一种桁架机器人振动抑制控制方法
本发明涉及机器人系统运动控制,具体涉及一种桁架机器人振动抑制控制方法。
背景技术:
1、机器人系统是由机器人和作业对象及环境共同构成的整体。其中,桁架机器人系统作为一种典型的机器人系统即机械臂转动力以及台车运行力为其输入。且其拥有能够自动控制的、可重复编程、多功能、多自由度的功能,能够搬运物体、操作工具,以完成各种作业。桁架机器人是一种运用于工业搬运,堆叠等功能的机器人,其运输过程往往伴随着台车的平移和机械臂的关节同时工作,两种性质不同的运动存在高度耦合,导致了动力学模型和控制器设计的难度增加。同时,对于机械臂刚性不足的情况还需考虑其机械臂末端振动抑制问题,因此对桁架机器人的控制已经不满足于传统控制方法。相较于传统的机器人控制而言,桁架机器人系统需要考虑桁架台车的定位,这使得系统动力学模型会更加复杂,在实现机械臂与台车定位同时,机械臂末端的抑振以及整体系统的抗外部干扰能力成了一个极具挑战性的问题。
技术实现思路
1、本发明的目的是提供一种桁架机器人振动抑制控制方法,解决了桁架机器人运输过程中往往伴随着台车的平移和机械臂的关节同时工作,两种性质不同的运动存在高度耦合,使系统动力学模型更加复杂,在机械臂刚性强度不足时,不能快速有效的消除机械臂末端振动以及外部的未知扰动的技术问题。
2、为实现上述目的,本发明提供了一种桁架机器人振动抑制控制方法,步骤包括:
3、s1、基于桁架机器人系统的运行工况参数,结合拉格朗日动力学方程,建立柔性桁架机器人系统数学模型并进行特性分析;
4、s2、对所述柔性桁架机器人系统数学模型线性化并对原有的桁架机器人系统状态量进行重构,进行桁架机器人柔性模型的解耦;
5、s3、根据所述重构的桁架机器人系统状态量设计反步控制算法,并通过动态面法改善原有反步控制算法连续求导带来的参数爆炸;
6、s4、根据所述反步控制算法,加入扰动观测器,通过扰动观测器的输出抵消桁架机器人系统所受的非匹配外部扰动。
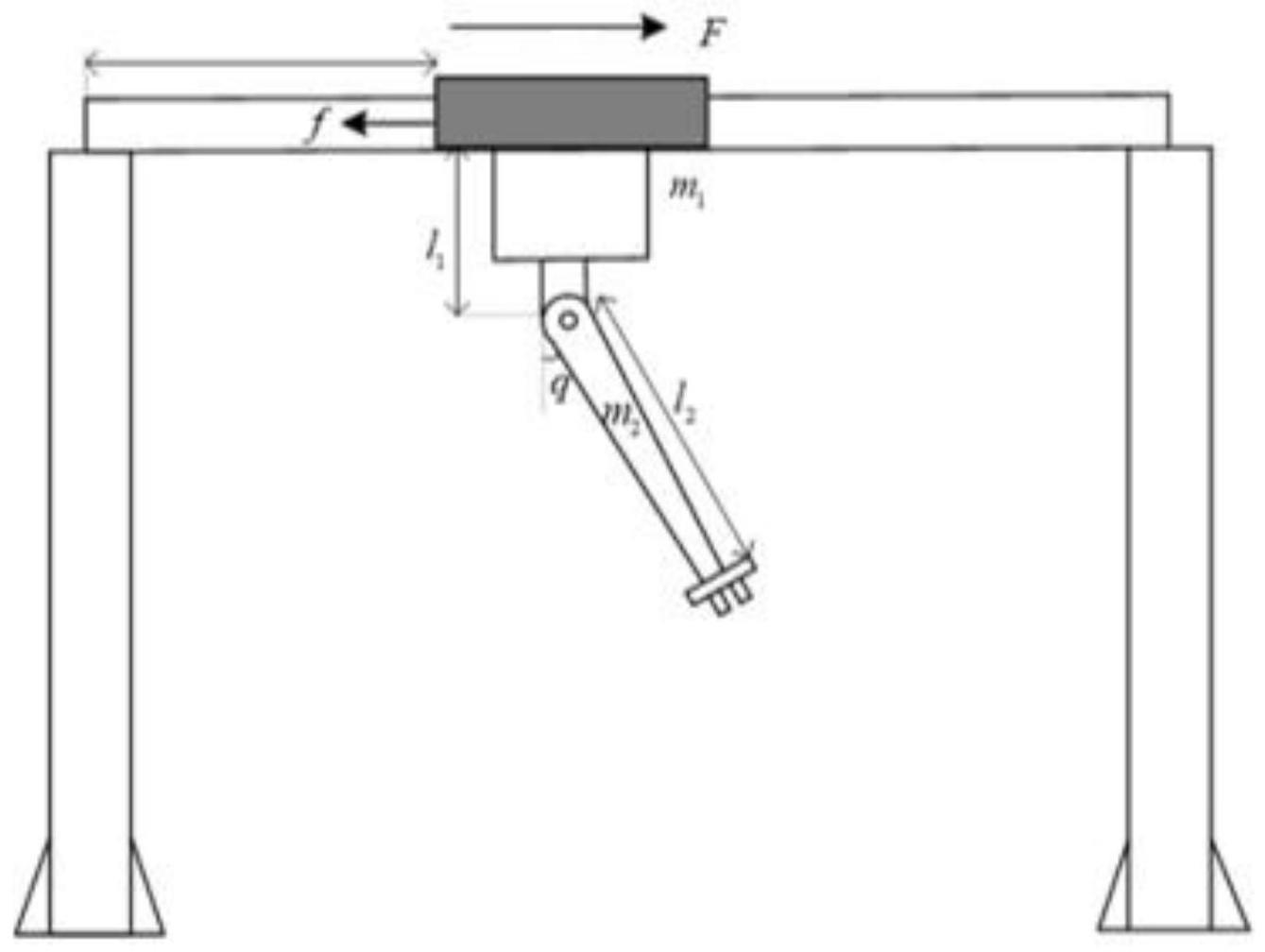
7、优选的,所述步骤s1中柔性桁架机器人系统数学模型表达式为:
8、
9、g(ql)=[0k(q-θ)k(θ-q)+m2l2gsin q]
10、u=[fτ0]
11、fs=[00d]
12、其中,m(ql)为桁架机器人系统的惯性矩阵,为向心-科里奥利矩阵,g(ql)为重力矢量,u为控制输入矢量,fs为桁架机器人受到的外部干扰,ql为桁架机器人系统状态变量,为一阶导数,为其二阶导数,θ为机械臂电机输出角度,q为机械臂关节输出的角度,m2为机械臂的质量,l2为机械臂的长度,g为重力加速度,k为弹簧的弹性系数,对于描述桁架机器人系统的状态量,x为台车平移距离,对于驱动力/转矩,f,τ为小车驱动力、机械臂的转矩,d为机械臂受到的非匹配扰动。
13、优选的,所述步骤s2具体包括:
14、s21、将柔性桁架机器人系统数学模型线性化:
15、在机械臂关节输出的角度q较小时,将cos q≈1,sin q≈q,将其扩展为
16、其中:表示两个不同状态量导数;
17、线性化简化后的柔性桁架机器人系统数学模型为:
18、
19、
20、
21、其中,m1为小车的质量,m2为机械臂的质量,l2为机械臂的长度,g为重力加速度,i1为机械臂的转动惯量,表示小车位移加速度,表示机械臂关节输出的角加速度,表示机械臂电机输出角加速度;j为电机的转动惯量;
22、s22、将系统状态量重构:
23、
24、
25、其中,x1,x2,x3,x4,γ1,γ2为重构后的状态量,θ为机械臂电机输出角度,为机械臂电机输出角速度,q为机械臂关节输出的角度,为机械臂关节输出的角速度,x为小车位移距离,为小车位移速度,m1为小车的质量,m2为机械臂的质量,l2为机械臂的长度,g为重力加速度,i1为机械臂的转动惯量。
26、优选的,所述步骤s3中通过动态面法改善原有反步控制算法具体包括:
27、s31、令
28、
29、
30、s32、将线性化后的柔性桁架机器人系统数学模型转换成级联形式:
31、
32、
33、其中:为重构后的状态量的导数,θ为机械臂电机输出角度,q为机械臂关节输出的角度,x为小车位移距离,m2为机械臂的质量,l2为机械臂的长度,g为重力加速度,i1为机械臂的转动惯量,k为弹簧的弹性系数,f,τ为小车驱动力、机械臂的转矩。
34、优选的,所述步骤s4通过扰动观测器的输出抵消桁架机器人系统所受的非匹配外部扰动方法包括:
35、根据所述步骤s21建立的柔性桁架机器人系统数学模型转换成级联形式设计扰动观测器:
36、
37、
38、
39、
40、
41、其中,分别为x1,x2,x3,x4估计值的导数,为γ1,γ2估计值的导数,为x2与x2估计值的差,a11,a12,a13,b1,b2,为观测器的增益参数,ds为积分符号。
42、优选的,所述步骤s4中抵消桁架机器人系统所受的非匹配外部扰动方法还包括:
43、桁架台车和机械臂的跟踪控制,参考轨迹为:
44、
45、其中,机械臂驱动角θ设置为0,xr表示小车平移距离,tf表示小车的运行时间,xd表示小车的运行距离,x0表示小车初始位置。
46、因此,本发明采用上述一种桁架机器人振动抑制控制方法,通过桁架机器人系统状态量重构的方法解决了模型耦合问题,并改进原有的反步法解决了微分爆炸问题;与此同时加入扰动观测器观测扰动用来抵消非匹配扰动,最终能够实现高效的轨迹跟踪、振动抑制以及抗干扰控制效果,提高了控制精度与鲁棒性。
47、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种桁架机器人振动抑制控制方法,其特征在于,步骤包括:
2.根据权利要求1所述的一种桁架机器人振动抑制控制方法,其特征在于,所述步骤s1中柔性桁架机器人系统数学模型表达式为:
3.根据权利要求1所述的一种桁架机器人振动抑制控制方法,其特征在于,所述步骤s2具体包括:
4.根据权利要求1所述的一种桁架机器人振动抑制控制方法,其特征在于,所述步骤s3中通过动态面法改善原有反步控制算法具体包括:
5.根据权利要求1所述的一种桁架机器人振动抑制控制方法,其特征在于,所述步骤s4通过扰动观测器的输出抵消桁架机器人系统所受的非匹配外部扰动方法包括:
6.根据权利要求1所述的一种桁架机器人振动抑制控制方法,其特征在于,所述步骤s4中抵消桁架机器人系统所受的非匹配外部扰动方法还包括:
技术总结
本发明公开了一种桁架机器人振动抑制控制方法,属于机器人系统运动控制技术领域,步骤包括:基于拉格朗日动力学方程建立柔性桁架机器人系统数学模型并分析特性;对柔性桁架机器人系统数学模型线性化以及系统状态量重构;根据重构系统状态量设计反步控制算法,并通过动态面法改善原有反步控制算法连续求导带来的参数爆炸;通过扰动观测器的输出抵消桁架机器人系统非匹配外部扰动。本发明采用上述一种桁架机器人振动抑制控制方法,通过桁架机器人系统状态量重构的方法解决了模型耦合问题,改进原反步控制算法解决微分爆炸问题;加入扰动观测器观测扰动抵消非匹配扰动,实现高效的轨迹跟踪、振动抑制以及抗干扰控制效果。
技术研发人员:于莉莉,谢迅,欧阳慧珉
受保护的技术使用者:南京工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!