弱光环境下无人机自适应主动视觉导航方法、装置
本发明涉及无人机视觉导航,尤其涉及一种弱光环境下无人机自适应主动视觉导航方法、装置。
背景技术:
1、无人机导航通常采用的方案是,基于无人机搭载的摄像装置的图像识别功能,但当环境光线较弱时会导致摄像装置获取的图像欠曝,造成从图像中获取的特征点的数量减少、质量降低,影响特征点匹配效果,从而降低视觉导航的鲁棒性以及定位精度。
2、为了解决上述问题,例如,(1)专利号为cn2020103811827的发明专利公开了一种高动态场景下的微小型无人机视觉导航方法,采用曝光控制和补偿方法对输入图像进行光度预处理,克服高动态场景中光照随机变化,并通过全局位姿图优化,提升导航精度,但该发明针对的是传统相机输出信息的处理,并且该方法基于神经网络对图像进行分割再处理,实时性较差;(2)专利号为cn2019109920469的发明专利公开了一种基于激光线辅助的无人机视觉导航定位方法,利用激光发射器射出具有规则形状的激光线,投影于建筑体表面,然后通过无人机搭载的双目视觉传感器对其进行观测,并依此为特征进行视觉导航,从而为无人机提供导航信息,但方案中需要引入额外的激光发射器作为视觉参考,系统整体鲁棒性相对较差。
3、因此,现有技术中还没有一种同时兼顾实时性、鲁棒性和准确性的弱光环境下的无人机导航方案。
技术实现思路
1、发明目的:本发明提供一种弱光环境下无人机自适应主动视觉导航方法、装置,通过筛选得到的事件特征点生成虚拟帧,基于虚拟帧中的势场力计算得到特征偏向速度,由此可以主动选择事件特征较为丰富的路径,提升了导航的准确度,且由于计算量较小,因此,实时性较强;进一步的,加入时间权重调整特征速度,无人机根据事件特征分布情况自适应地匹配速度,提升了鲁棒性。
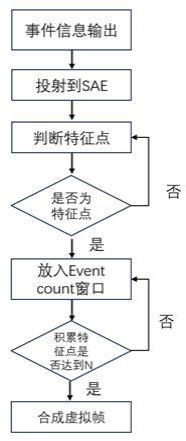
2、技术方案:本发明一种弱光环境下无人机自适应主动视觉导航方法,包括:获取事件相机输出的事件信息,对事件信息进行筛选,筛选得到的像素点作为激活像素点;在激活事件表面上,检查最新激活像素点的时间戳与相邻激活像素点的时间戳之间的时间间距,确定所述最新激活像素点是否为事件特征点;所述激活事件表面,由多个激活像素点累积形成;将获取的事件特征点生成虚拟帧;计算虚拟帧上的点对虚拟帧中心的势场力,将势场力合成得到势场合力;所述势场力,指虚拟帧上的点对虚拟帧中心的吸引力;通过势场合力计算得到无人机特征偏向速度,与无人机目标偏向速度合成得到弱光环境速度,无人机执行弱光环境速度。
3、具体的,将事件信息中的像素点的亮度,与相同位置的像素点的亮度进行比较,若亮度变化达到对比度阈值,将事件信息中的像素点筛选作为激活像素点。
4、具体的,所述激活事件表面为三维立体形状,每当筛选得到激活像素点,将最新激活像素点添加至所述激活事件表面,所述激活事件表面的x轴、y轴和z轴坐标,分别对应激活事件表面中激活像素点的x轴、y轴坐标和时间戳。
5、具体的,以最新激活像素点为圆心,以第一长度为半径和第二长度为半径,分别得到激活事件表面上的第一圆周和第二圆周;同时满足如下两个条件,认定最新激活像素点为事件特征点:(1)所述第一圆周上,存在连续的第一标准数量的激活像素点的时间戳,大于第一标准时间戳;(2)所述第二圆周上,存在连续的第二标准数量的激活像素点的时间戳,大于第二标准时间戳。
6、具体的,当获取的事件特征点达到虚拟帧生成所需数量,则生成一帧虚拟帧,之后获取的事件特征点用于生成下一帧虚拟帧。
7、具体的,将虚拟帧划分为无势场区域、弱势场区域和强势场区域;所述无势场区域中的点对虚拟帧中心无势场力;所述弱势场区域中的点,通过点与虚拟帧中心之间的夹角,和点与虚拟帧中心之间的距离,计算对虚拟帧中心的势场力;所述强势场区域中的点,通过点携带的电荷量,和点与虚拟帧中心的夹角,计算对虚拟帧中心的势场力。
8、具体的,计算虚拟帧上的点对虚拟帧中心的势场力,采用如下公式进行计算:
9、,
10、其中,fi表示虚拟帧上的点对虚拟帧中心的势场力,d表示虚拟帧上的点与虚拟帧中心之间的距离,以虚拟帧中心为圆心、r为半径的区域为无势场区域,以虚拟帧中心为圆心、半径r至r+s之间的区域为弱势场区域,无势场区域和弱势场区域之外的区域为强势场区域,qi表示虚拟帧上的点携带的电荷量,θ表示虚拟帧上的点与虚拟帧中心之间的夹角;
11、所述qi,采用如下公式进行计算:
12、,
13、其中,θmax表示最大夹角。
14、具体的,对于历史虚拟帧和当前虚拟帧,分别获取事件特征点达到虚拟帧生成所需数量的累积时间,根据累积时间的比较结果,对无人机特征偏向速度与无人机目标偏向速度合成过程中,无人机特征偏向速度的时间权重进行调整。
15、具体的,弱光环境速度的计算公式如下:
16、,
17、其中,vpub表示弱光环境速度,vg表示无人机目标偏向速度,vf表示无人机特征偏向速度,α表示无人机目标偏向速度的权重,无人机特征偏向速度的时间权重γt的计算公式代入表示时间权重限制函数ε(x)中;
18、时间权重γt的计算公式如下:
19、,
20、其中,ti表示第i帧虚拟帧的累积时间,k表示当前时刻,tk表示当前虚拟帧的累积时间;
21、时间权重限制函数ε(x)的计算公式如下:
22、,
23、其中,x表示代入的时间权重数值;
24、无人机特征偏向速度的计算公式如下:
25、,
26、其中,n表示虚拟帧中事件特征点总数。
27、本发明还提供一种弱光环境下无人机自适应主动视觉导航装置,包括筛选单元、累积单元、虚拟帧生成单元、势场力计算单元和速度合成单元,其中:所述筛选单元,用于获取事件相机输出的事件信息,对事件信息进行筛选,筛选得到的像素点作为激活像素点;所述累积单元,用于在激活事件表面上,检查最新激活像素点的时间戳与相邻激活像素点的时间戳之间的时间间距,确定所述最新激活像素点是否为事件特征点;所述激活事件表面,由多个激活像素点累积形成;所述虚拟帧生成单元,用于将获取的事件特征点生成虚拟帧;所述势场力计算单元,用于计算虚拟帧上的点对虚拟帧中心的势场力,将势场力合成得到势场合力;所述势场力,指虚拟帧上的点对虚拟帧中心的吸引力;所述速度合成单元,用于通过势场合力计算得到无人机特征偏向速度,与无人机目标偏向速度合成得到弱光环境速度,无人机执行弱光环境速度。
28、有益效果:与现有技术相比,本发明具有如下显著优点:通过筛选得到的事件特征点生成虚拟帧,基于虚拟帧中的势场力计算得到特征偏向速度,由此可以主动选择事件特征较为丰富的路径,提升了导航的准确度,且由于计算量较小,因此,实时性较强;进一步的,加入时间权重调整特征速度,无人机根据事件特征分布情况自适应地匹配速度,提升了鲁棒性。
技术特征:
1.一种弱光环境下无人机自适应主动视觉导航方法,其特征在于,包括:
2.根据权利要求1所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述对事件信息进行筛选,筛选得到的像素点作为激活像素点,包括:
3.根据权利要求1所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述激活事件表面为三维立体形状,每当筛选得到激活像素点,将最新激活像素点添加至所述激活事件表面,所述激活事件表面的x轴、y轴和z轴坐标,分别对应激活事件表面中激活像素点的x轴、y轴坐标和时间戳。
4.根据权利要求3所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述在激活事件表面上,检查最新激活像素点的时间戳与相邻激活像素点的时间戳之间的时间间距,确定所述最新激活像素点是否为事件特征点,包括:
5.根据权利要求1所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述将获取的事件特征点生成虚拟帧,包括:
6.根据权利要求1所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述计算虚拟帧上的点对虚拟帧中心的势场力,包括:
7.根据权利要求6所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述计算虚拟帧上的点对虚拟帧中心的势场力,采用如下公式进行计算:
8.根据权利要求7所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述通过势场合力计算得到无人机特征偏向速度,包括:
9.根据权利要求8所述的弱光环境下无人机自适应主动视觉导航方法,其特征在于,所述通过势场合力计算得到无人机特征偏向速度,与无人机目标偏向速度合成得到弱光环境速度,包括:
10.一种弱光环境下无人机自适应主动视觉导航装置,其特征在于,包括筛选单元、累积单元、虚拟帧生成单元、势场力计算单元和速度合成单元,其中:
技术总结
本发明公开了一种弱光环境下无人机自适应主动视觉导航方法、装置,包括:对事件相机输出的事件信息进行筛选,得到激活像素点;在激活事件表面上,检查最新激活像素点的时间戳与相邻激活像素点的时间戳之间的时间间距,确定所述最新激活像素点是否为事件特征点;将获取的事件特征点生成虚拟帧;计算虚拟帧上的点对虚拟帧中心的势场力,将势场力合成得到势场合力;通过势场合力计算得到无人机特征偏向速度,与无人机目标偏向速度合成得到弱光环境速度,无人机执行弱光环境速度。采用上述技术方案,基于虚拟帧中的势场力计算得到特征偏向速度,选择事件特征较为丰富的路径,提升了导航的准确度,且由于计算量较小,因此,导航实时性较强。
技术研发人员:刘云平,潘慧婷,敖洋钒,牛天宇,王立喜,张柄棋,龚毅光,臧强,朱一辉
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!