一种机械臂触觉传感器、系统及其机械臂控制方法
本发明属于机器触觉和传感器,具体涉及一种机械臂触觉传感器、系统及其机械臂控制方法。
背景技术:
1、机械臂安装臂触觉传感器可以使机械臂具备触觉感知能力,使其能够感知和测量物体的压力、形状、质地等信息。这可以让机械臂更精准地控制力的施加,适应不同的机械臂抓取任务和环境。
2、随着机器感知技术的不断进步,研究人员越来越关注将触觉感知应用于人机交互技术中。然而,传统的触觉传感器多为点阵式触觉传感器,由于其复杂的制造工艺、大量的电极和连线等限制,在实现对大面积、复杂形状的感知方面存在局限性,这使得机械臂很难像人类一样获取全局有效的触觉信息,难以有效完成机械臂抓取等任务。
技术实现思路
1、本发明的目的是为克服已有技术的不足之处,提出一种机械臂触觉传感器、系统及其机械臂控制方法。本发明的机械臂触觉传感器采用电阻抗层析成像技术,不仅克服了传统点阵式结构的限制,使得触觉感知能够覆盖更广泛的区域,还能够应对机械臂所需的各种感知形态,进一步提升机械臂的感知能力,使得机械臂可以更好地完成复杂的抓取任务。
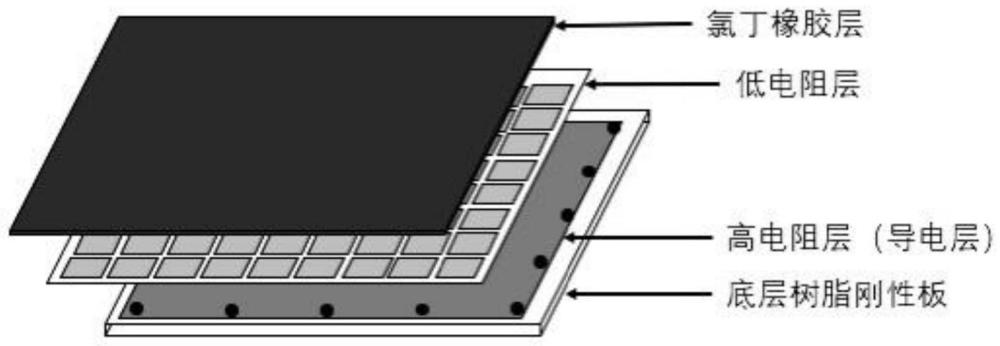
2、本发明实施例提出一种机械臂触觉传感器,包括从下至上依次放置的底层树脂刚性板、高电阻层、低电阻层和氯丁橡胶层;其中,所述底层树脂刚性板不导电,所述底层树脂刚性板的边界处均匀放置多个电极,在所述底层树脂刚性板表面喷涂导电性石墨喷剂以形成导电性石墨喷剂平面;通过将银浆涂抹在所述电极和所述导电性石墨喷剂平面的接触区域,所述导电性石墨喷剂平面和所述电极共同组成所述高电阻层;所述低电阻层为均匀间隔的多个低电阻织物片构成的阵列,所述氯丁橡胶层由氯丁橡胶泡沫构成,所述低电阻层的织物片粘贴在所述氯丁橡胶泡沫的底部。
3、在本发明的一个具体实施例中,所述机械臂触觉传感器工作方式如下:当所述氯丁橡胶层未受到压力时,若在相邻两个电极上施加电流激励,该电流在高电阻层流动,不通过低电阻织物片;当所述氯丁橡胶层受到向下的压力时,部分低电阻织物片与高电阻层发生接触,形成并联电阻器的等效电路,从而增加所述高电阻层和所述低电阻层的接触区域的电导率;通过依次对所述机械臂触觉传感器中各相邻电极组成的电极对施加电流激励并测量各电极的电压值,基于电阻层析成像原理,得到所述机械臂触觉传感器接触物体的电导率矩阵。
4、本发明实施例还提出一种基于上述机械臂触觉传感器的控制电路,包括:所述机械臂触觉传感器、电源模块、多路复用开关、数据采集及微控制模块;所述电源模块连接多路复用开关连接,所述多路复用开关连接数据采集及微控制模块,所述数据采集及微控制模块连接所述机械臂触觉传感器;所述电源模块用于输出恒定电流;所述多路复用开关用于连通所述机械臂触觉传感器上所选取的相邻电极组成的电极对以注入恒定电流;所述数据采集及微控制模块包含数据采集子模块和微控制单元;所述数据采集子模块与所述机械臂触觉传感器的各电极分别连接,用于采集所述机械臂触觉传感器各电极输出的电压信号;所述微控制单元用于根据相邻激励模式控制所述多路复用开关将恒定电流注入到所述机械臂触觉传感器上各相邻电极组成的电极对中。
5、在本发明的一个具体实施例中,所述控制电路还包括一个电压信号处理模块,所述电压信号处理模块利用matlab将所述数据采集子模块输出的电压信号转换为电导率矩阵。
6、在本发明的一个具体实施例中,所述电压信号处理模块还用于将所述电导率矩阵映射成对应的触觉感知图像。
7、本发明实施例还提出一种基于上述控制电路的机械臂控制系统,包括:人机交互模块、视觉模块、触觉模块和机械臂控制模块;
8、所述人机交互模块,用于接收操作者通过即时通信软件发布的自然语言指令,然后提取所述自然语言指令中的关键信息并发送给所述机械臂控制模块,所述关键信息包括抓取物的类别、重量级别和收容区域;
9、所述机械臂控制模块,用于将抓取物的类别信息发送给所述视觉模块,根据所述视觉模块返回的与抓取物类别相同的物体的中心位置的坐标信息、触觉模块返回的电导率矩阵和所述重量级别信息,生成抓取物的空间位置坐标;结合收容区域的空间位置坐标,控制机械臂完成抓取任务;
10、所述视觉模块,用于采集机械臂执行任务的环境图像,通过对所述图像进行目标检测,基于接收到的抓取物的类别信息,输出与抓取物类别相同的物体的中心位置的坐标信息并发送至所述机械臂控制模块;
11、所述触觉模块采用所述控制电路,其中所述机械臂触觉传感器放置在机械臂表面,通过在所述机械臂触觉传感器表面放置具有不同重量的与抓取物类别相同的物体,所述控制电路获取相应的所述机械臂触觉传感器表面的电导率矩阵并发送给机械臂控制模块。
12、在本发明的一个具体实施例中,所述即时通信软件采用微信。
13、在本发明的一个具体实施例中,所述提取所述自然语言指令中的关键信息采用uie通用信息提取模型。
14、在本发明的一个具体实施例中,所述对所述图像进行目标检测采用yolox目标检测模型。
15、本发明实施例还提出一种基于上述机械臂控制系统的机械臂控制方法,包括:
16、1)操作者通过即时通信软件向人机交互模块将发送对机械臂的自然语言的抓取任务指令,人机交互模块利用uie模型提取所述任务指令的关键信息并发送给机械臂控制模块,所述关键信息包括抓取物的类别、重量级别和收容区域;
17、2)机械臂控制模块向视觉模块发送抓取物的类别信息,视觉模块通过连接的摄像头采集机械臂工作时的环境图像,然后利用yolox目标检测模型在图像中标记出属于该类别的物体,并返回其中心位置坐标给机械臂控制模块;
18、3)通过在触觉模块中的机械臂触觉传感器表面放置具有不同重量的与抓取物类别相同的物体,基于所述机械臂触觉传感器的控制电路对所述机械臂触觉传感器表面的物体进行电导率测量,得到对应的电导率矩阵返回给机械臂控制模块;
19、4)机械臂控制模块基于视觉模块返回的坐标信息、触觉模块返回的电导率矩阵信息和重量级别信息,得到最终的抓取物位置坐标;
20、5)机械臂控制模块基于抓取物位置坐标和收容区域的位置坐标,控制机械臂进行运动以完成抓取。
21、本发明的特点及有益效果在于:
22、本发明提出一种大面积的机械臂触觉传感器,跨越了传统点阵结构的限制,基于电阻抗层析成像技术的思路,采用稀疏的电极布局,实现了机械臂触觉感知范围的显著扩展,还能够满足机械臂在各种感知场景下的多样需求,从而显著增强了机械臂的感知能力。
23、本发明还提出一种利用了所述机械臂触觉传感器的机械臂控制系统,该系统通过触觉信息的引入使得机械臂能够更全面地感知周围环境,获取物体的形状质量等信息,进而在执行任务时更加准确和高效。
24、本发明的机械臂触觉传感器及控制系统可以在工业自动化等领域中发挥重要作用。例如,在生产线上,机械臂可以通过触觉感知来检测和处理物体的质量问题,提高生产效率和产品质量。在医疗领域,机械臂可以利用触觉信息来进行精确而安全的手术操作。
- 还没有人留言评论。精彩留言会获得点赞!