一种人工智能车间用生产线智能机械手的制作方法
本发明涉及机械设备,具体为一种人工智能车间用生产线智能机械手。
背景技术:
1、智能制造源于人工智能的研究。一般认为智能是知识和智力的总和,智能制造系统不仅能够在实践中不断地充实知识库,而且还具有自学习功能,还有搜集与理解环境信息和自身的信息,并进行分析判断和规划自身行为的能力,智能制造源于人工智能的研究。人工智能就是用人工方法在计算机上实现的智能。随着产品性能的完善化及其结构的复杂化、精细化,以及功能的多样化,促使产品所包含的设计信息和工艺信息量猛增,随之生产线和生产设备内部的信息流量增加,制造过程和管理工作的信息量也必然剧增,因而促使制造技术发展的热点与前沿,转向了提高制造系统对于爆炸性增长的制造信息处理的能力、效率及规模上。先进的制造设备离开了信息的输入就无法运转,柔性制造系统一旦被切断信息来源就会立刻停止工作。专家认为,制造系统正在由原先的能量驱动型转变为信息驱动型,这就要求制造系统不但要具备柔性,而且还要表现出智能,否则是难以处理如此大量而复杂的信息工作量的。
2、现有的智能机械手在搬运重量较大的货物时,常采用两侧夹持的方法进行固定,当机械手无法承受货物重量时,会发生货物滑落的现象,导致货物受到损害,造成资源的浪费,增加了经济损失,同时会对机械手造成损伤,降低了机械手的使用寿命。
3、为此,我们提出了一种人工智能车间用生产线智能机械手。
技术实现思路
1、针对现有技术的不足,本发明提供了一种人工智能车间用生产线智能机械手,用于提高智能机械手对货物搬运的适用范围,提高货物在搬运过程中的稳定性。
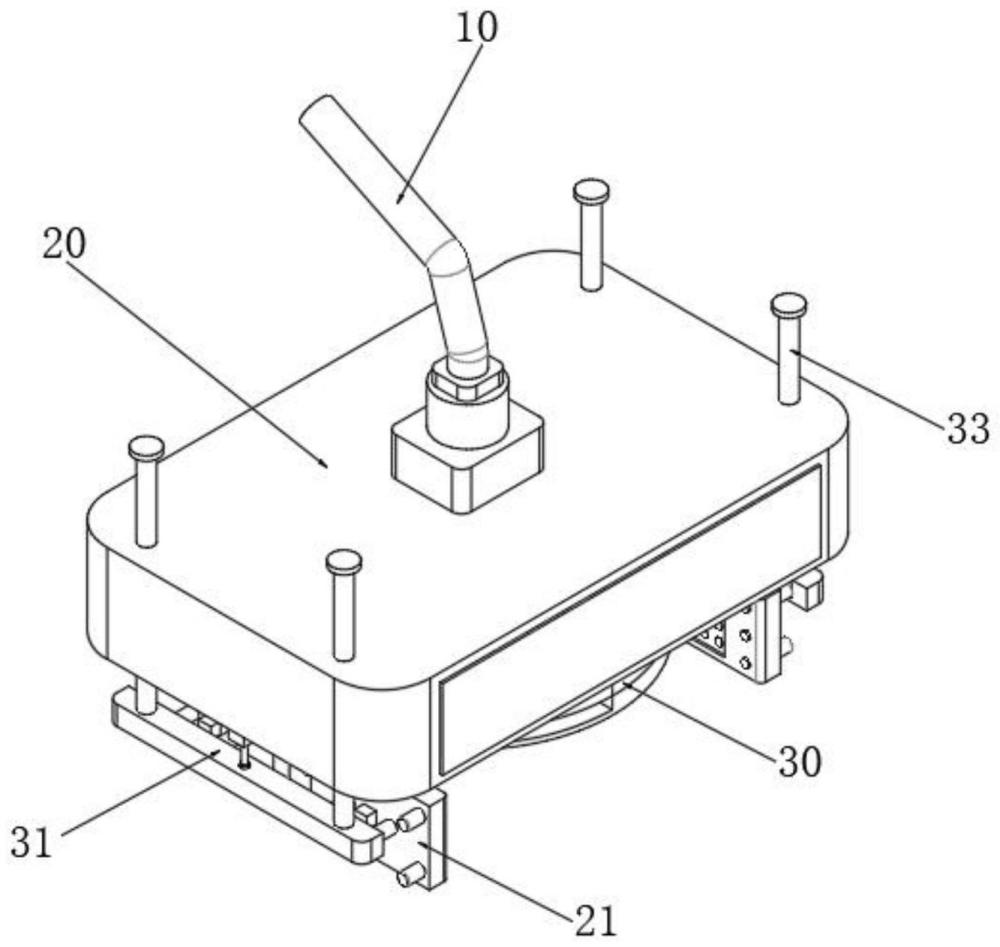
2、为实现以上目的,本发明通过以下技术方案予以实现:一种人工智能车间用生产线智能机械手,包括连接架和控制架,所述连接架的底端设置有控制架,且连接架的顶端与多段式调节臂的一端连接,所述控制架的底部设置有吸附架,且吸附架的内部设置有第一真空吸盘,所述吸附架内部的四周还设置有驱动组件,且四个驱动组件的一侧均设置有夹持组件,所述控制架底部的两侧均设置有支撑组件;
3、所述驱动组件包括驱动架,所述吸附架的内部设置有转动套,且转动套的内部与驱动架的一侧转动连接,其中驱动架的一侧通过电机驱动,所述驱动架内部的上下方均设置有滑槽,且两个滑槽的内部分别滑动设置有第一齿牙板和第二齿牙板,所述第二齿牙板底部的一侧设置有连接块,且连接块的底部与夹持组件的顶部连接;
4、所述夹持组件包括夹持架,所述夹持架的顶部与连接块的顶部连接,所述夹持架的一侧设置有第二真空吸盘,且夹持架的另一侧设置有第二伺服电缸,所述第二伺服电缸的驱动端与第二真空吸盘的一侧连接,所述夹持架内部的两侧均设置有活动块,且活动块的一侧设置有若干个橡胶块,所述橡胶块的一侧贯穿夹持架并延伸至夹持架的一侧,所述夹持架的另一侧设置有第三伺服电缸,且第三伺服电缸的驱动端与活动块的一侧连接。
5、优选的,所述吸附架的顶部设置有固定架,且吸附架的顶部与固定架的底部转动连接,所述固定架的内部设置有伺服电机,且伺服电机的输出轴一端与吸附架的顶部连接。
6、优选的,所述控制架的内部设置有两个电动推杆,且电动推杆的驱动端与固定架的顶部连接。
7、优选的,所述驱动架的内部还转动设置有传动齿轮,且传动齿轮位于第一齿牙板和第二齿牙板相对的一侧之间设置,所述传动齿轮的表面分别与第一齿牙板和第二齿牙板的表面啮合传动。
8、优选的,所述驱动架内部的上方设置有第一伺服电缸,且第一伺服电缸的驱动端设置有连接板,所述连接板的底部与第一齿牙板的顶部连接。
9、优选的,所述支撑组件包括安装架,所述控制架底部的两侧均设置有第四伺服电缸,且两个第四伺服电缸的驱动端均设置有安装架,所述安装架顶部的两侧均设置有限位滑杆,且两个限位滑杆的顶端均与控制架的内部滑动连接。
10、优选的,所述安装架内部的两侧均设置有活动槽,且两个活动槽的内部均设置有支撑架,所述安装架内部的两侧均通过电机转动设置有驱动齿轮,且两个支撑架顶部的一侧均设置有从动齿轮,两个所述驱动齿轮的表面分别与两个从动齿轮的表面啮合传动。
11、优选的,人工智能车间用生产线智能机械手的使用方法,具体包括以下步骤:
12、在利用智能机械手对货物进行转向调节时,通过动推杆的驱动端带动固定架在控制架的内部向下移动,让吸附架底部的第一真空吸盘对货物的顶部进行吸附,同时利用伺服电机的输出轴带动吸附架在固定架的底部进行转动,实现对货物的转向调节;
13、在利用智能机械手对表面为平面的货物进行搬运时,通过第一伺服电缸的驱动端通过连接板带动第一齿牙板在滑槽的内部向第二齿牙板的一侧滑动,通过传动齿轮带动第二齿牙板在滑槽的内部向一侧滑动,使第二齿牙板底部一侧的夹持架向吸附架的一侧靠近,在夹持架的一侧直接与货物的表面接触后,第二伺服电缸的驱动端带动第二真空吸盘与货物的表面接触,利用第二真空吸盘对货物的表面进行吸附,同时利用夹持架一侧的橡胶块与货物的表面接触,完成对货物的夹持限位;
14、在利用智能机械手对表面为弧面的货物进行搬运时,在夹持架的一侧直接与货物的表面接触后,通过第三伺服电缸的驱动端带动活动块在夹持架的内部滑动,让橡胶块的一侧从夹持架的内部伸出,利用多个橡胶块与货物的表面接触,完成对货物的夹持限位;
15、在利用智能机械手对重量较大的货物进行搬运时,通过夹持架对货物的表面进行稳定夹持后,通过第四伺服电缸的驱动端带动安装架向下移动,直至安装架移动至货物的下方,此时通过驱动齿轮带动从动齿轮进行转动,让活动槽内部的支撑架向外转动,利用支撑架对货物的底部进行支撑。
16、与现有技术相比具备以下有益效果:
17、1、通过智能机械手对货物进行搬砖时,根据货物类别的不同,进行货物的转移方式,在针对表面光滑且重量较轻的货物进行搬运时,通过吸附架内部的第一真空吸盘之间对货物进行吸附后,通过连接架以及连接架一端的调节臂进行货物搬运,在对重量较重的货物进行搬运时,根据货物的形状大小利用驱动组件对夹持组件的距离以及方位进行调节,通过四个夹持组件对货物的两侧或四周进行夹持,同时利用控制架底部两侧的支撑组件对货物的底部进行支撑,避免货物在搬运的过程中发生滑落的问题,提高智能机械手对货物的搬运安全性,并且在针对外表面为弧形的货物,通过夹持组件中不同的限位结构,对货物的表面进行多点夹持限位,保证货物在搬运过程中的稳定性,根据不同类型的货物进行不同的搬运方式智能调节,提高智能机械手的适用范围。
18、2、通过电机带动驱动架的一侧在转动套的内部进行转动,对驱动架的角度进行调节,根据货物四个面的角度,将驱动架一侧的夹持组件与货物的表面之间相互平行,进而让夹持组件对货物的四周进行夹持,提高对货物的夹持适用范围,根据货物表面形状的不同,可以灵活的选择不同的夹持方式,在对表面为平面的货物进行夹持时,利用第二真空吸盘对货物的表面进行吸附,同时利用夹持架一侧的橡胶块与货物的表面接触,增加夹持架与货物表面之间的摩擦力,有效提高夹持组件对货物的夹持稳定性,在对表面为弧面的货物进行夹持时,利用多个橡胶块与货物的表面接触,提高与货物表面之间的摩擦力,进而保证夹持组件对货物的夹持稳定性,避免货物在夹持的过程中发生滑落。
19、3、在对重量较大的货物进行搬运时,利用夹持组件对货物夹持后,通过第四伺服电缸的驱动端带动安装架向下移动,直至安装架移动至货物的下方,此时通过驱动齿轮带动从动齿轮进行转动,让活动槽内部的支撑架向外转动,利用支撑架对货物的底部进行支撑,避免货物在搬运过程中发生滑落,有效提高对货物在搬运过程中的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!