一种机械手手眼标定方法、系统和可读存储介质与流程
申请涉及数据处理和数据传输领域,更具体的,涉及一种机械手手眼标定方法、系统和可读存储介质。
背景技术:
1、近年来,外科手术已逐渐转为微创手术(mis),主要是利用小孔径的切口或是人体孔进行手术,尽可能减少对患者的创伤,这种手术方式由于伤口面积小,对于病患而言有恢复时间短、降低并发症风险、失血和减少疼痛等优点。机器人辅助微创手术(rmis)使用远程操作平台来控制手术器械,从而增强外科医生的可操作性,降低手术人为失误率,并且,这种装置通常会引入计算机辅助干预(cai),利用计算机在术前计算出手术规划指引,并于术中成像叠加到视频反馈源上监控手术流程,以确保手术的角度与深度正确,同时增强皮肉组织表面下结构和功能解剖信息的可视化。
2、计算机辅助干预是利用正运动学与变换关系将计算机运算后的3d信息从场景投影到相机视图中,很大程度地依赖机械手与相机的手眼标定精度,因此确保手眼标定精度是相当重要的,然而,尽管现有的手眼标定方法相当成熟,精度已满足许多实际应用场景的需求,但是对于机器人辅助微创手术而言却仍有障碍。以操作层面来说,若能提供相机与机械手足够范围的三维空间获取标定板图像,并且在图相清晰可见的情况下尽可能的采集6自由度的位姿数据,此时计算出的标定矩阵具有良好的泛化性,并且精度较高。由上述可知,微创手术主要是利用小孔径的切口进行手术,因此手术机器人在设计时往往会受到结构的限制,只能在远程运动中心(rcm)周围运动,以确保患者伤口能限制在小区域内,这限制了机械手从原本的6自由度降为4自由度(仅能三维旋转和一维平移),导致不良的手眼约束。
3、目前常见的手眼标定方式是利用机用二维标定板辅助标定,眼在手上是将标定板固定放置在指定位置,机械手带着相机以不同位姿角度去拍摄标定板图像,进而计算出机械手与相机关系,手眼分离是利用机械手带着标定板,以不同位姿供相机拍摄。然而在rcm约束下,机械手的位置与角度受限制,使得相机拍摄到的标定板信息过于相似,导致参数解算时精度下降或失败。
4、综上所述,利用机器人辅助微创手术是一个极具潜力的领域,利用机械手结合3d影像信息可提升手术的成功率与减少手术风险,然而由于平台机械结构自带的rcm约束使得目前现有的手眼标定方式精度低,因此如何提高带有rcm约束的手眼标定是重要的。
5、实际操作中,由于手术机器人存在结构的限制,只允许在远程运动中心(rcm)周围运动,因此在机械手手眼标定过程中相机采集到的位姿数据过于相似,导致参数计算结果不佳。造成此结果不是因为相机或机械手测量精度问题,而是平台机构不良约束造成数据源过于单一。
6、因此现有技术存在缺陷,急需改进。
技术实现思路
1、鉴于上述问题,本发明的目的是提供一种机械手手眼标定方法、系统和可读存储介质,能够能避免因rcm约束带来的不良位姿计算,提高标定精度和鲁棒性。
2、本发明第一方面提供了一种机械手手眼标定方法,包括:
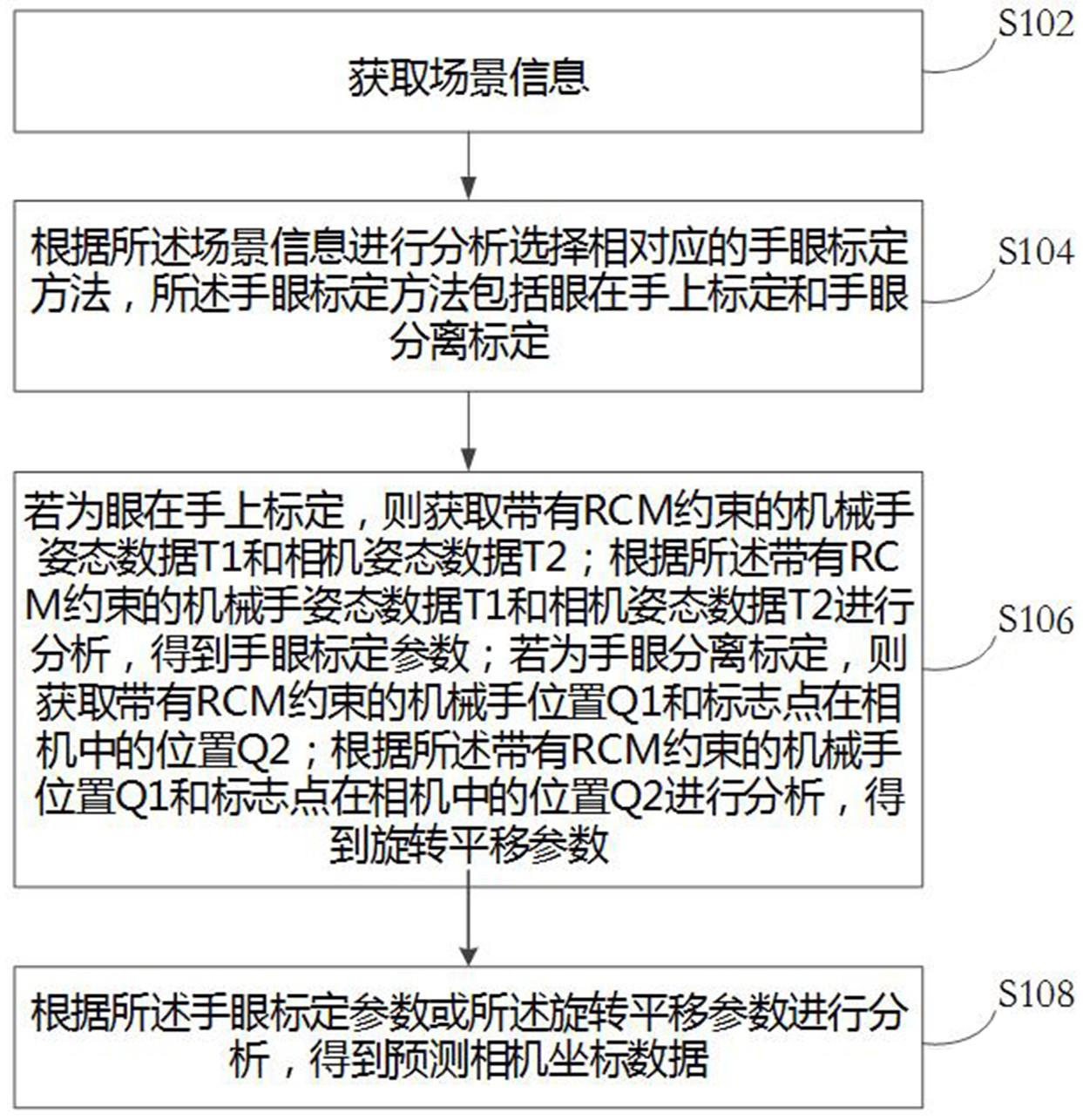
3、获取场景信息;
4、根据所述场景信息进行分析选择相对应的手眼标定方法,所述手眼标定方法包括眼在手上标定和手眼分离标定;
5、若为眼在手上标定,则获取带有rcm约束的机械手姿态数据t1和相机姿态数据t2;
6、根据所述带有rcm约束的机械手姿态数据t1和相机姿态数据t2进行分析,得到手眼标定参数;
7、若为手眼分离标定,则获取带有rcm约束的机械手位置q1和标志点在相机中的位置q2;
8、根据所述带有rcm约束的机械手位置q1和标志点在相机中的位置q2进行分析,得到旋转平移参数;
9、根据所述手眼标定参数或所述旋转平移参数进行分析,得到预测相机坐标数据。
10、本方案中,根据所述带有rcm约束的机械手姿态数据t1和相机姿态数据t2进行分析之前,还包括:
11、获取标定板圆点的世界坐标p1和相机坐标p2;
12、根据所述标定板圆点的世界坐标p1和相机坐标p2进行分析,得到标定板与相机的坐标转换关系,并建立姿态预测数据集;
13、根据所述姿态预测数据集建立姿态预测回归网络模型;
14、通过第一预设损失函数对所述姿态预测回归网络模型进行验证,得到预设姿态预测回归网络模型。
15、本方案中,所述根据所述带有rcm约束的机械手姿态数据t1和相机姿态数据t2进行分析,得到手眼标定参数,包括:
16、在所述带有rcm约束的机械手姿态数据t1中随机生成m1个机械手姿态,得到机械手位姿数据t3;
17、将所述机械手位姿数据t3输入至预设姿态预测回归网络模型进行分析,得到预测相机姿态数据t4;
18、将所述机械手位姿数据t3和所述预测相机姿态数据t4输入至第一预设矩阵中,经过矩阵运算得到手眼标定参数。
19、本方案中,根据所述带有rcm约束的机械手位置q1和标志点在相机中的位置q2进行分析之前,还包括:
20、获取带有rcm约束的机械手三维位置信息p3和标志点的相机坐标p4;
21、根据所述带有rcm约束的机械手三维位置信息p3和标志点的相机坐标p4进行分析,建立点预测回归网络模型;
22、通过第二预设损失函数对所述点预测回归网络模型进行验证,得到预设点预测回归网络模型。
23、本方案中,所述根据所述带有rcm约束的机械手位置q1和标志点在相机中的位置q2进行分析,得到旋转平移参数,包括:
24、在所述带有rcm约束的机械手位置q1中随机生成m2个机械手位置,得到机械手位置数据q3;
25、将所述机械手位置数据q3输入至预设点预测回归网络模型进行分析,得到预测的相机位置q4;
26、将所述机械手位置数据q3和所述预测的相机位置q4添加至第二预设参数矩阵中,得到构造转换矩阵h;
27、通过svd方法对所述构造转换矩阵h进行解耦,得到旋转平移参数。
28、本方案中,通过svd方法对所述构造转换矩阵h进行解耦,具体为:
29、通过svd方法对所述构造转换矩阵h进行解耦,用公式表示为:
30、,
31、其中,h为构造转换矩阵、r为旋转参数、t为平移参数、u和v代表二个相互正交矩阵、s代表一对角矩阵、为u的转置矩阵、α为机械手位置数据q3的质心、β为预测的相机位置q4的质心、为奇异值分解函数。
32、本发明第二方面提供了一种机械手手眼标定系统,包括存储器和处理器,所述存储器中包括机械手手眼标定方法程序,所述机械手手眼标定方法程序被所述处理器执行时实现如下步骤:
33、获取场景信息;
34、根据所述场景信息进行分析选择相对应的手眼标定方法,所述手眼标定方法包括眼在手上标定和手眼分离标定;
35、若为眼在手上标定,则获取带有rcm约束的机械手姿态数据t1和相机姿态数据t2;
36、根据所述带有rcm约束的机械手姿态数据t1和相机姿态数据t2进行分析,得到手眼标定参数;
37、若为手眼分离标定,则获取带有rcm约束的机械手位置q1和标志点在相机中的位置q2;
38、根据所述带有rcm约束的机械手位置q1和标志点在相机中的位置q2进行分析,得到旋转平移参数;
39、根据所述手眼标定参数或所述旋转平移参数进行分析,得到预测相机坐标数据。
40、本方案中,根据所述带有rcm约束的机械手姿态数据t1和相机姿态数据t2进行分析之前,还包括:
41、获取标定板圆点的世界坐标p1和相机坐标p2;
42、根据所述标定板圆点的世界坐标p1和相机坐标p2进行分析,得到标定板与相机的坐标转换关系,并建立姿态预测数据集;
43、根据所述姿态预测数据集建立姿态预测回归网络模型;
44、通过第一预设损失函数对所述姿态预测回归网络模型进行验证,得到预设姿态预测回归网络模型。
45、本方案中,所述根据所述带有rcm约束的机械手姿态数据t1和相机姿态数据t2进行分析,得到手眼标定参数,包括:
46、在所述带有rcm约束的机械手姿态数据t1中随机生成m1个机械手姿态,得到机械手位姿数据t3;
47、将所述机械手位姿数据t3输入至预设姿态预测回归网络模型进行分析,得到预测相机姿态数据t4;
48、将所述机械手位姿数据t3和所述预测相机姿态数据t4输入至第一预设矩阵中,经过矩阵运算得到手眼标定参数。
49、本方案中,根据所述带有rcm约束的机械手位置q1和标志点在相机中的位置q2进行分析之前,还包括:
50、获取带有rcm约束的机械手三维位置信息p3和标志点的相机坐标p4;
51、根据所述带有rcm约束的机械手三维位置信息p3和标志点的相机坐标p4进行分析,建立点预测回归网络模型;
52、通过第二预设损失函数对所述点预测回归网络模型进行验证,得到预设点预测回归网络模型。
53、本方案中,所述根据所述带有rcm约束的机械手位置q1和标志点在相机中的位置q2进行分析,得到旋转平移参数,包括:
54、在所述带有rcm约束的机械手位置q1中随机生成m2个机械手位置,得到机械手位置数据q3;
55、将所述机械手位置数据q3输入至预设点预测回归网络模型进行分析,得到预测的相机位置q4;
56、将所述机械手位置数据q3和所述预测的相机位置q4添加至第二预设参数矩阵中,得到构造转换矩阵h;
57、通过svd方法对所述构造转换矩阵h进行解耦,得到旋转平移参数。
58、本方案中,通过svd方法对所述构造转换矩阵h进行解耦,具体为:
59、通过svd方法对所述构造转换矩阵h进行解耦,用公式表示为:
60、,
61、其中,h为构造转换矩阵、r为旋转参数、t为平移参数、u和v代表二个相互正交矩阵、s代表一对角矩阵、为u的转置矩阵、α为机械手位置数据q3的质心、β为预测的相机位置q4的质心、为奇异值分解函数。
62、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括一种机械手手眼标定方法程序,所述一种机械手手眼标定方法程序被处理器执行时,实现如上述任一项所述的一种机械手手眼标定方法的步骤。
63、本发明公开的一种机械手手眼标定方法、系统和可读存储介质,本发明通过眼在手上和手眼分离两种方法进行手眼标定,对于眼在手上标定流程,使用预测姿态网络生成机械手与相机位姿加入标定方程,计算手眼标定结果;对于手眼分离标定流程,使用预测对应点网络生成机械手末端与相机坐标的三维坐标,并加入标定方程,计算最终结果。另外,本发明加入了生成及预测网络方法,在标定的三维空间中生成机械手坐标并预测出相应的相机坐标,加入至参数解算矩阵中,降低rcm约束的不良影响,提高参数鲁棒性与精度。
- 还没有人留言评论。精彩留言会获得点赞!