一种水下管道检测机器人定位紧固件
本发明涉及机器人,具体为一种水下管道检测机器人定位紧固件。
背景技术:
1、水下管道作为石油输送的重要设备,管道的检测工作尤为重要,而由于水下——尤其是海底——环境较为恶劣,水下管道的检测一般由搭载了检测设备的水下机器人来进行。
2、公开号为cn111038669b的中国发明公开了一种海底管道检测型水下机器人,该装置的“夹具装置通过直线导轨滑块机构转化左支架与右支架的转动,从而带动支架上卡爪的转动,最终使该夹具装置转化为对管道的夹紧力,防止rov本体的晃动和摆动,保证夹具工作的可靠性”。
3、但该装置的卡爪的张开角度较小,且机器人自身需要位于指定位置,保证两卡爪分别位于管道两侧,然后通过转动卡爪才能够将自身固定在管道外侧,而在水下,由于水体的流动,机器人位置难以保持稳定,卡爪对管道夹紧的过程中易发生错位,导致机器人的定位工作较为困难。为此,本发明提出一种水下管道检测机器人定位紧固件用于解决上述问题。
技术实现思路
1、本发明的目的在于提供一种水下管道检测机器人定位紧固件,以解决上述背景技术中提出的机器人的定位工作较为困难的问题。
2、为实现上述目的,本发明提供如下技术方案:一种水下管道检测机器人定位紧固件,包括:
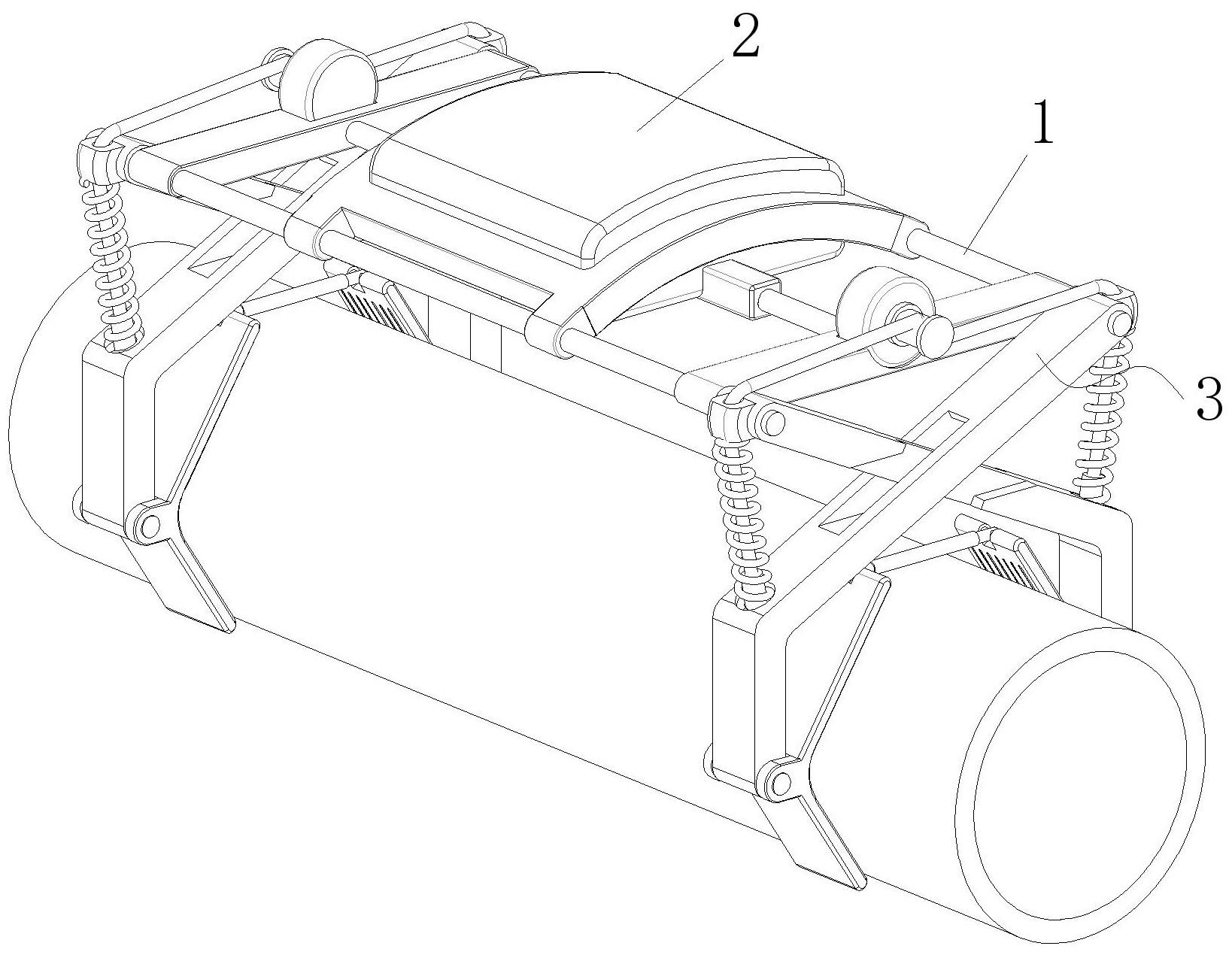
3、安装架,所述安装架包括两个相互平行设置的导向杆,两个所述导向杆之间滑动安装有机器人本体,所述机器人本体底部固定设置有检测探头;
4、紧固夹具,所述紧固夹具设置有两个且分别位于安装架的两端,所述紧固夹具包括两个相互交叉呈“x”状的活动臂,两个所述活动臂的上端分别与两个导向杆的端部转动连接,所述活动臂的下端弯折形成折弯部,所述折弯部的下端转动安装有卡爪,且折弯部与卡爪的转动连接处位于卡爪中部,两个所述卡爪之间设置有牵引杆,所述牵引杆的两端分别与两个卡爪的上端转动连接。
5、优选的,所述折弯部和卡爪均设置成“<”字形,所述卡爪的内侧压在管道表面,所述卡爪的外侧拐角处固定设置有连接座,所述折弯部的下端固定设置有销轴,所述折弯部与连接座之间通过销轴转动连接。
6、优选的,所述卡爪内壁的上下两侧分别开设有竖向摩擦纹和横向摩擦纹,所述卡爪的上端开设有转动槽,所述牵引杆的端部位于转动槽内腔并与之转动连接。
7、优选的,所述牵引杆的中部固定设置有橡胶套,所述牵引杆的两端均活动贯穿设置有与之垂直的轴杆,所述轴杆位于转动槽内腔且轴杆的端部与转动槽内壁固定连接。
8、优选的,所述活动臂的中部开设有避让槽,所述活动臂的上端固定连接有绳索导块,且绳索导块的中部活动穿设有牵引绳索,所述牵引绳索的下端绷紧并固定连接在另一个活动臂的下端。
9、优选的,所述紧固夹具的一侧设置有安装板,所述安装板的两端分别固定两个导向杆的端部,所述安装板的表面固定安装有收卷电机,且收卷电机的输出端固定连接有收卷辊,两个所述牵引绳索均缠绕在收卷辊外侧,所述收卷电机的外侧设置有防水罩。
10、优选的,所述活动臂的下端表面开设有凹槽,所述凹槽槽底固定设置有绳索套,所述牵引绳索的下端与绳索套固定连接,所述绳索套的外侧套设有压紧弹簧,所述压紧弹簧套设于牵引绳索的下端外侧且压紧弹簧的上端抵住绳索导块下表面。
11、优选的,所述机器人本体的外侧固定设置有外框架,所述外框架的两侧均固定设置有带孔凸块,所述带孔凸块活动套设在与之对应的导向杆的外侧,所述机器人本体的两端均安装有伸缩推杆,所述伸缩推杆的一端固定在安装板中部。
12、与现有技术相比,本发明的有益效果是:
13、本发明通过在安装架的两端均设置有紧固夹具,紧固夹具包括两个相互交叉呈“x”状的活动臂,且两个活动臂的上端分别与两个导向杆的端部转动连接,活动臂的下端向下弯折形成折弯部,折弯部下端转动安装有卡爪,两个卡爪的上端之间连接有牵引杆,本装置中活动臂的旋转中心位于自身上端,旋转角度更大,且活动臂转动将卡爪张开后,两个卡爪受牵引杆牵引能够张开至更大的角度,接着通过将机器人本体底部正对管道,然后靠近管道,管道外壁会挤压牵引杆并带动两个卡爪自动转动且相互靠近,直至对管道夹紧,相较于传统的结构,本装置在定位时只需控制机器人本体倾角使得机器人本体底部的检测探头始终正对管道即可,定位工作更加简单。
技术特征:
1.一种水下管道检测机器人定位紧固件,其特征在于:包括:
2.根据权利要求1所述的一种水下管道检测机器人定位紧固件,其特征在于:所述折弯部(32)和卡爪(4)均设置成“<”字形,所述卡爪(4)的内侧压在管道表面,所述卡爪(4)的外侧拐角处固定设置有连接座(44),所述折弯部(32)的下端固定设置有销轴(33),所述折弯部(32)与连接座(44)之间通过销轴(33)转动连接。
3.根据权利要求1所述的一种水下管道检测机器人定位紧固件,其特征在于:所述卡爪(4)内壁的上下两侧分别开设有竖向摩擦纹(41)和横向摩擦纹(42),所述卡爪(4)的上端开设有转动槽(43),所述牵引杆(5)的端部位于转动槽(43)内腔并与之转动连接。
4.根据权利要求3所述的一种水下管道检测机器人定位紧固件,其特征在于:所述牵引杆(5)的中部固定设置有橡胶套,所述牵引杆(5)的两端均活动贯穿设置有与之垂直的轴杆,所述轴杆位于转动槽(43)内腔且轴杆的端部与转动槽(43)内壁固定连接。
5.根据权利要求1所述的一种水下管道检测机器人定位紧固件,其特征在于:所述活动臂(31)的中部开设有避让槽(34),所述活动臂(31)的上端固定连接有绳索导块(35),且绳索导块(35)的中部活动穿设有牵引绳索(63),所述牵引绳索(63)的下端绷紧并固定连接在另一个活动臂(31)的下端。
6.根据权利要求5所述的一种水下管道检测机器人定位紧固件,其特征在于:所述紧固夹具(3)的一侧设置有安装板(6),所述安装板(6)的两端分别固定两个导向杆(1)的端部,所述安装板(6)的表面固定安装有收卷电机(61),且收卷电机(61)的输出端固定连接有收卷辊(62),两个所述牵引绳索(63)均缠绕在收卷辊(62)外侧,所述收卷电机(61)的外侧设置有防水罩。
7.根据权利要求5所述的一种水下管道检测机器人定位紧固件,其特征在于:所述活动臂(31)的下端表面开设有凹槽(7),所述凹槽(7)槽底固定设置有绳索套(71),所述牵引绳索(63)的下端与绳索套(71)固定连接,所述绳索套(71)的外侧套设有压紧弹簧(73),所述压紧弹簧(73)套设于牵引绳索(63)的下端外侧且压紧弹簧(73)的上端抵住绳索导块(35)下表面。
8.根据权利要求1所述的一种水下管道检测机器人定位紧固件,其特征在于:所述机器人本体(2)的外侧固定设置有外框架(21),所述外框架(21)的两侧均固定设置有带孔凸块(22),所述带孔凸块(22)活动套设在与之对应的导向杆(1)的外侧,所述机器人本体(2)的两端均安装有伸缩推杆(23),所述伸缩推杆(23)的一端固定在安装板(6)中部。
技术总结
本发明涉及机器人技术领域,具体为一种水下管道检测机器人定位紧固件,包括:安装架,安装架包括两个相互平行设置的导向杆,两个导向杆之间滑动安装有机器人本体,机器人本体底部固定设置有检测探头;紧固夹具包括两个相互交叉呈“X”状的活动臂,折弯部的下端转动安装有卡爪,两个卡爪之间设置有牵引杆;有益效果为:通过在安装架的两端均设置有紧固夹具,紧固夹具包括两个相互交叉呈“X”状的活动臂,折弯部下端转动安装有卡爪,两个卡爪的上端之间连接有牵引杆,将机器人本体底部正对管道,然后靠近管道,管道外壁会挤压牵引杆并带动两个卡爪自动转动且相互靠近,直至对管道夹紧,相较于传统的结构,定位工作更加简单。
技术研发人员:陈庆龙,杨萍,粱汝楷,符传宝,刘瑞鑫,谭昊宇
受保护的技术使用者:广东海洋大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!