一种基于空间点云监控识别的巡防智能机器人的制作方法
本发明涉及巡检机器人,具体涉及一种基于空间点云监控识别的巡防智能机器人。
背景技术:
1、城市公共场所使用的安防措施通常为:监控摄像头、移动交巡警平台和人力安保人员,其中,固定监控摄像头存在死角,无法采集到死角区域的图像,另外,当监控目标距离摄像头比较远的时候成像不清晰,为保证公共场所的安防清晰、无死角,需要在公共场所各个区域设置足够多的摄像头或者设置巡逻机器人,大量摄像头的设置增大了公共场所安防的成本。
2、安防巡逻机器人通常按照固定的巡逻路线进行巡逻式监控,功能存在较多局限,机器人预先由控制人员设置巡防范围、巡防路线,巡防的路线依赖人工调整,如在巡逻中突发情况遇到障碍物时,无法及时灵活的调整对应的路线。
3、考虑到机器人巡防过程中遇到障碍物阻挡甚至碰撞的问题,现有技术cn109773783a提供的一种基于空间点云识别的巡防智能机器人及其警务系统,公开了一种向周围发射激光并接收物体反射激光生产空间点云最终确定障碍物坐标的方案,但是该方案需要障碍物靠近机器人才能够清晰的接收到对应的反射激光,在距离较远时容易出现误判的情况,当障碍物靠近再进行路线调整可能无法避免碰撞,造成机器人自身的路线调整不及时。
技术实现思路
1、为此,本发明提供一种基于空间点云监控识别的巡防智能机器人,有效的解决了现有技术中的空间点云监控的方式在距离较远时容易出现误判的情况、当障碍物靠近再进行路线调整可能无法避免碰撞造成机器人自身的路线调整不及时的问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:一种基于空间点云监控识别的巡防智能机器人,具备:
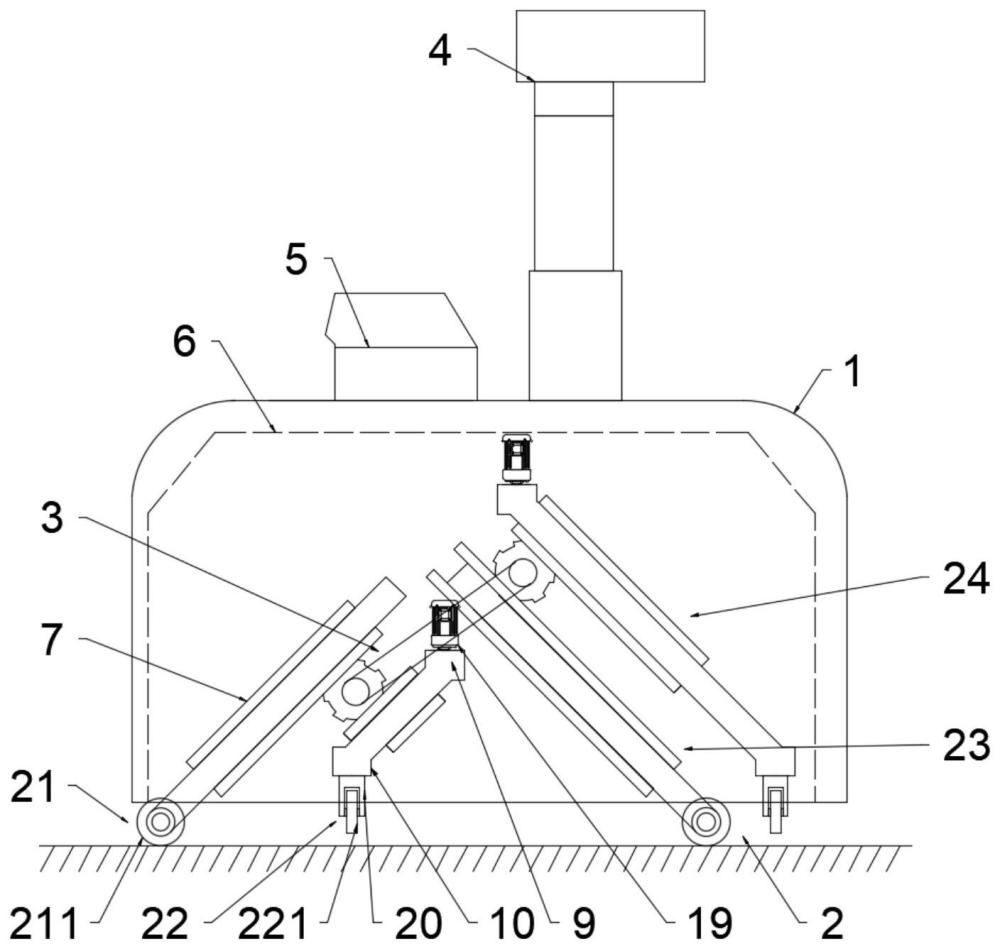
3、巡防机体,其上设置有图像采集元件和激光收发装置,所述巡防机体在空间范围内运动,所述激光收发装置向空间周围发射密集激光信号,并接收空间内物体反射的激光信号,生成空间点云,基于空间点云确定空间范围内物体的轮廓和坐标;
4、驱动轮组,设置在所述巡防机体的底部,所述驱动轮组具备定向轮组和转向轮组,所述定向轮组和所述转向轮组其中一个轮组与空间范围内水平面接触进行运动,所述定向轮组的运动方向不变,所述转向轮组的方向可调,所述定向轮组上安装有第一活动架,所述转向轮组上安装有第二活动架;
5、组合驱动结构,安装在所述巡防机体内,所述组合驱动结构与所述第一活动架、所述第二活动架对应驱动连接,所述组合驱动结构能够在通过所述第一活动架带动所述定向轮组上移或者下移的同时带动所述转向轮组往相反的方向活动;
6、其中,所述定向轮组和所述转向轮组的升降位移相同。
7、进一步地,
8、所述第一活动架包括第一前向架、第一后向架;
9、所述第一前向架和所述第一后向架相互垂直,且其底部一前一后设置,所述第一前向架和所述第一后向架的底部始终平齐。
10、进一步地,
11、所述第二活动架包括第二前向架、第二后向架;
12、所述第二前向架和所述第二后向架相互垂直,且其底部一前一后设置,所述第二前向架和所述第二后向架的底部始终平齐。
13、进一步地,
14、所述定向轮组包括安装在所述第一前向架和所述第一后向架底部的定向轮;
15、所述转向轮组包括安装在所述第二前向架、所述第二后向架底部的转向轮;
16、所述定向轮通过第一连接轴安装在所述第一前向架和所述第一后向架底部。
17、进一步地,
18、所述巡防机体内开设有驱动腔,所述驱动腔内壁固定安装有若干滑架,所述第一前向架、所述第一后向架、所述第二前向架、所述第二后向架均滑动在所述滑架内;
19、靠近所述第一前向架、所述第二前向架的所述滑架与靠近所述第一后向架、所述第二后向架的所述滑架相互垂直。
20、进一步地,
21、所述组合驱动结构包括设置在所述第一后向架和所述第二后向架之间的第一驱动齿轮、设置在所述第一前向架和所述第二前向架之间的第二驱动齿轮;
22、所述第一驱动齿轮和所述第二驱动齿轮之间通过传动链传动连接。
23、进一步地,
24、所述第一后向架底部安装有若干第一啮合齿,所述第二后向架顶部安装有若干第二啮合齿,所述第一啮合齿、所述第二啮合齿分别与所述第一驱动齿轮两侧啮合;
25、所述第一驱动齿轮上设置有第一驱动电机,所述第一驱动齿轮连接在所述第一驱动电机的输出端。
26、进一步地,
27、所述第一前向架顶部安装有若干第三啮合齿,所述第二前向架底部安装有若干第四啮合齿,所述第三啮合齿、所述第四啮合齿分别与所述第二驱动齿轮两侧啮合。
28、进一步地,所述第二前向架和所述第二后向架内均设置有联动腔,所述第二前向架、所述第二后向架上竖直设置有上连接筒舱,且其底部竖直设置有下连接筒舱;
29、所述上连接筒舱内转动设置有第一轴座,所述第一轴座上设置第一u形座,所述第一u形座通过第一十字轴安装有第二u形座,所述第二u形座上连接有旋转轴柱,所述旋转轴柱端部设置有第三u形座,所述第三u形座通过第二十字轴安装有第四u形座;
30、所述第三u形座活动安装在所述下连接筒舱内,所述旋转轴柱旋转设置在所述联动腔内。
31、进一步地,
32、所述第一轴座上端连接有第三驱动电机,所述第一轴座连接在所述第三驱动电机的输出端,所述第四u形座底部连接有第二轴座,所述转向轮通过第二连接轴安装在所述第二轴座的底部;
33、所述第一连接轴和所述第二连接轴上均连接有运行电机。
34、本发明与现有技术相比较具有如下有益效果:
35、本发明中,在巡防机体内底部设置驱动轮组,驱动轮组具备定向轮组和转向轮组,定向轮组和转向轮组其中一个轮组与空间范围内水平面接触进行运动,定向轮组的运动方向不变,转向轮组的方向可调,定向轮组适用于巡防机体进行直线式巡防,转向轮组适用于巡防机体进行曲线或者不规则轨迹巡防,另外,在遇到障碍物时,制动巡防机体并转换行进方向,以垂直于当前路径的方向远离当前路径,以在检测到障碍物时便于快速调整路线、躲避在运动中的障碍物。
技术特征:
1.一种基于空间点云监控识别的巡防智能机器人,其特征在于,具备:
2.根据权利要求1所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
3.根据权利要求2所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
4.根据权利要求3所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
5.根据权利要求4所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
6.根据权利要求5所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
7.根据权利要求6所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
8.根据权利要求7所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
9.根据权利要求8所述的基于空间点云监控识别的巡防智能机器人,其特征在于,所述第二前向架(241)和所述第二后向架(242)内均设置有联动腔(8),所述第二前向架(241)、所述第二后向架(242)上竖直设置有上连接筒舱(9),且其底部竖直设置有下连接筒舱(10);
10.根据权利要求9所述的基于空间点云监控识别的巡防智能机器人,其特征在于,
技术总结
本发明公开了一种基于空间点云监控识别的巡防智能机器人,具备巡防机体、驱动轮组、组合驱动结构,驱动轮组具备定向轮组和转向轮组,定向轮组和转向轮组其中一个轮组与空间范围内水平面接触进行运动,定向轮组上安装有第一活动架,转向轮组上安装有第二活动架,组合驱动结构能够在通过第一活动架带动定向轮组上移或者下移的同时带动转向轮组往相反的方向活动。本发明中,定向轮组的运动方向不变,转向轮组的方向可调,定向轮组适用于巡防机体进行直线式巡防,转向轮组适用于巡防机体进行曲线或者不规则轨迹巡防,在遇到障碍物时,制动巡防机体并转换行进方向,以垂直于当前路径的方向远离当前路径,以在检测到障碍物时躲避在运动中的障碍物。
技术研发人员:吴天林,伍家林,胡楠,吴群辉,刘中南,杨波
受保护的技术使用者:中交机电工程局有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!