具有测距传感器的机器人手臂装置的制作方法
本发明涉及排爆机器人,尤其涉及一种具有测距传感器的机器人手臂装置。
背景技术:
1、随着科技的快速发展,机器人技术不断升级迭代,排爆机器人大量应用于城市反恐、灾后救援等行动中。这些作业环境通常是危险、高风险或具有潜在威胁的地方,这些环境对人员进入存在极大的风险,有些区域人员甚至无法进入。在这种危险环境下使用机器人代替人工完成爆炸物探测与排除等工作,可以极大地保障人员的人身安全,提高作战效率。
2、排爆机器人在实际使用时,除了车体和机械臂的运动控制,对于目标物的准确抓取也是一大难题。一般来说,目标物可能是可疑包裹、爆炸装置、潜在炸弹、危险化学品或等极其危险的物品。而传统的机械手臂系统在执行任务时通常依赖于人工的判断或使用简单的触觉传感器判断夹爪与目标物的距离。这一局限性对操作人员的操作经验和操作水平要求之高,同时由于目标物的特殊性,人工判断或使用简单的触觉传感器一旦失误或存在误触等情况,会造成目标物的泄漏或爆炸,从而造成机器人的损坏以及对人员安全构成严重威胁。
3、使用传感器对目标物的位置进行判断是必不可少的改进手段。现有的改进手段通常是在车体上安装测距传感器,这种改进方式存在局限性:在机械臂运行时,目标物与传感器之间会被干扰或是遮挡,传感器的测距结果会出现误差或是错误,从而影响操作人员的判断以及目标物的抓取。
技术实现思路
1、本发明所要解决的技术问题是如何提供一种能够提高测距的准确性,进而可以为操作员提供目标物与夹爪的实时距离的机器人手臂装置。
2、为解决上述技术问题,本发明所采取的技术方案是:一种具有测距传感器的机器人手臂装置,包括手臂本体,所述手臂本体的正上方设置有测距传感器组件,所述测距传感器组件用于手臂夹爪工作时对目标物进行实时测距。
3、进一步的技术方案在于:所述手臂本体包括机器人手臂、腕关节基座、爪基组件和手臂夹爪,所述测距传感器组件包括测距传感器座和测距传感器;所述机器人手臂末端与腕关节基座相连接,腕关节基座前侧与爪基组件相连,手臂爪夹固定在爪基组件的前侧;所述爪基组件顶部正上方安装有测距传感器座,所述测距传感器座上部凹槽内固定有测距传感器。
4、进一步的技术方案在于:所述腕关节基座位于排爆机器人手臂的末端,可实现腕关节基座的上下摆动。
5、进一步的技术方案在于:所述爪基组件位于腕关节基座的正前侧,爪基组件在腕关节基座带动下可实现180°的摆动。
6、进一步的技术方案在于:所述爪基组件的前侧安装有手臂爪夹,手臂爪夹可以实现360°的旋转运动。
7、进一步的技术方案在于:所述测距传感器座安装在爪基组件的正上方位置,保障测距传感器能够稳定地固定在手臂爪夹正上方的同时,最大程度地接近目标物体。
8、进一步的技术方案在于:所述测距传感器安装在距传感器座上部凹槽内固定,当手臂爪夹执行抓取任务时,测距传感器能够实时地测量手臂爪夹到目标物的距离。
9、采用上述技术方案所产生的有益效果在于:本申请所述机器人手臂整体结构简单,方便操作人员安装与检修,可以减少机械爪的复杂性和部件数量,降低制造成本和维护难度。测距传感器与手臂夹爪系统紧密集成,能够实现自动化的控制和调整,以应对不同任务和工作环境的变化。综上,所述机器人手臂整体具有可靠性、准确性以及适用于不同任务和工作环境的特点。
技术特征:
1.一种具有测距传感器的机器人手臂装置,其特征在于:包括手臂本体,所述手臂本体的正上方设置有测距传感器组件,所述测距传感器组件用于手臂夹爪工作时对目标物进行实时测距。
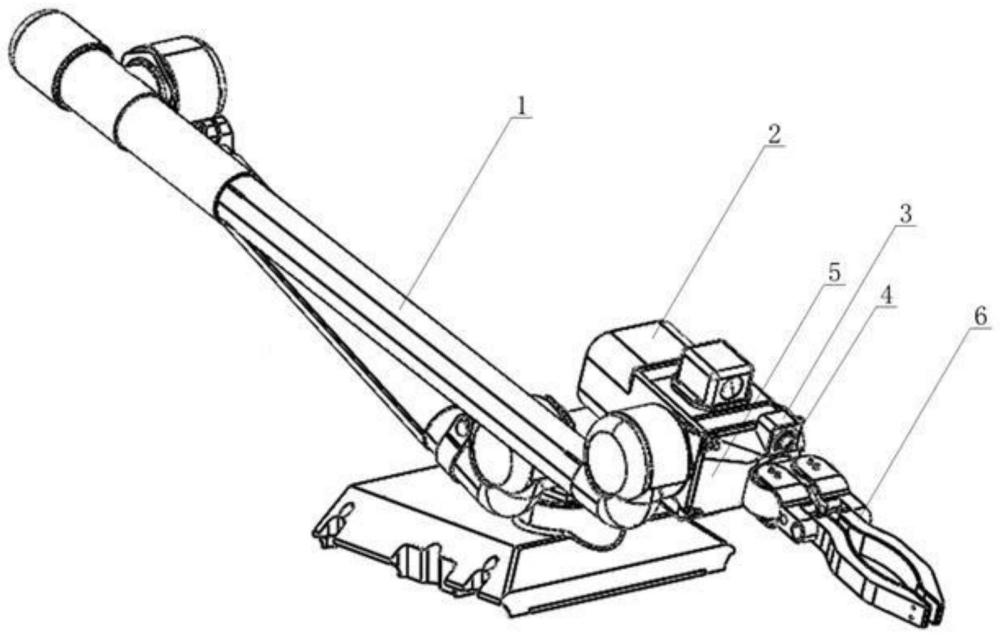
2.如权利要求1所述的具有测距传感器的机器人手臂装置,其特征在于:所述手臂本体包括机器人手臂(1)、腕关节基座(2)、爪基组件(5)和手臂夹爪(6),所述测距传感器组件包括测距传感器座(3)和测距传感器(4);所述机器人手臂(1)末端与腕关节基座(2)相连接,腕关节基座(2)前侧与爪基组件(5)相连,手臂爪夹(6)固定在爪基组件(5)的前侧;所述爪基组件(5)顶部正上方安装有测距传感器座(3),所述测距传感器座(3)上部凹槽内固定有测距传感器(4)。
3.如权利要求2所述的具有测距传感器的机器人手臂装置,其特征在于:所述腕关节基座(2)位于排爆机器人手臂(1)的末端,可实现腕关节基座(2)的上下摆动。
4.如权利要求2所述的具有测距传感器的机器人手臂装置,其特征在于:所述爪基组件(5)位于腕关节基座(2)的正前侧,爪基组件(5)在腕关节基座(2)带动下可实现180°的摆动。
5.如权利要求2所述的具有测距传感器的机器人手臂装置,其特征在于:所述爪基组件(5)的前侧安装有手臂爪夹(6),手臂爪夹(6)可以实现360°的旋转运动。
6.如权利要求2所述的具有测距传感器的机器人手臂装置,其特征在于:所述测距传感器座(3)安装在爪基组件(5)的正上方位置,保障测距传感器(4)能够稳定地固定在手臂爪夹(6)正上方的同时,最大程度地接近目标物体。
7.如权利要求2所述的具有测距传感器的机器人手臂装置,其特征在于:所述测距传感器(4)安装在距传感器座(3)上部凹槽内固定,当手臂爪夹(6)执行抓取任务时,测距传感器(4)能够实时地测量手臂爪夹(6)到目标物的距离。
技术总结
本发明公开了一种具有测距传感器的机器人手臂装置,涉及排爆机器人技术领域。所述装置包括手臂本体,所述手臂本体的正上方设置有测距传感器组件,所述测距传感器组件用于手臂夹爪工作时对目标物进行实时测距。所述手臂本体包括机器人手臂、腕关节基座、爪基组件和手臂夹爪,所述测距传感器组件包括测距传感器座和测距传感器;所述机器人手臂末端与腕关节基座相连接,腕关节基座前侧与爪基组件相连,手臂爪夹固定在爪基组件的前侧;所述爪基组件顶部正上方安装有测距传感器座,所述测距传感器座上部凹槽内固定有测距传感器。所述装置能够提高测距的准确性,进而可以为操作员提供目标物与夹爪的实时距离。
技术研发人员:卢秋红,孙振华,王文纪,黄波君
受保护的技术使用者:上海合时智能科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!