一种基于巡检数据的机器人巡检系统的制作方法
本发明属于智能机器人领域,涉及人工智能技术,具体是一种基于巡检数据的机器人巡检系统。
背景技术:
1、智能机器人是一种结合了人工智能技术的机器人,能够感知环境、理解任务、作出决策并执行动作,人工智能技术的发展赋予了智能机器人学习、推断和自主决策的动力,使其能够适应不同的环境和任务要求,机器人巡检是指利用机器人进行巡检任务的一种方式,机器人巡检通过搭载各种传感器和执行器,能够感知环境、收集数据、分析问题并执行相应的操作,完成巡检任务。
2、现有人工巡检一方面需要投入大量的人力资源且巡检效率低下,另一方面,人工巡检容易受到主观因素的影响而导致错误的发生,为此,我们提出一种基于巡检数据的机器人巡检系统。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种基于巡检数据的机器人巡检系统。
2、本发明通过获取巡检数据完成巡检机器人的避障,并得到移动路径实现巡检机器人的初步工作,根据传感器设备获取的多种数据实现巡检机器人对巡检点火灾的判断,利用图像数据和卷积神经网络算法实现巡检机器人对打架斗殴场景的判断,得到异常巡检点,并针对异常巡检点进行异常处理,通过计算巡检机器人回收系数和巡检机器人回收系数阈值数据对巡检机器人进行回收判断,得到回收判断数据,并根据回收判断数据进行回收处理。
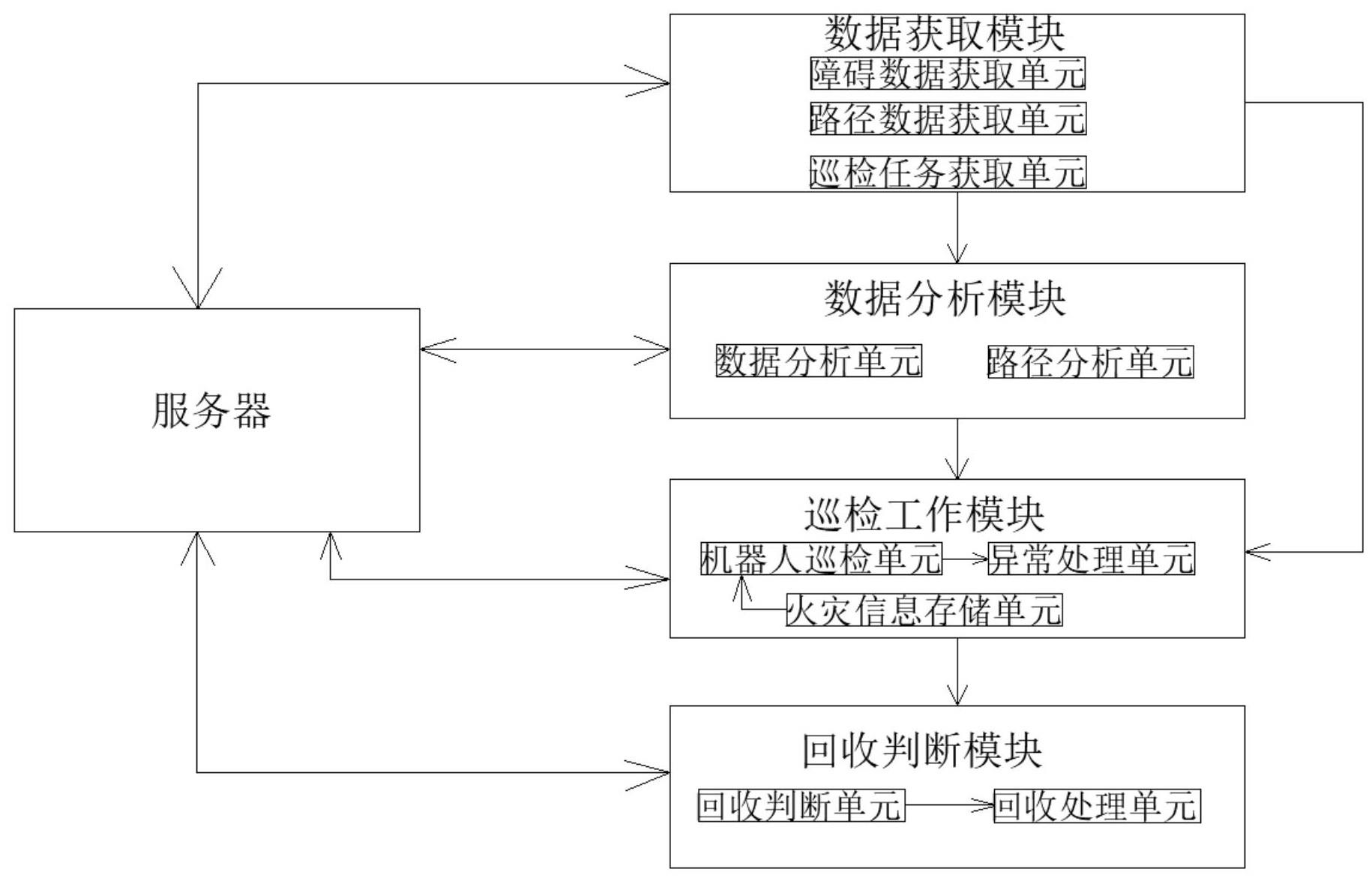
3、为了实现上述目的,本发明采用了如下技术方案进行实现,一种基于巡检数据的机器人巡检系统各模块具体工作过程如下:
4、数据获取模块:获取巡检数据;
5、数据分析模块:制定巡检机器人避障策略和工作路径;
6、巡检工作模块:巡检机器人开展巡检并进行异常处理;
7、回收判断模块:对巡检机器人进行回收判断并进行回收;
8、服务器分别与数据获取模块、数据分析模块、巡检工作模块和回收判断模块相连。
9、进一步地,数据获取模块进行障碍物判断并获取巡检数据,具体如下:
10、数据获取模块包括障碍数据获取单元、路径数据获取单元和巡检任务获取单元;
11、障碍数据获取单元获取物体最低高度数值和巡检机器人的工作高度数值,将物体最低高度数值与巡检机器人的工作高度数值进行数值对比,当物体最低高度数值低于巡检机器人的工作高度数值时,判断此物体为障碍物;
12、障碍数据获取单元获取避障数据,路径数据获取单元获取路径数据,巡检任务获取单元获取巡检任务;
13、数据获取模块将避障数据、路径数据和巡检任务设置为巡检数据。
14、进一步地,对避障数据、路径数据和巡检任务进行获取,具体如下:
15、障碍数据获取单元分别获取障碍物与巡检机器人的距离数据、障碍物和巡检机器人的移动速度数值和移动加速度数值、障碍物和巡检机器人的位置数据和移动方向数据,得到避障数据;
16、路径数据获取单元获取环境中物体与巡检机器人的距离数据和方向信息作为第二激光雷达数据,获取巡检机器人所在环境的图像数据作为视觉数据,获取巡检机器人的运动加速度和角速度作为imu数据,获取巡检机器人的经纬度位置数据,将激光雷达数据、视觉数据、imu数据和经纬度位置数据设置为路径数据;
17、巡检任务获取单元接收服务器输送的巡检任务。
18、进一步地,数据分析模块根据巡检数据制定避障策略和工作路径,具体如下:
19、数据分析模块包括数据分析单元和路径分析单元;
20、数据分析单元根据障碍物的移动速度数值和移动加速度数值,获取障碍物的运动状态,具体如下:
21、当障碍物的移动速度数值和移动加速度数值为0时,判断此时的障碍物为静止障碍物,将静止障碍物的位置数据输送至路径分析单元;
22、当障碍物的移动速度数值和移动加速度数值不为0时,判断此时的障碍物为运动障碍物;
23、针对静止障碍物,获取障碍物位置数据和巡检机器人的移动方向数据,若障碍物的位置数据处于巡检机器人的移动方向上,巡检机器人通过改变移动方向绕过障碍物;
24、针对运动障碍物,数据分析单元根据运动障碍物和巡检机器人是否发生碰撞制定避障策略,具体如下:
25、当障碍物和巡检机器人发生碰撞,巡检机器人改变移动路径;
26、障碍物和巡检机器人不发生碰撞,巡检机器人无需改变移动路径;
27、路径分析单元根据路径数据并结合静止障碍物的位置数据和巡检任务的优先级得到巡检机器人的移动路径。
28、进一步地,数据分析单元对巡检机器人与运动障碍物是否发生碰撞进行判断,具体如下:
29、获取障碍物和巡检机器人的位置数据和移动方向数据,根据kalman滤波器算法获取障碍物和巡检机器人的移动路径将其离散为两组坐标点,判断两组坐标点的重叠情况,具体如下:
30、若两组坐标点存在重叠,则障碍物和机器人存在发生碰撞的概率,设置此移动路径上的障碍物和机器人为碰撞预警组,根据障碍物与巡检机器人的距离数据获取障碍物和机器人距离重叠坐标点的距离数值;
31、若两组坐标点不存在重叠,则障碍物和机器人不发生碰撞,设置此移动路径上的障碍物和机器人为安全路径组;
32、针对碰撞预警组,获取障碍物的移动速度数值和移动加速度数值、获取巡检机器人的移动速度数字和加速度数值;
33、根据障碍物距离重叠坐标点的距离数值、障碍物的移动速度数值和障碍物的移动加速度数值,计算得到障碍物移动至重叠坐标点的时间数值t1;
34、根据巡检机器人距离重叠坐标点的距离数值、巡检机器人的移动速度数值和巡检机器人的移动加速度数值计算得到巡检机器人移动至重叠坐标点的时间数值t2;
35、当t1=t2时,障碍物和巡检机器人同时经过重叠坐标点,障碍物和巡检机器人发生碰撞;
36、当t1≠t2,障碍物和巡检机器人不同时经过重叠坐标点,障碍物和巡检机器人不发生碰撞。
37、进一步地,路径分析单元获取巡检机器人移动路径,具体如下:
38、获取第二激光雷达数据、视觉数据、imu数据和经纬度位置数据,使用slam算法建立巡检区域地图;
39、获取巡检任务和静止障碍物的位置数据,将巡检点的位置数据以坐标点的方式在巡检区域地图上进行标注,得到巡检点坐标,将静止障碍物的位置数据以坐标点的方式在巡检区域地图上进行标注,得到障碍物坐标,将巡检点坐标和障碍物坐标设置为坐标点数据;
40、根据巡检任务的优先级,将巡检点坐标通过巡检点优先级由高到低进行排序,针对优先级相同的巡检点,按照巡检点与巡检机器人的距离数值由近到远进行排序,得到巡检顺序数据;
41、根据坐标点数据和巡检顺序数据,使用dijkstra算法得到巡检机器人的移动路径,移动路径连接巡检点坐标,绕过障碍物坐标;
42、将移动路径划分为多个路径点,巡检机器人通过运动加速度和角速度的改变实现在路径点之间移动。
43、进一步地,巡检工作模块进行机器人巡检和异常处理,具体如下:
44、巡检工作模块包括火灾信息存储单元、机器人巡检单元和异常处理单元;
45、火灾信息存储单元通过互联网获取n个真实火灾事故现场的温度数值、烟雾浓度数值和一氧化碳浓度数值作为火灾案例数据存储至服务器;
46、巡检工作单元对巡检点进行火灾判断,将发生火灾的巡检点设置为火灾巡检点,将未发生火灾的巡检点设置为正常巡检点;
47、巡检工作单元对打架斗殴进行判断,将打架斗殴场景的巡检点为设置为第一等级巡检点,将不存在打架斗殴场景的巡检点为设置为第二等级巡检点;
48、将火灾巡检点和第一等级巡检点设置为异常巡检点,异常处理单元针对异常巡检点进行异常处理,具体如下:
49、当巡检机器人移动至火灾巡检点,巡检机器人通过警报器发出警报,并利用通讯设备拨打119报警;
50、当巡检机器人移动至第一等级巡检点,巡检机器人通过警报器发出警报,并利用通讯设备拨打110报警。
51、进一步地,巡检工作单元进行火灾判断,具体如下:
52、巡检机器人通过红外温度传感器获取巡检点的温度数值,巡检机器人通过烟雾传感器获取巡检点的烟雾浓度数值,巡检机器人通过红外一氧化碳传感器获取巡检点的一氧化碳浓度数值;
53、根据巡检点的温度数值、巡检点的烟雾浓度数值和巡检点的一氧化碳浓度数值,计算得到火灾判断系数hzxs;
54、获取n个真实火灾事故现场的温度数值,计算得到火灾平均温度数值;
55、获取n个真实火灾事故现场的烟雾浓度数值,计算得到火灾平均烟雾浓度数值;
56、获取n个真实火灾事故现场的一氧化碳浓度数值,计算得到火灾平均一氧化碳浓度数值;
57、根据火灾平均温度数值、火灾平均烟雾浓度数值和火灾平均一氧化碳浓度数值,计算得到火灾判断系数阈值数据hzxsi;
58、当hzxs≥hzxsi,判断为发生火灾,设置此巡检点为火灾巡检点;
59、当hzxs<hzxsi,判断为未发生火灾,设置此巡检点为正常巡检点。
60、进一步地,巡检工作单元对打架斗殴进行判断,具体如下:
61、巡检机器人通过第二摄像头获取巡检点的图像数据作为测试集,通过互联网获取大量包含打架斗殴场景的图片作为数据集;
62、对数据集中涉及打架斗殴的场景利用人工进行数据标注,得到训练集,使用训练集对cnn模型进行训练,在训练过程中,利用反向传播算法对模型参数进行调整,提高cnn模型对打架斗殴场景的判断精度;
63、将训练后的cnn模型对测试集进行判断,将cnn模型识别到打架斗殴场景的巡检点为设置为第一等级巡检点,将cnn模型没有识别到打架斗殴场景的巡检点为设置为第二等级巡检点。
64、进一步地,回收判断模块对巡检机器人进行回收判断并进行回收,具体如下:
65、回收判断模块包括回收判断单元和回收处理单元;
66、回收判断单元通过cpu温度传感器获取巡检机器人的cpu工作温度数值,通过工作计时器获取巡检机器人的工作时长数值,通过电池电量检测仪获取巡检机器人剩余电量数值;
67、根据cpu工作温度数值、巡检机器人的工作时长数值和巡检机器人剩余电量数值,计算得到巡检机器人回收系数hsxs;
68、根据巡检机器人使用说明书获取巡检机器人的cpu工作温度标准数值wc1,巡检机器人标准工作时长数值sc1和巡检机器人回收剩余电量数值dl1;
69、根据cpu工作温度标准数值、巡检机器人标准工作时长数值和巡检机器人回收剩余电量数值计算得到巡检机器人回收系数阈值hsxs1;
70、当hsxs<hsxs1,判断为第一回收区间,正常工作巡检机器人;
71、当hsxs≥hsxs1,判断为第二回收区间,对应待回收巡检机器人;
72、回收处理单元针对待回收巡检机器人进行回收处理,具体如下:
73、(1)回收巡检机器人并进行功能测试,测试包括但不限于巡检机器人的移动检测、传感器检测、通信检测,确保巡检机器人的各项功能是否正常运作;
74、(2)对巡检机器人进行清洁和维护,包括清除灰尘、清洗机器人外壳、检查电池状态等,确保机器人在使用过程中能够保持良好的工作状态。
75、综上所述,由于采用了上述技术方案,本发明的有益效果是:
76、1、本发明通过对静止障碍物和运动障碍物进行区分,并采取不同的避让策略,极大程度上提高了巡检机器人的使用安全性;
77、2、本发明通过获取多种不同数据对火灾进行判断,较人工巡检大大提高了火灾判断的准确性,并规避了人工巡检可能造成人员伤亡的风险;
78、3、本发明通过对巡检机器人进行回收判断,提高了巡检机器人的使用寿命,为巡检任务的高效完成提供了保障。。
- 还没有人留言评论。精彩留言会获得点赞!