一种基于视觉定位的电机端盖搬运机器人及工作方法与流程
本发明涉及机器人,尤其是指一种基于视觉定位的电机端盖搬运机器人及工作方法。
背景技术:
1、电机端盖用于通过端盖连接到固定电机定子的外壳上,保证转子与定子的间隙,一般是铸铁工艺或者板材冲压成型。在传统技术中,电机端盖在仓库、生产车间等室内的搬运一般通过人工进行搬运,其耗费的人力较多。
2、为了解决上述传统技术中的问题,现有技术提出了用于搬运电机端盖的电机端盖搬运机器人。在现有的电机端盖搬运机器人中,一般是在自动导引车(英文全称:automatedguided vehicle,简称:agv)上安装机械臂,机械臂上设有夹取装置(如夹爪或机械手),通过夹取装置来对电机端盖进行夹取并搬运,但是采用这种现有的电机端盖搬运机器人进行电机端盖夹取和搬运时,存在以下缺陷:
3、(1)难以控制夹取装置对电机端盖对夹持力度,且容易损坏电机端盖。如,当夹取装置对电机端盖夹持的力度过大,则容易压伤电机端盖导致产生碎屑污染、甚至压坏电机端盖的现象发生;而当夹取装置对电机端盖夹持的力度过小,则会降低夹持装置夹持电机端盖的稳固可靠性,从而容易发生电机端盖从夹持装置上滑脱跌落、进而导致电机端盖损坏的现象。(2)自动导引车运动精度不高,机械臂按预定轨迹难以将电机端盖放置到预定位置,容易在放置时发生磕碰导致电机端盖发生损坏,在电机端盖产生划痕。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中电机端盖搬运机器人夹取不便、搬运精度不高、易发生搬运事故等技术问题。
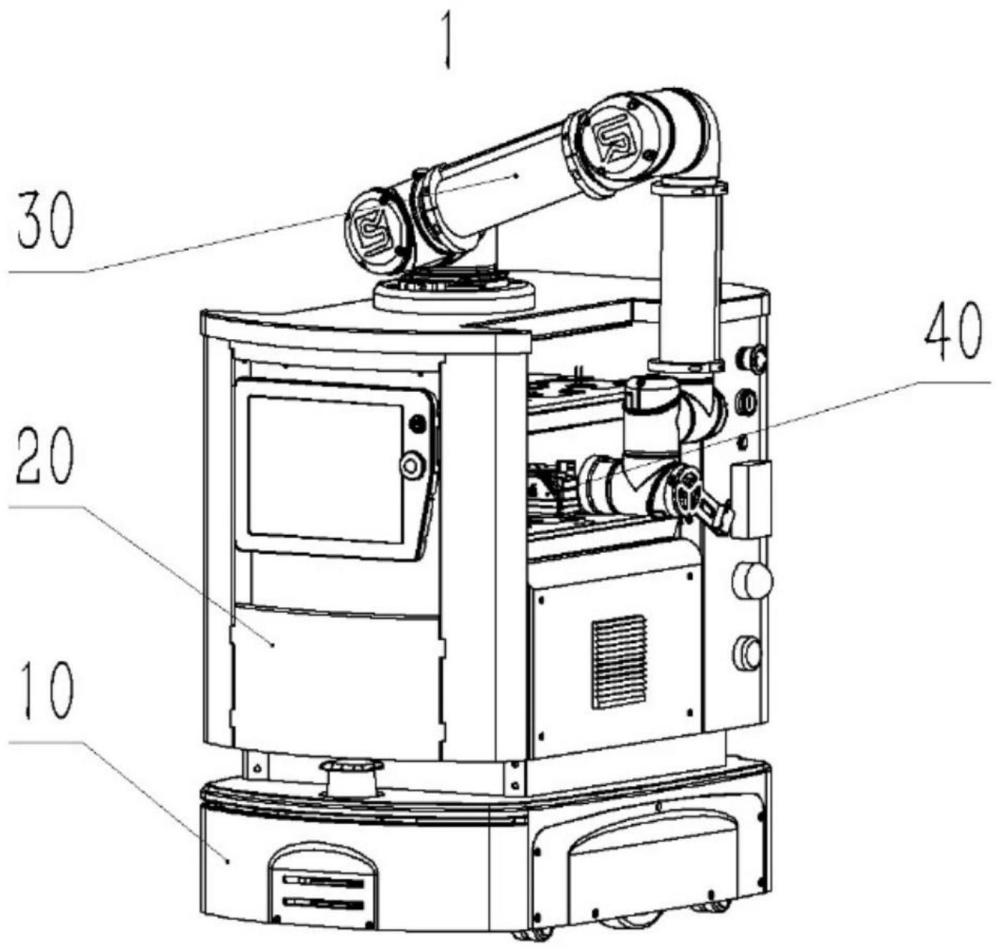
2、为解决上述技术问题,本发明提供了一种基于视觉定位的电机端盖搬运机器人,包括:
3、自动导引车;
4、电机端盖承载装置,用于装载电机端盖,其设置在自动导引车上由所述自动导引车控制运动;
5、托持装置,设置在电机端盖承载装置的上方,用于夹取电机端盖;所述托持装置包括夹持装置和视觉定位检测系统,所述视觉定位检测系统设置在所述托持装置的顶部,并通过视觉定位方法反馈托持装置的位置信息,精确控制托持装置运动至电机端盖的位置处进行夹取电机端盖和精确控制托持装置夹持电机端盖运动至指定位置进行放置电机端盖;所述视觉定位方法包括:通过对图像采集系统采集的图像进行预处理和图像优化,获得理想的目标区域;采用视觉定位算法获取标记点的位置信息和角度信息,再与基准位置作对比,获得坐标差值和角度差值;其中,所述标记点为料板上用于定位电机端盖的定位孔;
6、机械臂,包括底座和六轴机械臂,所述底座与所述电机端盖承载装置连接,所述六轴机械臂的一端固定在所述底座上,另一端与所述托持装置连接,用于驱动所述托持装置运动。
7、在本发明的一个实施例中,所述电机端盖承载装置包括座体以及设置在所述座体内的电机端盖承载平台,所述电机端盖承载平台内设有电机端盖容置槽和用于监测容置槽内是否装载有电机端盖以及定位其位置的检测组件;其中,所述容置槽具有用于支撑所述电机端盖的槽底壁和凸设于所述槽底壁边缘以用于对所述电机端盖进行限位的槽侧壁;所述检测组件包括一个探测器,所述探测器则设置在槽底壁正中心,用于精确的定位电机端盖相对于容置槽的位置。
8、在本发明的一个实施例中,所述座体包括第一竖向延伸部,第二竖向延伸部、横向延伸部和机架顶罩;所述第一竖向延伸部、所述第二竖向延伸部通过所述横向延伸部连接在一起,所述机架顶罩设置在所述第一竖向延伸部、所述第二竖向延伸部和所述横向延伸部的上方构成容纳所述电机端盖承载平台的容腔。
9、在本发明的一个实施例中,所述探测器为漫反射式光电传感器或者光耦合器或者超声波传感器。由于漫反射式光电传感器或者光耦合器或者超声波传感器等具有快速反应、探测准确等特点,可以快速、精准地探测到容置槽内是否承载有电机端盖;通过在容置槽里设置探测器可以有效判断容置槽里是否装载了电机端盖,当电机端盖承载装置用于自动化搬运的场景时,可以快速判断哪个容置槽里已经装载了电机端盖,从而减少搬运动作,提高搬运效率。
10、在本发明的一个实施例中,所述夹持装置包括四个夹爪和夹爪连接装置,四个夹爪间隔相对设置,夹爪连接装置将四个夹爪连接在一起;所述夹爪上设有槽口,所述夹爪侧端上分别设有第一光电传感器和第二光电传感器;所述夹爪末端设置锯齿。当夹持装置采用环抱夹取的方式夹取电机端盖,电机端盖处于四个夹爪形成的空腔中,因此可以有效避免了由于托持装置对夹取力度控制不当导致电机端盖脱落等不良现象的发生,保障电机端盖承夹于托持装置上的稳固可靠性。电机端盖包括四个电机端盖外凸,为了避免四个夹爪侧端夹取电机端盖外凸;第一光电传感器和第二光电传感器用于判断夹爪侧端是否会夹取电机端盖上一侧的电机端盖外凸,确保电机端盖在正向放置与反向放置的情况下,电机端盖外凸都不会被夹取,从而充分保证电机端盖承夹于托持装置上的稳固可靠性。当电机端盖滑落时,可由锯齿夹紧,在垂直方向不会进行滑动,有效地防止电机端盖在搬运过程中脱落。
11、在本发明的一个实施例中,所述图像优化方法为直方图均衡化处理。
12、在本发明的一个实施例中,所述视觉定位获取标记点位置定位方法的具体步骤为:首先通过图像采集系统拍摄图像,对标记点边缘的图像进行处理,然后基于边缘提取技术获得圆边缘的图像信息,结合图像处理算法拟合出圆,计算出圆心的坐标和孔的直径等目标数据,实现了标记点的位置定位;其中,圆形拟合算法步骤为:
13、1):从所有n个轮廓点中随机的选取3个轮廓点;
14、2):根据所选轮廓点的坐标,求得圆的三个模型参数;
15、3):计算所有n个轮廓点与第2步所求模型参数的拟合残差,当残差的大小低于所设阈值εmax,则将所选轮廓点视为内点,同时保存内点的数目为k;
16、4):当内点的个数k大于或等于所设阈值nmin时,算法就认为已经知道了合适正确的拟合圆的参数,然后通过对其中所有的内点进行最小二乘化,得到最终的圆拟合结果;
17、5):当内点的个数k小于所设阈值nmin时,算法继续,重复1、2、3步骤进行下一次迭代;迭代次数达到m次之后,若还不能找到正确模型的参数,则拟合失败。
18、在本发明的一个实施例中,所述视觉定位获取标记点角度定位方法具体步骤为:首先进行预处理滤波,然后进行图像分割以及灰度变换,再经过形态学处理后进行直线边缘提取;根据拟合的直线边缘,通过数学运算求得此时标记点的实际角度,从而与基准位置的角度进行对比,得到需要旋转的角度大小进行位置的修正,完成标记点的角度定位。
19、基于上述机构,电机端盖搬运机器人的工作方法,具体步骤如下:
20、(a)、电机端盖搬运机器人行驶至装载有电机端盖的货架旁侧,自动导引车停止运动,机械臂启动;
21、(b)、机械臂在托持装置上的视觉定位检测系统的导引下动作并驱动托持装置运动,直至托持装置的两个夹爪侧端运动至一个电机端盖的正上方;
22、(c)、机械臂再驱动托持装置下降运动,进行托持装置的夹取动作,同时通过视觉定位检测系统对电机端盖进行检测定位;
23、(d)、机械臂驱动托持装置夹取电机端盖运动,并将电机端盖夹取至座体的一个容置槽中;
24、(e)、当电机端盖放置于座体的一个容置槽后,机械臂控制托持装置下降运动以松开对电机端盖的夹取,这样即完成了装载一个电机端盖的动作;
25、(f)、机械臂继续控制托持装置进行其他电机端盖的夹取和搬运,直至电机端盖承载装置上的容置槽已经满载电机端盖,随后机械臂收缩至电机端盖搬运系统1中,在机械臂占据空间达到最小状态后,机械臂停止运动,自动导引车启动,电机端盖搬运系统搭载电机端盖行驶至目的地;
26、(g)、机械臂启动,并按步骤(b)至(f)的动作,将电机端盖从电机端盖承载装置中卸下,并放至指定的目的地,即可完成电机端盖的搬运。
27、本发明的上述技术方案相比现有技术具有以下优点:
28、本发明所述的本发明提供了一种基于视觉定位的电机端盖搬运机器人及工作方法,将agv小车与机械臂结合在一起作为电机端盖搬运系统,该系统实现了技术的结合,发挥了各自的优点,同时弥补了各方所存在的不足,能够快速准确放置电机端盖,实现了对电机端盖的搬运、抓取以及放置,实现电机端盖的自动化上下料,大大降低人力搬运成本,在实际应用中具有极大的经济效益;托持装置的视觉定位系统能够获得完整的图像信息,有效提高视觉定位的效率,减少了系统算法耗时,提高了电机端盖下料过程中的系统稳定性,大大提高了电机端盖的成品率。
- 还没有人留言评论。精彩留言会获得点赞!