机械臂标定装置的制作方法
本说明书涉及标定,尤其涉及一种机械臂标定装置。
背景技术:
1、随着机器人技术、控制技术和传感器技术的发展,智能机器人越来越广泛地应用于诸多行业,比如机械加工,航天航空,军事工业,医疗设备等。智能机器人通常要求具有一定的绝对定位精度和重复定位精度,为了满足以上要求,在智能机器人的生产装配过程中就要对各个关节(例如,机械臂)进行关节标定。而标定方法的精度和便捷性不仅影响了智能机器人的性能,同时也影响了智能机器人生产的效率和成本。
2、基于上述原因,本说明书提供一种机械臂标定装置,该机械臂标定装置的各个关节能够与机械臂的各个关节精密接合,消除了采用刻线标定法时产生的精度误差,只产生机械臂标定装置与机械臂装配时标定误差,使得最终的标定精度相对可控,可以满足更多的智能机器人的标定要求。
技术实现思路
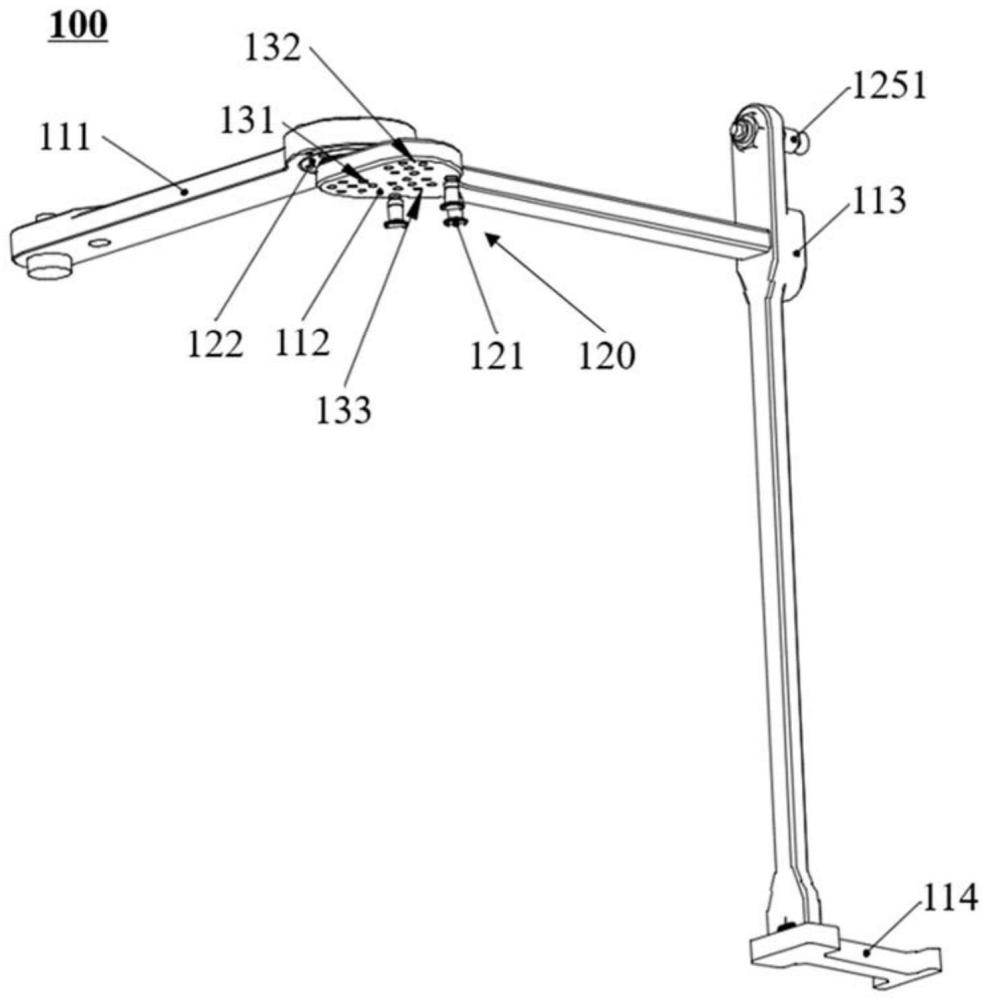
1、本说明书的实施例之一提供一种机械臂标定装置,包括多个标定臂和定位组件,所述多个标定臂依次活动连接,所述多个标定臂之间的相对位置以及所述多个标定臂与所述机械臂之间的相对位置均通过所述定位组件固定;所述多个标定臂中的至少两个相邻连接的所述标定臂之间的夹角呈第一角度设置。
技术特征:
1.一种机械臂标定装置,其特征在于,包括多个标定臂和定位组件,所述多个标定臂依次活动连接,所述多个标定臂之间的相对位置以及所述多个标定臂与所述机械臂之间的相对位置均通过所述定位组件固定;所述多个标定臂中的至少两个相邻连接的所述标定臂之间的夹角呈第一角度设置。
2.根据权利要求1所述的机械臂标定装置,其特征在于,所述多个标定臂至少包括第一标定臂和第二标定臂,所述第一标定臂和所述第二标定臂转动连接;
3.根据权利要求2所述的机械臂标定装置,其特征在于,所述第二标定臂包括多个安装位置,所述第一标定臂转动连接于所述多个安装位置中的其中一个所述安装位置。
4.根据权利要求3所述的机械臂标定装置,其特征在于,所述第一定位件包括第一柱塞;所述第一标定臂通过至少一个所述第一柱塞连接于所述多个安装位置中的其中一个所述安装位置。
5.根据权利要求2所述的机械臂标定装置,其特征在于,所述多个标定臂还包括第三标定臂和第四标定臂,所述第二标定臂和所述第三标定臂可移动地连接,所述第三标定臂和所述第四标定臂可移动地连接;所述定位组件还包括第二定位件,所述第二标定臂、所述第三标定臂和所述第四标定臂与所述机械臂之间的相对位置均通过所述第二定位件固定。
6.根据权利要求5所述的机械臂标定装置,其特征在于,所述第二标定臂与所述第三标定臂之间的夹角呈90度,和/或,所述第三标定臂与所述第四标定臂之间的夹角呈90度。
7.根据权利要求5所述的机械臂标定装置,其特征在于,还包括第一距离调节装置,所述第一距离调节装置被配置为调节所述第二标定臂在所述第三标定臂延伸方向上的移动距离,和/或所述第一距离调节装置被配置为调节所述第三标定臂在所述第二标定臂延伸方向上的移动距离。
8.根据权利要求5所述的机械臂标定装置,其特征在于,还包括第二距离调节装置,所述第二距离调节装置被配置为调节所述第三标定臂在所述第四标定臂延伸方向上的移动距离,和/或所述第二距离调节装置被配置为调节所述第四标定臂在所述第三标定臂延伸方向上的移动距离。
9.根据权利要求5所述的机械臂标定装置,其特征在于,所述第二定位件包括第二柱塞,所述第二柱塞的延伸方向与所述第二标定臂的延伸方向平行,当所述第二柱塞连接所述第三标定臂与所述机械臂,且所述第四标定臂远离所述第三标定臂的一端与所述机械臂抵接时,所述第二标定臂和所述第二标定臂与所述机械臂的相对位置固定。
10.根据权利要求5所述的机械臂标定装置,其特征在于,所述第二定位件还包括:
技术总结
本说明书一个或多个实施例涉及一种机械臂标定装置,包括多个标定臂和定位组件,多个标定臂依次活动连接,多个标定臂之间的相对位置以及多个标定臂与机械臂之间的相对位置均通过定位组件固定;多个标定臂中的至少两个相邻连接的标定臂之间的夹角呈第一角度设置。
技术研发人员:王挺,修玉香,闻嘉鼎,王元军
受保护的技术使用者:宁波睿达医疗器械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!