一种工业机器人的机械臂结构
本发明涉及智能工业制造,具体一种工业机器人的机械臂结构。
背景技术:
1、工业机器人是近代自动控制领域中出现的一项新技术,是目前现代机械制造中的一个重要组成部分。工业机器人的诞生显著地提高了劳动生产率,改善了现代制造业的现状,改善了劳动条件和生产速率的同时也加快实现了工业生产机械化和自动化的步伐。尤其在高温高压、粉尘、噪音以及带有放射性和污染的场合中,工业机器人应用的更为广泛。因而受到各先进国家的重视,投入大量人力物力加以研究和应用。
2、其中,工业机器人的机械臂结构是机器人学的一个分支,它代表了机电一体化的最高成就。工业机器人的机械臂结构一般应用在工厂车间环境中,配合自动化生产的需要,代替工人来完成材料或零件的搬运加工、装配等操作。目前国际上工业机器人的机械臂结构的定义是“机器臂结构是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴承,能借助于可编程序操作来处理各种材料、零件、工具和专用设备,以代替工人的工作”。它综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种科学的最新研究成果是机电一体化技术的典型代表。随着科学技术的不断发展,人们对工业机器人机器臂的工作能力提出了更高的要求,不仅要求工业机器人机器臂的外形美观、操作简单,而且要具有一定的稳定性、灵活性和开放性。
3、在现有的技术中,工业机器人的机械臂广泛应用与车间以及工厂的零件搬运以及加工,工业机器人的机械臂在对零件的夹持以及搬运决定了生产的效率,当在机械臂在对表面光滑的零件进行夹持搬运时,当零件本身的重量较重,夹取移动的时候容易出现零件的位置偏移或者掉落的情况,影响生产速率,所以,在此提出了一种工业机器人的机械臂结构,具有在夹持零件的过程中,通过机械臂夹取零件时夹取的动力,触发阻隔板,有效的防止零件掉落或者产生位移,可以提升机械臂的安全性与稳定性。
技术实现思路
1、针对现有技术中机械臂夹取表面光滑以及重量较重的零件容易掉落以及移动过程中产生偏移的不足,本发明提供了一种工业机器人的机械臂结构,具备提高机械臂稳定性和安全性的优点。
2、为实现上述目的,本发明提供如下技术方案:一种工业机器人的机械臂结构,包括转动底座、第一调节臂和第二调节臂,所述第一调节臂活动连接在转动底座的外部,所述第二调节臂与第一调节臂活动连接,所述第二调节臂的外部拆卸安装有调节安装头,所述调节安装头的外部设置有转动座,所述转动座的外部设置有伸缩底座,所述伸缩底座的外部固定安装有机壳,所述机壳的内部设置有夹持机构,所述夹持机构包括第一连接板、第二连接板、活动轴、夹手和传动齿轮,所述伸缩底座的外部设置有伸缩环,所述伸缩环的外部设置有伸缩齿杆,所述夹手的内部设置有自动限位机构,所述自动限位机构包括受力板、第一传动齿轮、第一传动轴、第二传动齿轮、第二传动轴、弹簧、传动齿板、齿槽和限位板,所述夹手的外部开设有收纳孔,通过设置了夹持机构和自动限位机构,夹持的零件会向两边施加反向的力,通过夹持时产生的力触发自动限位机构,带出夹手中的阻隔板,有效的防止零件掉落或者产生位移,提升了机械臂的安全性与稳定性。
3、优选的,所述活动轴活动连接在机壳的外部,所述第一连接板固定连接在活动轴的外部,所述第二连接板固定连接在活动轴的外部,所述传动齿轮固定连接在活动轴的外部。
4、优选的,所述第一连接板远离活动轴的一端固定连接在夹手的外部,所述第二连接板远离活动轴的一端固定连接在夹手的外部。
5、优选的,所述伸缩底座远离转动座的一端与机壳的外部固定连接,所述伸缩齿杆与传动齿轮相啮合。
6、优选的,所述弹簧固定连接在夹手的内部,所述受力板固定连接在弹簧远离夹手内部的一端,所述限位板固定安装在夹手的外部。
7、优选的,所述第一传动轴活动连接在夹手的外部,所述第二传动轴活动连接在夹手的外部,所述第一传动齿轮固定连接在第一传动轴的外部,所述第二传动齿轮固定连接在第二传动轴的外部,所述第一传动齿轮和第二传动齿轮的外部同时设置有传动带。
8、优选的,所述传动齿板固定连接在受力板的外部,所述传动齿板与第一传动齿轮相啮合。
9、优选的,所述收纳孔开设在夹手的外部,所述滑动槽开设在夹手的外部,所述所述齿槽开设在阻隔板的外部,所述齿槽与第二传动齿轮相互啮合,所述阻隔板滑动连接在滑动槽的内部。
10、有益效果:
11、1、该工业机器人的机械臂结构,为避免在机械臂夹取表面光滑且较重的零件移动的时候容易出现零件的位置偏移或者掉落的情况,在装置中设置了夹持机构和自动限位机构,夹持的零件会向两边施加反向的力,通过夹持时产生的力触发自动限位机构,带出夹手中的阻隔板,有效的防止零件掉落或者产生位移,提升了机械臂的安全性与稳定性。
技术特征:
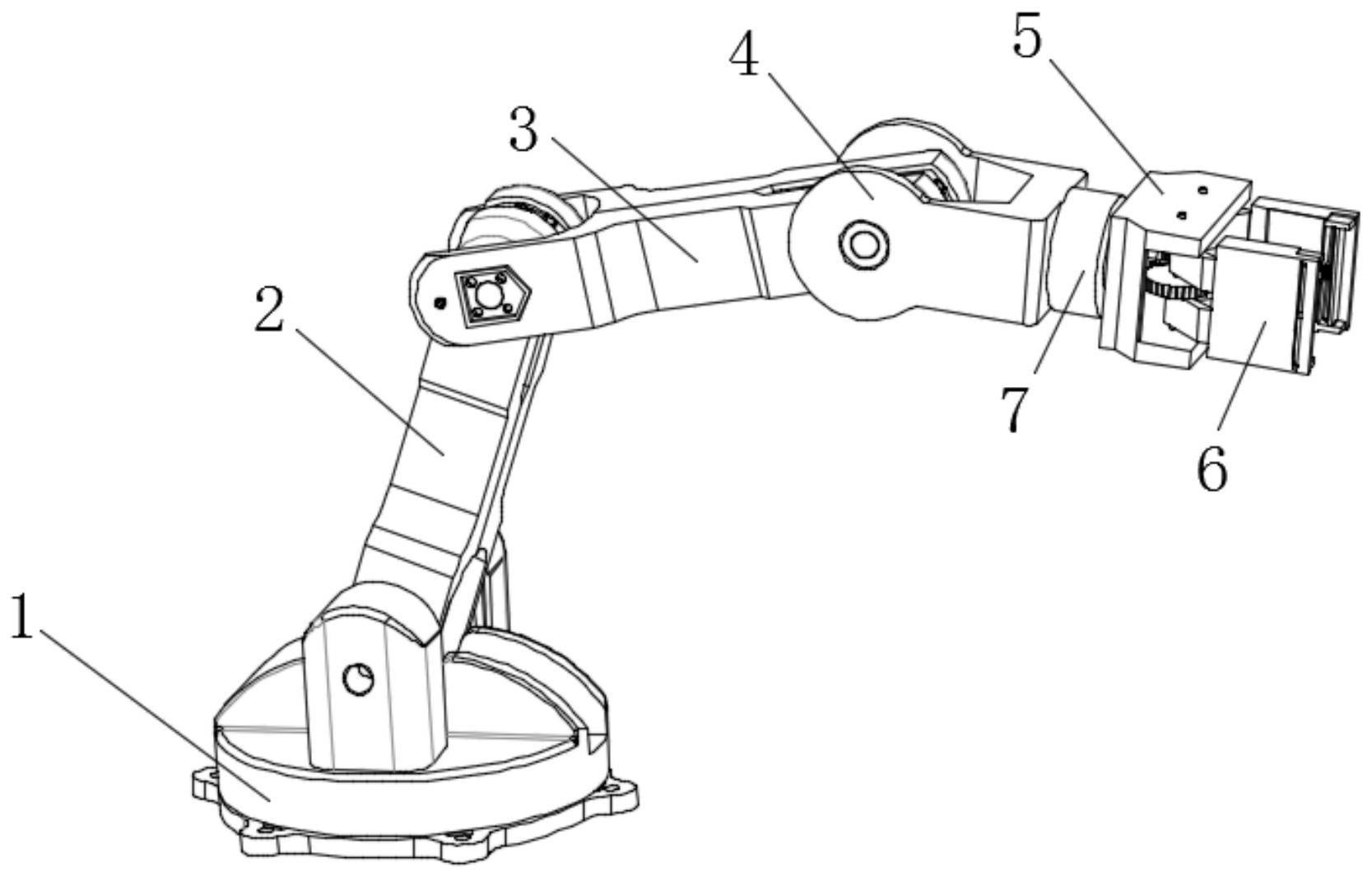
1.一种工业机器人的机械臂结构,包括转动底座(1)、第一调节臂(2)和第二调节臂(3),其特征在于:所述第一调节臂(2)活动连接在转动底座(1)的外部,所述第二调节臂(3)与第一调节臂(2)活动连接,所述第二调节臂(3)的外部拆卸安装有调节安装头(4),所述调节安装头(4)的外部设置有转动座(7),所述转动座(7)的外部设置有伸缩底座(14),所述伸缩底座(14)的外部固定安装有机壳(5),所述机壳(5)的内部设置有夹持机构,所述夹持机构包括第一连接板(9)、第二连接板(16)、活动轴(12)、夹手(6)和传动齿轮(8),所述伸缩底座(14)的外部设置有伸缩环(13),所述伸缩环(13)的外部设置有伸缩齿杆(15),所述夹手(6)的内部设置有自动限位机构,所述自动限位机构包括受力板(11)、第一传动齿轮(20)、第一传动轴(21)、第二传动齿轮(23)、第二传动轴(22)、弹簧(17)、传动齿板(19)、齿槽(25)和限位板(26),所述夹手(6)的外部开设有收纳孔(24)。
2.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述活动轴(12)活动连接在机壳(5)的外部,所述第一连接板(9)固定连接在活动轴(12)的外部,所述第二连接板(16)固定连接在活动轴(12)的外部,所述传动齿轮(8)固定连接在活动轴(12)的外部。
3.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述第一连接板(9)远离活动轴(12)的一端固定连接在夹手(6)的外部,所述第二连接板(16)远离活动轴(12)的一端固定连接在夹手(6)的外部。
4.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述伸缩底座(14)远离转动座(7)的一端与机壳(5)的外部固定连接,所述伸缩齿杆(15)与传动齿轮(8)相啮合。
5.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述弹簧(17)固定连接在夹手(6)的内部,所述受力板(11)固定连接在弹簧(17)远离夹手(6)内部的一端,所述限位板(26)固定安装在夹手(6)的外部。
6.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述第一传动轴(21)活动连接在夹手(6)的外部,所述第二传动轴(22)活动连接在夹手(6)的外部,所述第一传动齿轮(20)固定连接在第一传动轴(21)的外部,所述第二传动齿轮(23)固定连接在第二传动轴(22)的外部,所述第一传动齿轮(20)和第二传动齿轮(23)的外部同时设置有传动带(18)。
7.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述传动齿板(19)固定连接在受力板(11)的外部,所述传动齿板(19)与第一传动齿轮(20)相啮合。
8.根据权利要求1所述的一种工业机器人的机械臂结构,其特征在于:所述收纳孔(24)开设在夹手(6)的外部,所述滑动槽(10)开设在夹手(6)的外部,所述齿槽(25)开设在阻隔板(27)的外部,所述齿槽(25)与第二传动齿轮(23)相互啮合,所述阻隔板(27)滑动连接在滑动槽(10)的内部。
技术总结
本发明涉及智能工业制造技术领域,且公开了一种工业机器人的机械臂结构,包括转动底座、第一调节臂和第二调节臂,调节安装头的外部设置有转动座,转动座的外部设置有伸缩底座,伸缩底座的外部固定安装有机壳,机壳的内部设置有夹持机构,夹持机构包括第一连接板、第二连接板、活动轴、夹手和传动齿轮,伸缩底座的外部设置有伸缩环,伸缩环的外部设置有伸缩齿杆,夹手的内部设置有自动限位机构,自动限位机构包括受力板、第一传动齿轮、第一传动轴、第二传动齿轮、第二传动轴、弹簧、传动齿板、齿槽和限位板,通过夹持时产生的力触发自动限位机构,带出夹手中的阻隔板,有效的防止零件掉落或者产生位移,提升了机械臂的安全性与稳定性。
技术研发人员:徐青青,宋安然,赵海芳,陈莹,刘洁
受保护的技术使用者:宿迁学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!