一种紧凑型摆线关节模组的制作方法
本发明涉及机器人关节,具体是一种紧凑型摆线关节模组。
背景技术:
1、摆线减速机又名摆线针轮减速机,是一种应用行星式传动原理,采用摆线针齿啮合的新颖传动装置,被广泛应用作机器人关节模组。摆线关节模组的全部传动装置可分为三部分:输入部分、减速部分、输出部分。
2、经查,公开号为cn216923064u的中国发明专利公开了一种摆线减速机,包括电机组件和减速器组件,电机组件包括主轴,减速器组件包括壳体,壳体内嵌有外法兰支撑轴承和内法兰支撑轴承,外法兰支撑轴承的内圈上嵌装有外连接法兰盘,内法兰支撑轴承的内圈上嵌装有内连接法兰盘,主轴上套有第一轴承和第二轴承,主轴上串接有两偏心轴,每一偏心轴上分别套装有一摆线轮,壳体内设有连接外连接法兰盘和内连接法兰盘的连接柱,摆线轮上开设有活动孔,壳体内还设有连接外连接法兰盘和内连接法兰盘的柱销,摆线轮上开设有柱销孔,柱销孔内转动连接有柱销套;主轴上套有嵌在摆线轮上的第三轴承。该摆线减速机通过多轴承布设结构,并配合电机组件输出部分与减速器组件输入部分为一体设置,使之传动平稳,无异响;并将柱销及柱销孔结构环布于摆线轮,进一步提升传动平稳性,整体功能完善。但其电机组件安装在减速器组件的一端,使其整体长度增加,而关节模组一般是垂直安装在关节位置处,这样势必会增大机械臂的横向宽度,增大了机器人的体积的同时,影响机器人整体的美观性。
3、因此,本发明提供一种紧凑型摆线关节模组,以解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、本发明提供一种紧凑型摆线关节模组,旨在解决背景技术中提出的现有的摆线关节模组长度过大,安装在机器人易增大机器人的整体体积的同时,影响机器人整体美观性等问题。
3、(二)技术方案
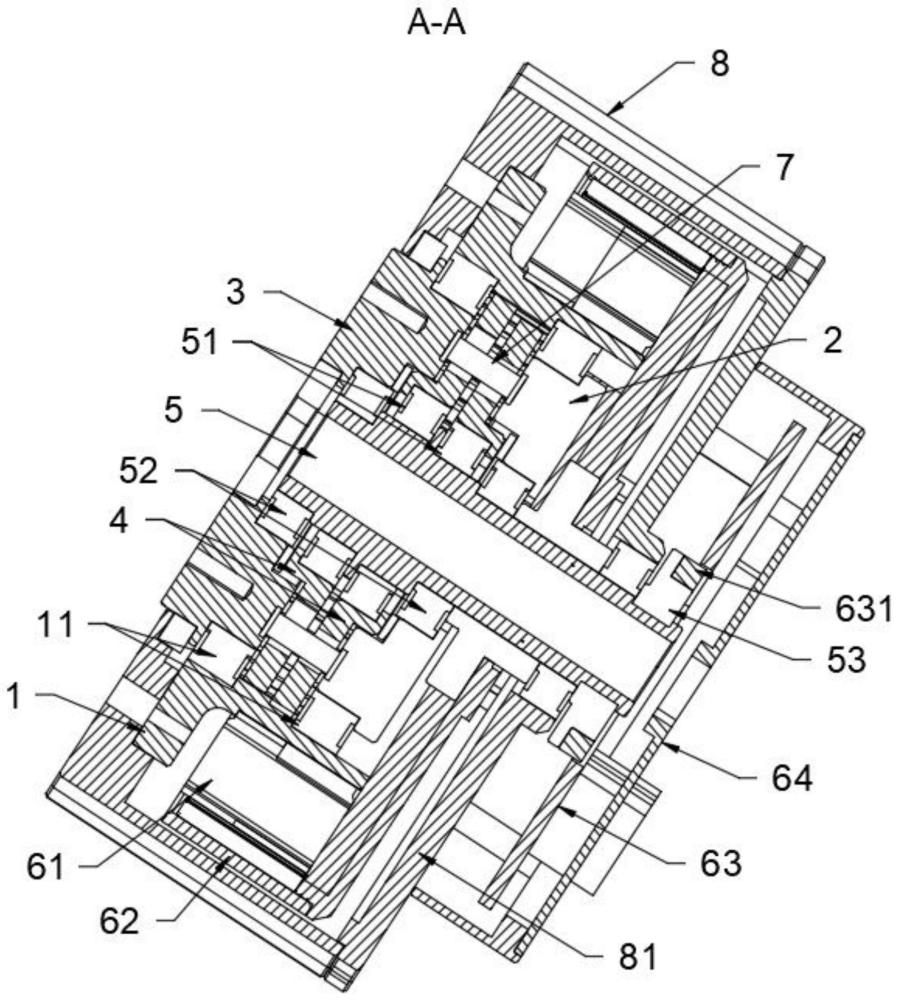
4、为实现上述目的,本发明提供如下技术方案:一种紧凑型摆线关节模组,包括针齿壳、分别转动安装在所述针齿壳两端的输入盘和输出盘、在所述针齿壳内转动并与所述针齿壳啮合的摆线盘、依次贯穿于所述输入盘和所述摆线盘并与所述输出盘相连的偏心轴以及设置在针齿壳上对应所述输入盘一端的输入机构,所述偏心轴与所述输入盘、摆线盘和所述输出盘转动连接。其中,为了降低关节模组的整体长度,所述输入机构包括固定套装在所述针齿壳外侧的电机定子以及套装在所述电机定子外侧并与所述偏心轴固定连接的转子件。
5、优选的,所述输入盘上设置有至少两个呈环形阵列分布的销柱,所述销柱贯穿于所述摆线盘并与所述输出盘相连。
6、优选的,所述偏心轴上对应所述摆线盘的位置处套装有偏心套,所述偏心轴对应所述输入盘和所述输出盘的位置处均套装有第一轴承。
7、优选的,所述针齿壳上对应所述输入盘和所述输出盘的位置处均设置有第二轴承。
8、优选的,所述针齿壳上安装有套装在所述转子件外侧的壳体,所述壳体与所述针齿壳靠近所述输出盘的一端固定连接;
9、所述壳体远离所述输出盘的一端固定安装有套装在所述偏心轴上的封盖。
10、优选的,所述输入机构还包括固定设置在所述封盖上的驱动板以及套装在所述驱动板的外侧并与封盖固定连接的端盖;
11、所述偏心轴对应所述驱动板的一端固定套装有磁铁,所述驱动板上对应所述磁铁的外侧固定安装有编码器,所述编码器与所述驱动板的输入端相连。
12、(三)有益效果
13、该摆线关节模组通过将电机定子和转子件依次套装在减速部分的针齿壳外侧,其中转子件与偏心轴固定连接以驱动偏心轴转动,能够有效的缩短关节模组的整体长度,从而降低机器人的整体宽度,缩小机器人的体积的同时,提高机器人整体的美观性。
技术特征:
1.一种紧凑型摆线关节模组,包括针齿壳(1)、分别转动安装在所述针齿壳(1)两端的输入盘(2)和输出盘(3)、在所述针齿壳(1)内转动并与所述针齿壳(1)啮合的摆线盘(4)、依次贯穿于所述输入盘(2)和所述摆线盘(4)并与所述输出盘(3)相连的偏心轴(5)以及设置在针齿壳(1)上对应所述输入盘(2)一端的输入机构(6),所述偏心轴(5)与所述输入盘(2)、摆线盘(4)和所述输出盘(3)转动连接;
2.根据权利要求1所述的紧凑型摆线关节模组,其特征在于:所述输入盘(2)上设置有至少两个呈环形阵列分布的销柱(7),所述销柱(7)贯穿于所述摆线盘(4)并与所述输出盘(3)相连。
3.根据权利要求1所述的紧凑型摆线关节模组,其特征在于:所述偏心轴(5)上对应所述摆线盘(4)的位置处套装有偏心套(51),所述偏心轴(5)对应所述输入盘(2)和所述输出盘(3)的位置处均套装有第一轴承(52)。
4.根据权利要求1所述的紧凑型摆线关节模组,其特征在于:所述针齿壳(1)上对应所述输入盘(2)和所述输出盘(3)的位置处均设置有第二轴承(11)。
5.根据权利要求1所述的紧凑型摆线关节模组,其特征在于:所述针齿壳(1)上安装有套装在所述转子件(62)外侧的壳体(8),所述壳体(8)与所述针齿壳(1)靠近所述输出盘(3)的一端固定连接;
6.根据权利要求5所述的紧凑型摆线关节模组,其特征在于:所述输入机构(6)还包括固定设置在所述封盖(81)上的驱动板(63)以及套装在所述驱动板(63)的外侧并与封盖(81)固定连接的端盖(64);
技术总结
本发明公开了一种紧凑型摆线关节模组,属于机器人关节领域,该关节模组包括针齿壳、分别转动安装在针齿壳两端的输入盘和输出盘、在针齿壳内转动并与针齿壳啮合的摆线盘、依次贯穿于输入盘和摆线盘并与输出盘相连的偏心轴以及设置在针齿壳上对应输入盘一端的输入机构,偏心轴与输入盘、摆线盘和输出盘转动连接;输入机构包括固定套装在针齿壳外侧的电机定子以及套装在电机定子外侧并与偏心轴固定连接的转子件。该摆线关节模组通过将电机定子和转子件依次套装在减速部分的针齿壳外侧,能够有效的缩短关节模组的整体长度,从而降低机器人的整体宽度,缩小机器人的体积的同时,提高机器人整体的美观性。
技术研发人员:李齐,李自生,吴业胜,李鹏飞,唐雪琛
受保护的技术使用者:苏州脉塔智能科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!