两个延伸架(202)之间,所述活动块(204)的一端设置有贴合轮,且贴合轮与管材本体(4)的外侧壁相贴合。
3.根据权利要求2所述的一种管材用机器人抓手元件,其特征在于:所述滑座(203)的两侧均固定设置有延伸块(205),所述延伸块(205)的外侧设置为弧形结构,且弧形结构与活动臂(301)的一端相贴合,所述延伸块(205)的外侧壁固定设置有滑杆(206),所述延伸块(205)的两侧均设置有传动板(207),所述传动板(207)的中部贯穿设置有弧形结构的滑槽(208),所述滑杆(206)贯穿设置于滑槽(208)的内部,所述传动板(207)的一端贯穿设置有条形结构的通槽(209),所述通槽(209)的内部贯穿设置有滑块(302),且滑块(302)的一端固定设置于活动臂(301)的外侧壁。
4.根据权利要求3所述的一种管材用机器人抓手元件,其特征在于:所述传动板(207)的一端固定设置有连接臂(210),所述连接臂(210)的一端通过销轴活动设置有固定板(211),且固定板(211)固定设置于支撑架(201)的外侧壁顶端。
5.根据权利要求4所述的一种管材用机器人抓手元件,其特征在于:所述滑座(203)的顶端固定设置有定位架(212),所述定位架(212)中部开设的螺孔内贯穿设置有调节螺杆(213),所述调节螺杆(213)的一端设置有调节电机(214),且调节电机(214)固定设置于支撑架(201)的顶端。
6.根据权利要求1所述的一种管材用机器人抓手元件,其特征在于:所述活动臂(301)的中部贯穿设置有圆形槽(303),所述圆形槽(303)的内部贯穿设置有活动管(304),所述活动管(304)的一端固定设置有传动轮(305),且传动轮(305)通过轴承活动设置于活动臂(301)的中部,所述活动臂(301)的一端设置有辅助轮(306),且辅助轮(306)与传动轮(305)之间设置有橡胶带(307)。
7.根据权利要求6所述的一种管材用机器人抓手元件,其特征在于:所述活动臂(301)的内部设置有活动座(308),所述活动座(308)的顶端活动设置有销杆(309),且销杆(309)固定设置于活动臂(301)的内壁,所述活动座(308)的两侧底端均通过销轴活动设置有支撑臂(310),所述支撑臂(310)的一端设置有支撑轮(311),且支撑轮(311)与橡胶带(307)的内壁相贴合。
8.根据权利要求7所述的一种管材用机器人抓手元件,其特征在于:所述支撑臂(310)的内侧中部通过销轴活动设置有连接块(312),两个所述连接块(312)之间设置有拉簧。
9.根据权利要求8所述的一种管材用机器人抓手元件,其特征在于:所述活动管(304)的一端固定设置有传动齿轮(313),所述传动齿轮(313)的一侧设置有驱动齿轮(314),且两个驱动齿轮(314)相啮合,所述驱动齿轮(314)的外侧设置有支撑座(315),且支撑座(315)固定设置于支撑架(201)的外侧,所述支撑座(315)的外侧壁一端固定设置有驱动电机(316),且驱动电机(316)的输出轴与一个驱动齿轮(314)的中部固定连接。
10.根据权利要求6所述的一种管材用机器人抓手元件,其特征在于:所述橡胶带(307)的外侧壁设置有半球形结构的凸起。
技术总结
本发明公开了一种管材用机器人抓手元件,涉及到机器人抓手技术领域,包括安装架、驱动机构、抓手机构以及管材本体,所述驱动机构设置有两组,且两组驱动机构分别设置于安装架的两端,所述抓手机构设置有四组,且四组抓手机构两两设置于两组驱动机构的两侧底端。本发明通过设置安装架,安装架的两端均设置有驱动机构和抓手机构,驱动机构可以对抓手机构进行驱动,而抓手机构可以实现对管材的抓取,通过在抓手机构上设置橡胶带,橡胶带的内侧设置有支撑轮,支撑轮可以将橡胶带向外撑开,在对不规则管材进行抓取时,支撑轮和橡胶带可以在管材的挤压下进行自适应调整,以提升装置对不规则管材的抓取稳定性。
技术研发人员:陶国正,张士博,周辉锋,虞文武,刘莱蕾
受保护的技术使用者:常州机电职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!