一种并联机器人运动学模型在线学习方法与流程
本发明涉及一种并联机器人运动学模型在线学习方法,属于并联机器人标定。
背景技术:
1、stewart平台作为一种先进的六自由度并联机械结构和控制系统,被广泛应用于航空航天、模拟器系统、精密定位和机器人操作等领域。它的高精度运动和定位能力使其成为许多领域中重要的工具和设备。然而,近年来,随着精度和定位的要求不断提高,原位测量系统认知的不断完善,愈来愈多的场合迫切需要stewart平台拥有更高精度的空间轨迹运动与实时校准能力,但由于制造误差、装配误差以及六自由度并联机器人校准过程中,传感器引入的观测误差等因素存在,stewart平台的性能受到一定的影响。为确保stewart平台在空间轨迹下的精确运动,运动学参数的实时估计是必不可少的步骤。
技术实现思路
1、本发明的目的在于,提供一种并联机器人运动学模型在线学习方法。用于解决现有技术存在的技术问题。
2、本发明的技术方案:一种并联机器人运动学模型在线学习方法,所述校准方法包括以下步骤:
3、s1:将靶标紧固于运动平台和静平台的表面,且保证测量靶标均匀分布在以典型六自由度并联机器人stewart平台的运动台面和静止台面表面为圆心的圆周上;
4、s2:控制stewart平台的运动台面输出六自由度运动轨迹,使平台实现x、y及z轴的移动或旋转;
5、s3:搭建一套原位测量系统,并用视觉测量仪器验证原位测量系统的精度是否满足stewart平台运动台面的位姿测量,验证通过后stewart平台的运动台面实时位姿由原位测量系统获取;
6、s4:基于并联机器人运动学原理,通过闭环矢量环法,构建运动学参数误差模型;
7、s5:基于运动学误差模型与原位测量系统实时获取stewart平台的实际位姿数据,采用一种在线学习的优化算法实时估计出stewart平台的42个运动学参数。
8、前述的一种并联机器人运动学模型在线学习方法中,所述步骤s1中,将靶标紧固于运动平台和静平台的表面,且均匀分布在六自由度并联机器人stewart平台的运动台面和静止台面并保证运动台面与静止台面中心法线穿过靶标圆的中心。
9、前述的一种并联机器人运动学模型在线学习方法中,所述步骤s2中,基于stewart平台在不同运动轨迹下的定点运动,具体包括:
10、(1)stewart运动平台基于静平台的x、y及z轴的移动
11、首先,基于运动平台与静平台表面中心建立动坐标系b与p;然后,通过控制stewart平台的各支链进行伸缩运动,使运动平面分别沿x、y及z轴移动;
12、(2)基于运动平台的x、y及z轴的旋转
13、首先,基于运动平台与静平台表面中心建立动坐标系b与p;然后,通过控制stewart平台的各支链进行伸缩运动,使运动平面分别沿x、y及z轴旋转,结合运动平台的移动,可实现stewart平台在不同运动轨迹下的定点运动。
14、前述的一种并联机器人运动学模型在线学习方法中,所述步骤s3中,具体包括:
15、(1)搭建一套原位测量系统,该系统包括六个测量支链,并将其与stewart平台进行集成,当stewart平台执行定点运动时,控制器会精确读取六个支链的伸缩长度,并通过运动学正解方法计算当前运动台面的精确位姿;
16、(2)在stewart平台的运动平面上贴附用于视觉测量的靶标,靶标为方块,其各面均有不同的编码信息,靶标与运动平面具有一致的运动特性,通过视觉测量仪器对靶标位置的变化进行测量,具体包括:利用视觉仪器测量stewart的运动平台沿x、y及z轴的位置数据;
17、(3)利用视觉仪器测量stewart平台的位置数据后,将静平面的坐标系p设为工作坐标系,可得出运动平面坐标系b相对于静坐标系p的俯仰、横滚及偏航轴的夹角,可获得姿态数据,结合上述的位置数据与姿态数据从而获得实际的位姿数据;
18、(4)利用视觉测量仪器测得的位姿数据与原位测量系统获取的位姿数据进行比对,验证原位测量系统是否满足位姿测量的精度要求;
19、(5)满足精度要求后,后续stewart平台的位姿由原位测量系统获取。
20、前述的一种并联机器人运动学模型在线学习方法中,所述步骤s4中,具体包括:
21、基于stewart平台的运动学标定,建立运动学参数模型,构造实测信息与模型输出之间的误差泛函,stewart平台的运动学参数模型:
22、δe=jpδx (1)
23、上述δe为6x1位姿误差向量,jp是6x42的误差雅可比矩阵,δx是42x1运动学参数向量,式(1)为stewart平台的运动学参数模型。
24、前述的一种并联机器人运动学模型在线学习方法中,针对于并联机器人运动学参数的实时估计,本发明方法采用一种在线学习的优化算法,算法如下:
25、(1)基于公式(1),令xk-1|k-1=δx,jk=jp,递推最小二乘算法公式如下:
26、1)状态转移方程为:
27、xk|k-1=xk-1|k-1 (2)
28、其中xk-1|k-1代表第k-1次的运动学参数的先验估计,xk|k-1代表后验估计;
29、2)协方差矩阵方程为:
30、pk|k-1=pk-1|k-1+qk-1 (3)
31、其中pk-1|k-1为42x42的协方差矩阵,qk-1为42×42系统噪声协方差矩阵,在初始时刻pk-1|k-1与qk-1可赋予初值;
32、3)观测方程为:
33、yk=jkxk+ek. (4)
34、其中位姿误差向量yk为原位测量系统测量stewart运动平台得到,维度为6x1,ek为6x1观测噪声向量;
35、4)增益可表示为:
36、
37、其中kk为42x6的增益矩阵,为6x6的测量噪声协方差矩阵,在初始时刻rk可赋予初值;
38、5)状态更新方程为:
39、xk|k=xk|k-1+kk(yk-jkxk|k-1). (6)
40、6)协方差更新方程为:
41、
42、其中i为42x42的单位矩阵,λ为遗忘因子;
43、(2)基于递推最小二乘算法的运动学参数估计方法包括以下步骤:
44、(2-1):给定xk-1|k-1,qk-1,pk-1|k-1,rk的初值;
45、(2-2):通过原位测量系统,实时测量stewart的位姿得到位姿误差向量yk;
46、(2-3):通过上述信息求取增益kk;
47、(2-4):通过状态更新方程求取状态估计值xk|k,并更新协方差矩阵pk;
48、(2-5):判断状态估计值xk|k是否满足迭代停止的条件。
49、在给定理论位姿与实测位姿下通过步骤(2-5)实现stewart平台的运动学参数实时估计。
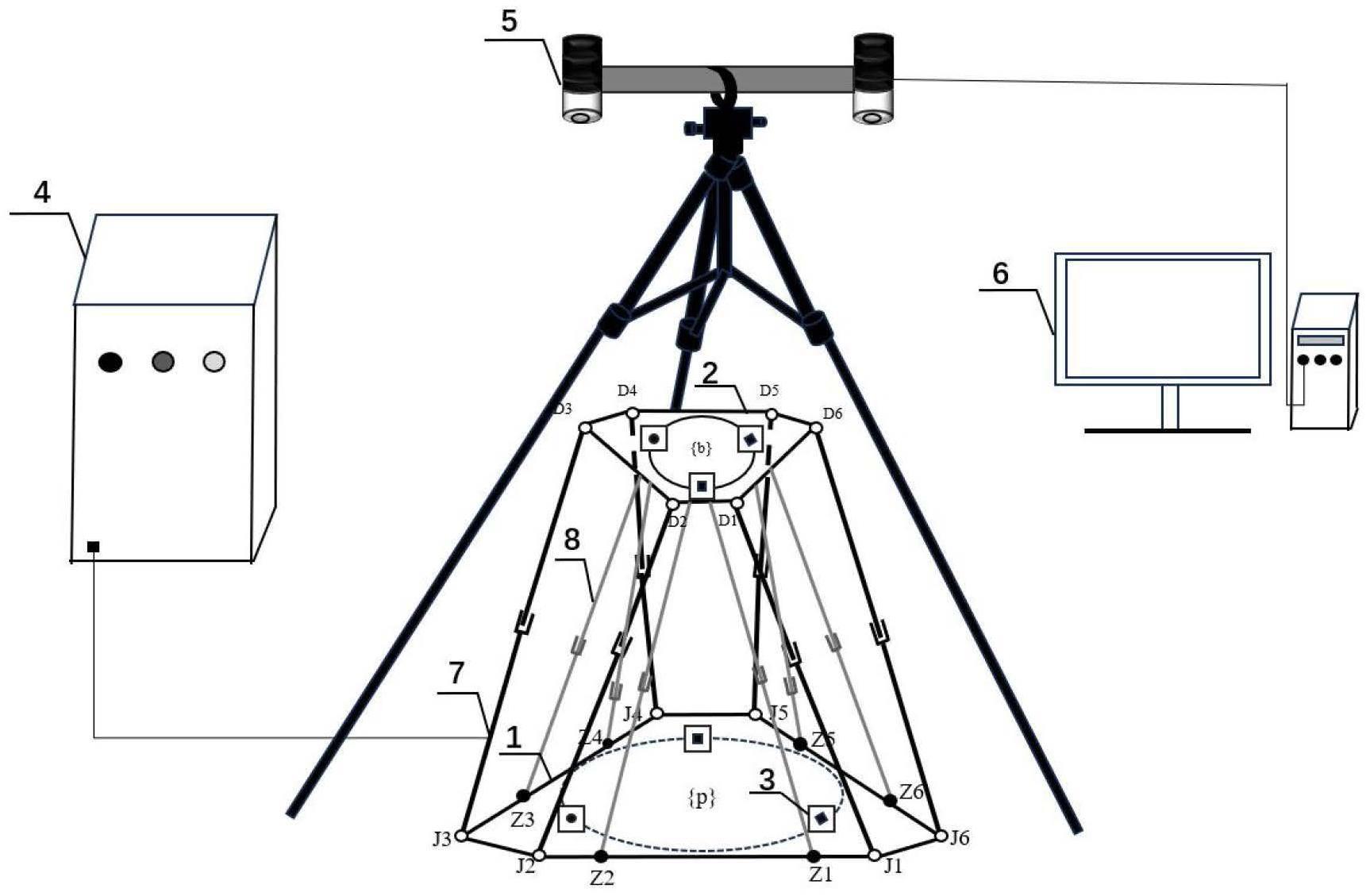
50、前述的一种并联机器人运动学模型在线学习方法中,在线学习中,需要使用到以下装置,该装置主要包括:stewart静平面、运动平面、靶标、控制器、摄像机、数据处理与显示单元、驱动腿、原位测量系统;
51、控制器控制驱动腿进行伸缩运动,从而实现运动平面相对于stewart静平面的空间运动轨迹;靶标紧固于运动平面上,通过摄像机测量定点运动下靶标的实际位姿,同时,通过控制器读取原位测量系统的伸缩腿长,并通过运动学正解出运动平台的实际位姿,通过视觉仪器验证原位测量系统的位姿测量精度;并用数据处理与显示单元处理及显示位姿数据并进行运动学参数的实时估计。
52、本发明的有益效果:与现有技术相比,针对传统六自由并联机器人校准方法不能实时校准且易受噪声干扰等不足,本发明提供并联机器人运动学模型在线学习方法,首先,将测量靶标均匀分布在以典型六自由度并联机器人stewart平台的运动台面和静止台面表面为圆心的圆周上,并将其固定,通过控制stewart平台的运动台面输出六自由度运动轨迹;其次,搭建原位测量系统,并用视觉测量仪器验证原位测量系统精度是否满足stewart平台运动台面的位姿实时测量;再者,基于并联机器人运动学原理,通过闭环矢量环法,构建运动学参数误差模型;最后,采用在线学习算法对stewart平台的运动学参数实时估计。这种方法实现了stewart平台在动态轨迹下运动台面位姿的实时测量,以及提高了运动学参数估计的精度。此外,该方法还具备了强大的抗干扰能力,使其能够在复杂环境下稳定运行。对于运动学参数的实时辨识,通过s2步骤使stewart运动平面进行空间轨迹运动;其次,在s3步骤中搭建原位测量系统,并通过视觉仪器验证原位测量系统的测量精度,验证通过后,将原位测量系统作为stewart平台位姿的获取途径,在s4步骤中基于并联机器人运动学原理,通过闭环矢量环法,构建运动学参数误差模型;s5步骤中在运用递推最小二乘法实现stewart平台的运动学参数实时估计。
53、本发明具有如下几个方面的优势:
54、(1)本发明搭建了一套原位测量系统,可实时测量stewart平台位姿;
55、(2)本发明方法基于原位测量系统与在线学习算法对stewart平台的运动学参数进行实时估计;
56、(3)在运动学参数的估计过程中,在线学习算法通过持续迭代改进其噪声协方差矩阵,从而在抵御噪声干扰方面展现出了显著的优势;
57、(4)在实际应用中,传统的递推最小二乘法经常遇到数据饱和的问题。为解决这一实际挑战,本发明引入了遗忘因子λ,增强了新数据对模型的影响力;
58、(5)本方法采用的原位测量系统,是通过读取测量支链的伸缩腿长并利用运动学正解来确定stewart运动台面的实际位姿,这种方式既保证了高精度,又具有低成本效益。
- 还没有人留言评论。精彩留言会获得点赞!