一种人形机器人的上肢结构装置的制作方法
本发明涉及机械手臂,特别涉及一种人形机器人的上肢结构装置。
背景技术:
1、人形的工业机器人应用前景非常广阔,可以在生产线上执行各种复杂的任务,如装配,焊接,测量,检查等。而且,与人工比较,机器人可以更精确,更快速,更连贯地完成任务,在实际应用过程中发现存在下列问题:
2、1、人形机器人的机械臂上,安装有用于装配的螺丝刀、扳手、钻孔件,在需要根据生产线变化调整时,需要操作人员拆下原装的工具换上新的工具,工具切换较为复杂;
3、2、机械臂上的部件拆装较为复杂,检修较为麻烦;
4、3、每次更替机械臂上的工具时,操作人员需要携带工具箱至机器人处进行更替,不同尺寸的工具较多,且均为金属制造较为沉重,操作人员频繁更替负担较大。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种人形机器人的上肢结构装置,解决人形机器人的机械臂上,安装有用于装配的螺丝刀、扳手、钻孔件,在需要根据生产线变化调整时,需要操作人员拆下原装的工具换上新的工具,工具切换较为复杂,每次更替机械臂上的工具时,操作人员需要携带工具箱至机器人处进行更替,不同尺寸的工具较多,且均为金属制造较为沉重,操作人员频繁更替负担较大的技术问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
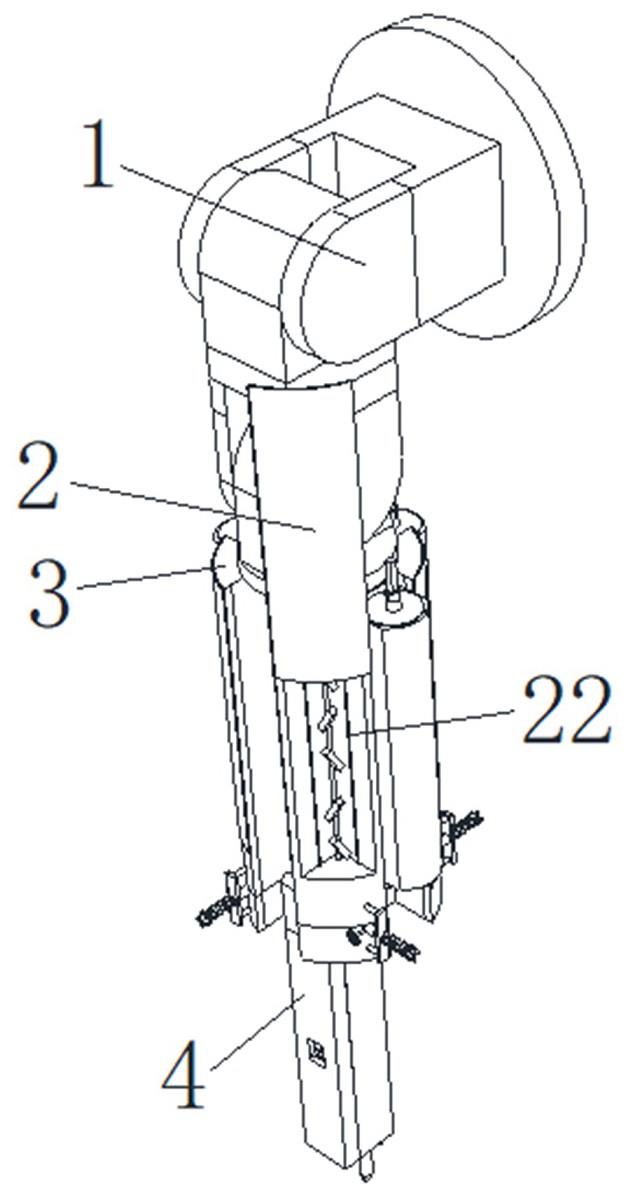
5、一种人形机器人的上肢结构装置,包括安装在人形机器人肩部的机械臂肩关节部件,该一种人形机器人的上肢结构装置还包括:连接机构和四个切换机构;
6、其中,连接机构包括连接座,连接座的中间部分贯穿有中间槽,连接座环形侧壁上开设有四个等距的安装槽,四个切换机构分别位于四个安装槽内,且四个切换机构以中间槽为轴心环形阵列;
7、其中,位于前端的切换机构包括转架和连接架;
8、连接座剩余的四块环形外壁上均开设有隐藏槽,每个隐藏槽内均设置有遮挡机构,四个隐藏槽以中间槽为轴心环形阵列;
9、连接座剩余的四块环形外壁上还开设有插槽和两个圆槽,每个插槽均直线贯穿至安装槽的槽壁上,圆槽不贯穿至安装槽槽壁,每个插槽内均设置有限位机构;
10、限位机构包括限位杆和拉杆;
11、每个插槽的槽口处均开设有圆形的卡槽。
12、优选的:所述中间槽内固定安装有电动伸缩转臂,所述电动伸缩转臂的转臂上固定连接有十字型的卡件,四个限位杆分别与四个插槽活动套接,每个限位杆上均贯穿有细槽,每个细槽内均活动套接有带转盘的细杆;
13、其中,细杆的端部卡接在卡槽内,每个细杆上均贯穿有孔,每个限位杆的端部均固定连接有矩形的滑杆,每个滑杆的端部均固定连接有圆形的挡片。
14、优选的:每个滑杆上均活动套接有弹簧一,挡片、滑杆和限位杆组成的结构的端部开设有螺纹槽一,螺纹槽一内螺纹套接有带十字帽的螺杆,螺杆上的十字帽与挡片抵住时,螺杆与细杆上的孔活动套接;
15、其中,拉杆的中间部分开设有矩形的通槽,通槽与滑杆活动套接,弹簧一位于拉杆和挡片之间,每个拉杆的两端均固定连接有朝向连接座的短杆,短杆与对应位置的圆槽活动套接,弹簧一处于被压缩状态。
16、优选的:所述转架的一端固定连接有旋转架,旋转架的端部开设有圆形的槽孔,槽孔与对应位置的限位杆活动套接,转架转动至竖直状态时,朝向连接架的面开设有螺纹槽二,背离连接架的面开设有矩形槽;
17、其中,螺纹槽二内螺纹套接有连接螺杆,连接架朝向转架的面固定连接有凸型的连接条,连接条中间部分开设有同样的螺纹槽二,连接螺杆端部与连接条上的螺纹槽二螺纹套接。
18、优选的:所述转架朝向连接架的面开设有凸性的连接槽,连接槽与连接条活动卡接,连接架的中间部分开设有圆形的竖槽,连接架的上表面固定连接有抵触架,抵触架上端与连接座底部抵住时,连接架处于竖直状态;
19、其中,竖槽内设置有转动机构,转动机构包括转杆。
20、优选的:所述转杆的中间部分开设有环形槽,转杆的上端开设有十字槽,十字槽的上槽口处开设有四个弧面槽,转杆的底部固定连接有圆片,圆片直径大于转杆直径;
21、其中,环形槽上活动套接有两个圆环。
22、优选的:两个圆环之间固定连接有弹簧二,位于下端的圆环固定套接在竖槽内,位于上端的圆环活动套接在竖槽内,圆片活动抵在连接架底面,圆片的底面固定连接有连接柱,连接柱上开设有矩形的横槽和圆形的套槽,连接柱的端部固定连接有矩形的套柱;
23、其中,横槽内活动套接有横杆,横杆上活动套接有弹簧三,横杆的两端分别固定连接有挡块和连接片,连接片上还固定连接有横向的圆柱,圆柱活动套接在套槽内,套柱上活动套接有套件,套件上开设有同样的套槽,套件上的套槽与圆柱活动套接,弹簧三位于挡块和连接柱之间。
24、优选的:所述遮挡机构包括固定杆、主杆、两个辅助杆和一个弧形的挡板,主杆、辅助杆均竖直固定安装在对应的隐藏槽内,每个主杆上均活动套接有弹簧四。
25、优选的:所述挡板的内弧面下端固定连接有l型架,l型架的转角处开设有转角槽,l型架上还开设有两个竖孔;
26、其中,竖孔与辅助杆活动套接,转角槽与主杆活动套接,弹簧四位于l型架和隐藏槽槽顶之间。
27、优选的:每个固定杆上固定安装有等距的倾斜的矩形柱,矩形柱与套柱形状相同,挡板活动贴合在连接座的环形侧壁上。
28、(三)有益效果
29、1、人形机器人的一只手臂安装本装置,另一只手安装机械手,工作过程中,四个套件上分别固定安装有不同的工具,分别是平头螺丝刀、十字螺丝刀、扳手、钻孔工具,根据不同的使用场景,人形机器人通过预设的程序控制机械手拉动拉杆,使得短杆脱离圆槽,再转动拉杆可以带动转架转动,使得需要使用到的工具转出安装槽,转动一百八十度后,转出转架达到竖直状态,此时复位拉杆使得短杆重插入圆槽内,达到固定转架和连接架位置的效果,四个转架调节方便,切换快速,机器人完全可以通过预设的动作完成自行切换,提高人形机器人的工作效率,降低需要人参与的程度。
30、2、选择并固定好需要使用的转架后,中间槽内的电动伸缩转臂推动卡件卡入十字槽内,十字槽上的弧面槽起到辅助卡件的效果,避免卡件抵在十字槽的槽口处,使得转杆受到卡件的挤压后可以偏转一定角度后,对齐十字槽和卡件,卡件卡入十字槽后,通过电动伸缩转臂带动卡件转动,即可带动转杆转动,从而带动套件上的工具转动,达到拆装螺丝、螺帽和打孔的效果,切换后的转架与驱动装置的接通方便快速。
31、3、当操作人员需要拆卸转架进行检修更替时,通过转动螺杆使其脱离螺纹槽一,此时细杆失去螺杆的限制可以抽出卡槽和细槽,此时可以抽出限位杆使其与槽孔脱离,达到解除对旋转架限制的效果,使得转架和连接件可以脱离连接座,便于进行检修更替,无需拆动机械臂肩关节部件,拆装复位的速度快,操作步骤简单,易教学。
32、4、通过转动连接螺杆,使得连接条可以沿着连接槽滑动脱离转架,便于拆分转架和连接架。
33、5、通过伸缩电动伸缩转臂长度,十字槽与卡件卡合后,继续伸长电动伸缩转臂可以挤压转杆,压缩弹簧二,使得转杆下降高度,从可以在面对不同深度的使用场景时,可以通过调节转杆高度,在不调节连接座位置的情况下完成,提高适用性,尤其在遇到较狭隘的空间,连接座无法探入时,通过改变转杆位置来使套件上的工具到达工作位置,可以显著提高适用性,且完成工作后转杆可以自动复位。
34、6、通过拉动挡板上滑,打开隐藏槽,可以选择矩形柱上套装的不同规格的平头螺丝刀、十字螺丝刀、扳手、钻孔工具,进一步提升适用性,利用隐藏槽达到工具箱的作用,保存大量不同规格的工具,提高更替效率,操作人员更替工具时无需携带工具箱,在弹簧四的弹力下,工作时挡板不易偏移,可以保持隐藏槽的隐蔽性,利用挡板挡住矩形柱上的工具,不易掉落。
- 还没有人留言评论。精彩留言会获得点赞!