可手内操作的机器人末端执行器的制作方法
本发明涉及机器人末端执行器的,尤其涉及可手内操作的机器人末端执行器。
背景技术:
1、为保证正常的生产和生活,提高电网供电的可靠性,有时需要对电网中的配网设备进行带电断、接引作业,对配网设备的带电作业是一项十分危险的作业项目,由于配网设备往往结构紧凑、安全距离裕度小,导致引流线解搭头时易造成相间、相地短路,极易造成设备的损害和人员的伤亡,电网系统经过多年的发展,已经有了人工作业和使用机械手作业等技术方式来完成带电断、接引作业,但是仍然存在不少尚未解决的问题。
2、人工作业常采用一种方法是手套法作业,作业人员基于绝缘斗臂车对地进行绝缘隔离,穿戴绝缘服和绝缘手套并对裸露导线、金具、横担、电杆等带电设备进行绝缘遮蔽后开展带电作业工作;另一种则是作业人员使用绝缘操作杆进行带电断、接引作业。在对配电设备进行操作时,受周围复杂环境和紧凑的线路结构的影响,人工作业的开展难度往往很大,并且由于带电作业具有很高的危险性,作业人员的人身安全也难以得到保证。
3、目前的机械手作业技术在电网中的应用降低了带电设备的危险性,利用多自由度的机械手可以协助完成导线清洁、螺栓紧固、线夹安装等任务。目前用于电网中的机械手可以完成移动和旋转等动作,但是在夹持中无法进行更加精细的手内操作,往往会受到电网结构紧凑的线路结构的影响,同时由于机械手指指骨往往是刚性的,对电网中设备进行操作时容易出现夹持不稳的情况。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有的带电作业具有很高的危险性,传统人工进行带电断、接引流线作业时作业人员的自身安全难以得到保证的问题,提出了可手内操作的机器人末端执行器。
3、为解决上述技术问题,本发明提供如下技术方案:执行部件,包括机械臂,设置于所述机械臂上的第一电机,设置于所述机械臂上的夹持组件,以及设置于所述夹持组件上的驱动组件;
4、检测部件,包括设置于所述夹持组件上的感应组件,以及设置于所述感应组件上的提醒组件。
5、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述夹持组件,包括设置于所述第一电机上的机械手底盘,设置于所述机械手底盘上的第一立架,以及设置于所述第一立架上的夹取件。
6、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述夹取件,包括设置于所述第一立架上的第一支架,设置于所述第一支架上的正时皮带轮,设置于第一支架上的第二电机,设置于所述正时皮带轮上的手指骨干,设置于所述手指骨干上的第一轴承,以及设置于所述手指骨干上的第二轴承。
7、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述手指骨干的内部采用鳍条结构,在抓取物体时发生弯曲,贴合不同物体的形状。
8、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述驱动组件,包括设置于所述机械手底盘上的第三电机,设置于所述第三电机上的主动齿轮,设置于所述主动齿轮上的从动齿轮,以及设置于所述手指骨干上的正时滚轮。
9、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述感应组件,包括设置于所述第一立架上的第一滚轮,设置于所述正时皮带轮上的若干第一气囊,设置于所述第一气囊上的标记件;
10、所述第一气囊均匀排布在正时皮带轮上,所述标记件设置在第一气囊内。
11、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述标记件,包括设置于所述第一气囊内的第一磁块,设置于所述第一气囊内的容置胶囊,以及所述容置胶囊内填充有显色溶液。
12、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述容置胶囊的材质为明胶,其分子结构稳定,且具有较高的稳定性和耐热性。
13、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述提醒组件,包括设置于所述第一支架上的第一转柱,开设于所述第一转柱上的第一空腔,以及设置于所述第一空腔内的响应件。
14、作为本发明所述可手内操作的机器人末端执行器的优选方案,其中:所述响应件,包括设置于所述第一空腔内的响应弹管,设置于所述第一空腔内的第二磁块,以及设置于所述第一空腔内的第一铁块。
15、本发明的可手内操作的机器人末端执行器的有益效果为:本机械手动作灵活,除了完成现有机械手可以完成的动作外,还可以进行手内操作,可以在更小的范围内进行更有效的工作,解决了由于电网结构线路紧凑,机械手的动作幅度往往不可以太大的技术难题,同时,采用柔性手指骨干,安装有正时带的手指,表面粗糙度更大的同时,针对不同的物体形状可以产生不同的形状,更加贴合零件表面,使得零件抓握可以更加稳固,提高带电作业的工作效率。
16、附图说明
17、为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。其中:
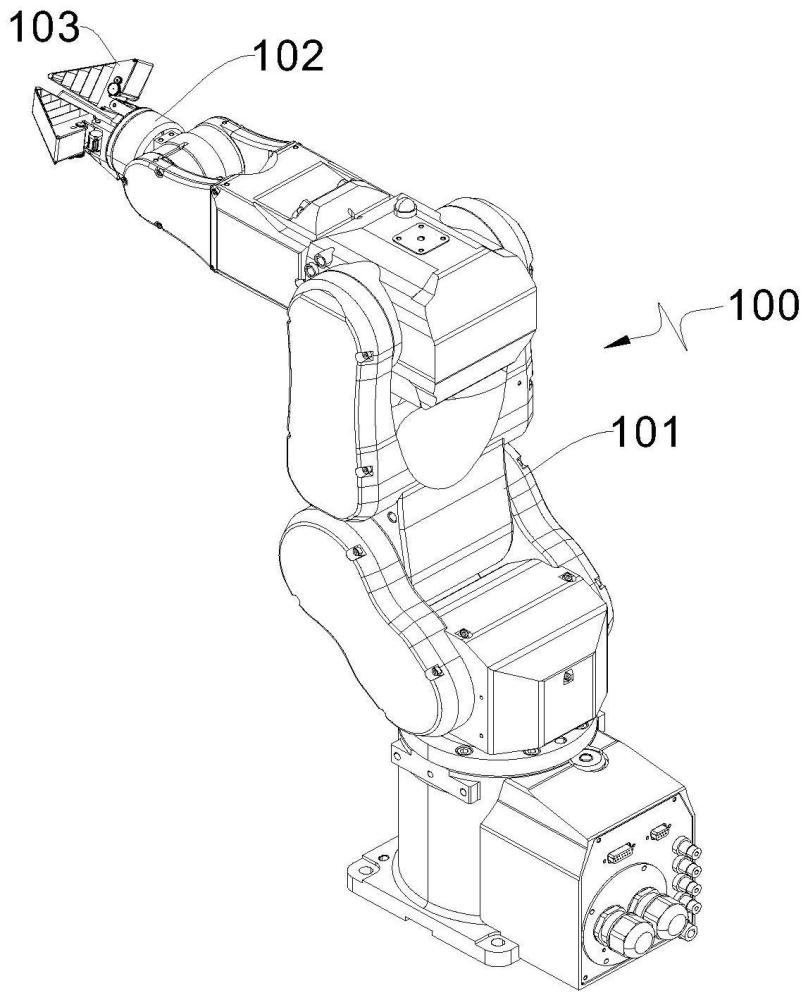
18、图1为本发明中可手内操作的机器人末端执行器的整体结构示意图。
19、图2为本发明中夹持组件的整体结构示意图。
20、图3为本发明中夹持组件的局部拆解图。
21、图4为本发明中机械手底盘的立体结构图。
22、图5为本发明中图3中a部分的放大图。
23、图6为本发明中手指骨干的立体结构图。
24、图7为本发明基于鳍条的柔顺手指骨干原理图。
25、图8为本发明中提醒组件的内部结构图。
26、图9为本发明中正时皮带轮的内部结构图。
技术特征:
1.可手内操作的机器人末端执行器,其特征在于:包括,
2.如权利要求1所述的可手内操作的机器人末端执行器,其特征在于:所述夹持组件(103),包括设置于所述第一电机(102)上的机械手底盘(103a),设置于所述机械手底盘(103a)上的第一立架(103b),以及设置于所述第一立架(103b)上的夹取件(103c)。
3.如权利要求2所述的可手内操作的机器人末端执行器,其特征在于:所述夹取件(103c),包括设置于所述第一立架(103b)上的第一支架(103c-1),设置于所述第一支架(103c-1)上的正时皮带轮(103c-2),设置于第一支架(103c-1)上的第二电机(103c-3),设置于所述正时皮带轮(103c-2)上的手指骨干(103c-4),设置于所述手指骨干(103c-4)上的第一轴承(103c-5),以及设置于所述手指骨干(103c-4)上的第二轴承(103c-6)。
4.如权利要求3所述的可手内操作的机器人末端执行器,其特征在于:所述手指骨干(103c-4)的内部采用鳍条结构,在抓取物体时发生弯曲,贴合不同物体的形状。
5.如权利要求4所述的可手内操作的机器人末端执行器,其特征在于:所述驱动组件(104),包括设置于所述机械手底盘(103a)上的第三电机(104a),设置于所述第三电机(104a)上的主动齿轮(104b),设置于所述主动齿轮(104b)上的从动齿轮(104c),以及设置于所述手指骨干(103c-4)上的正时滚轮(104d)。
6.如权利要求5所述的可手内操作的机器人末端执行器,其特征在于:所述感应组件(201),包括设置于所述第一立架(103b)上的第一滚轮(201a),设置于所述正时皮带轮(103c-2)上的若干第一气囊(201b),设置于所述第一气囊(201b)上的标记件(201c);
7.如权利要求6所述的可手内操作的机器人末端执行器,其特征在于:所述标记件(201c),包括设置于所述第一气囊(201b)内的第一磁块(201c-1),设置于所述第一气囊(201b)内的容置胶囊(201c-2),以及所述容置胶囊(201c-2)内填充有显色溶液。
8.如权利要求7所述的可手内操作的机器人末端执行器,其特征在于:所述容置胶囊(201c-2)的材质为明胶,其分子结构稳定,且具有较高的稳定性和耐热性。
9.如权利要求8所述的可手内操作的机器人末端执行器,其特征在于:所述提醒组件(202),包括设置于所述第一支架(103c-1)上的第一转柱(202a),开设于所述第一转柱(202a)上的第一空腔(202b),以及设置于所述第一空腔(202b)内的响应件(202c)。
10.如权利要求9所述的可手内操作的机器人末端执行器,其特征在于:所述响应件(202c),包括设置于所述第一空腔(202b)内的响应弹管(202c-1),设置于所述第一空腔(202b)内的第二磁块(202c-2),以及设置于所述第一空腔(202b)内的第一铁块(202c-3)。
技术总结
本发明公开了可手内操作的机器人末端执行器,执行部件,包括机械臂,设置于所述机械臂上的第一电机,设置于所述机械臂上的夹持组件,以及设置于所述夹持组件上的驱动组件;检测部件,包括设置于所述夹持组件上的感应组件,以及设置于所述感应组件上的提醒组件,可以在更小的范围内进行更有效的工作,解决了由于电网结构线路紧凑,机械手的动作幅度往往不可以太大的技术难题,同时,采用柔性手指骨干,安装有正时带的手指,表面粗糙度更大的同时,针对不同的物体形状可以产生不同的形状,更加贴合零件表面,使得零件抓握可以更加稳固,提高带电作业的工作效率。
技术研发人员:杨润东,王洪武,赵维谚,陈康,杨长旺,符宗锐,马大鹏,杨腾,张雯娟,郑瑞东,罗哲轩,姜立超,王雪涛
受保护的技术使用者:云南电网有限责任公司输电分公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!