一种矿山智能安全定位巡检机器人装置及系统
本发明涉及矿山安全设备,具体为一种矿山智能安全定位巡检机器人装置及系统。
背景技术:
1、矿山指有一定开采境界的采掘矿石的独立生产经营单位。矿山主要包括一个或多个采矿车间(或称坑口、矿井、露天采场等)和一些辅助车间,大部分矿山还包括选矿场(洗煤厂)。矿山包括煤矿、金属矿、非金属矿、建材矿和化学矿等等。矿山规模通常用年产量或日产量表示。年产量即矿山每年生产的矿石数量。按产量的大小,分为大型、中型、小型3种类型。矿山规模的大小,要与矿山经济合理的服务年限相适应,只有这样,才能节省基建费用,降低成本。在矿山生产过程中,采掘作业既是消耗人力、物力最多,占用资金最多,又是降低采矿成本潜力最大的生产环节。降低采掘成本的主要途径是提高劳动生产率及产品质量,降低物资消耗。
2、在专利申请号为cn201910966207.7的中国专利中,其提出一种矿山智能安全定位巡检机器人装置及系统,包括:移动平台、以及安装在所述移动平台上的:分别连接控制器的供电装置、图像采集装置、自动撬锚装置和导航定位装置;所述图像采集装置用于岩石裂缝的图像采集,所述岩石裂缝的图像用于采用人脸识别算法进行岩石裂缝的动态判断;所述自动撬锚装置包括冲击钻和切割锯;所述控制器通过无线通信连接上位机。提供了自动巡检、危险源(矿山岩石裂缝)自动监控、危险源处置等功能。尤其创造性地将人脸识别的方案引入到对矿山岩石裂缝这一主要危险源的长期动态监控和识别当中,使图像采集装置能够复用于常规图像采集和危险源监控,降低了成本,且效果优于现有的方案。但是矿山道路多为倾角斜坡,装置在移动时,其内部的无人机等工具会与装置内壁发生碰撞,导致损坏,且对危险源进行清除时,掉下的碎石等可能会砸坏装置,造成浪费,此外,其需要充电,导致巡检效率低下。
技术实现思路
1、针对现有技术中矿山道路多为倾角斜坡,装置在移动时,其内部的无人机等工具会与装置内壁发生碰撞,导致损坏,且对危险源进行清除时,掉下的碎石等可能会砸坏装置,造成浪费,此外,其需要充电,导致巡检效率低下不足,本发明提供了一种矿山智能安全定位巡检机器人装置及系统,具备保持该装置智能安全定位巡检的稳定性,对危险源裂缝处进行长宽及深度的全连探测,一边后续的处理,以及通过更换蓄电池的方式提高了该装置的工作时间,加强了定位巡检效果的优点。
2、为实现上述目的,本发明提供如下技术方案:
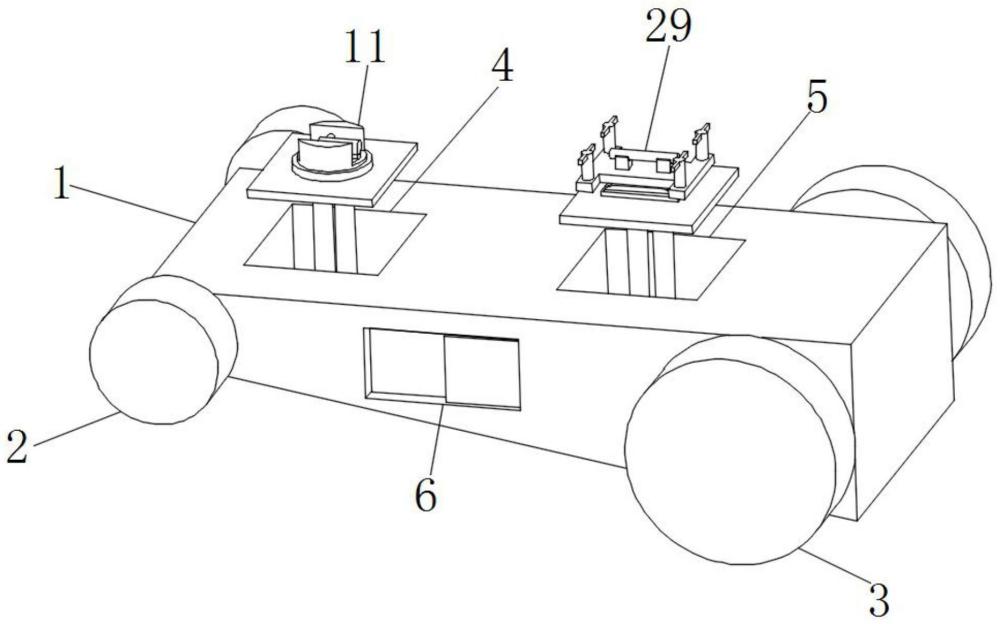
3、一种矿山智能安全定位巡检机器人装置,包括车体,所述车体前端通过转轴转动连接有前轮,所述车体后端通过转轴转动连接有后轮,所述车体正上方开设有第一凹槽和第二凹槽,所述第一凹槽内部安装有高清摄像装置,所述高清摄像装置用来对矿山进行定位巡检,所述第二凹槽内部放置有无人机,所述无人机用来对矿山危险源进行进一步识别及判断,所述车体内部可拆卸安装有蓄电池,所述蓄电池用来为整个车体及各部件之间的工作提供动能。
4、优选的,所述前轮直径大于后轮,矿山的路为倾角路面,通过增大前轮直径,保证车体在行驶过程中一直与水平面保持水平,减少内部无人机及蓄电池与车体内壁的碰撞,保持该装置智能安全定位巡检的稳定性。
5、优选的,所述第一凹槽侧面开设有第一滑槽,所述第一滑槽内部滑动连接有第一伸缩门,所述第一凹槽内部固定连接有第一电动伸缩杆,所述第一电动伸缩杆固定连接第一安装台,所述第一安装台上安装有高清摄像装置,在进行工作时,通过操控仪器控制第一伸缩门向第一滑槽内部滑动,第一凹槽打开,第一电动伸缩杆伸展,将内部的高清摄像装置伸出车体外,进行工作,未工作时,复位,对高清摄像装置进行有效的保护。
6、优选的,所述高清摄像装置包括安装底座、水平旋转支架和高清摄像头,所述安装底座安装在第一安装台上,所述水平旋转支架与第一安装台之间转动连接,所述水平旋转支架中间转动连接有转轴一,所述转轴一固定连接高清摄像头,通过高清摄像头对周围的环境进行巡检,水平旋转支架保证高清摄像头在水平方向的旋转,转轴一保证高清摄像头在垂直方向的旋转,保证巡检有效的进行,当探查到裂缝等危险源时,对其进行定位,然后拍照并上传,专家通过照片来判断裂缝的长度和宽度。
7、优选的,所述第二凹槽侧面开设有第二滑槽,所述第二滑槽内部滑动连接有第二伸缩门,所述第二滑槽内部固定连接有第二电动伸缩杆,所述第二电动伸缩杆固定连接第二安装台,所述第二安装台放置有无人机,未工作时,无人机在第二凹槽内部,车体对其进行有效的保护,当高清摄像装置拍摄到裂缝等危险源,需要无人机对其进行进一步的检查时,操控仪器控制第二伸缩门向第二滑槽内部滑动,第二凹槽打开,第二电动伸缩杆伸展,然后无人机启动,飞往定位点,然后开始工作。
8、优选的,所述无人机包括机体、螺旋桨和红外探测仪,所述机体下方固定连接第一底座,所述第一底座左右两端固定连接弹性连接体,所述弹性连接体固定连接第二底座,所述机体上方四周固定连接螺旋桨,所述机体上方中间区域固定连接安装架,所述安装架上可拆卸安装有红外探测仪,工作时,无人机飞到需要检查的裂缝处,通过其携带的红外探测仪对裂缝的深度进行探查,并将数据进行上传,专家对此进行研究从而确定下一步的行动。
9、优选的,所述车体侧面开设有第三凹槽,所述第三凹槽内可拆卸安装有蓄电池,所述第三凹槽侧面滑动连接有第三伸缩门,该装置快没电时,将返回充电桩处,然后打开第三伸缩门,通过更换蓄电池的方式提高了该装置的工作时间,加强了定位巡检的效果。
10、以及根据以上矿山智能安全定位巡检机器人装置的系统,包括至少两台车体,充电桩及若干可更换蓄电池和操控仪器,通过操控仪器对该装置进行操作,智能化的同时避免了人为实地巡查所带来的安全隐患,装置电量低时返回,更换蓄电池即可继续进行定位巡检。
11、有益效果:
12、1、该矿山智能安全定位巡检机器人装置,通过增大前轮直径,保证车体在行驶过程中一直与水平面保持水平,减少内部无人机及电池与车体内壁的碰撞,保持该装置智能安全定位巡检的稳定性。
13、2、该矿山智能安全定位巡检机器人装置,通过操控仪器控制第一伸缩门向第一滑槽内部滑动,第一凹槽打开,第一电动伸缩杆伸展,将内部的高清摄像装置伸出车体外,进行工作,未工作时,复位,对高清摄像装置进行有效的保护,通过高清摄像头对周围的环境进行巡检,水平旋转支架保证高清摄像头在水平方向的旋转,转轴一保证高清摄像头在垂直方向的旋转,保证巡检有效的进行,当探查到裂缝等危险源时,对其进行定位,然后拍照并上传,专家通过照片来判断裂缝的长度和宽度。
14、3、该矿山智能安全定位巡检机器人装置,通过未工作时,无人机在第二凹槽内部,车体对其进行有效的保护,当高清摄像装置拍摄到裂缝等危险源,需要无人机对其进行进一步的检查时,操控仪器控制第二伸缩门向第二滑槽内部滑动,第二凹槽打开,第二电动伸缩杆伸展,然后无人机启动,飞往定位点,然后开始工作,工作时,无人机飞到需要检查的裂缝处,通过其携带的红外探测仪对裂缝的深度进行探查,并将数据进行上传,专家对此进行研究从而确定下一步的行动。
15、4、该矿山智能安全定位巡检机器人装置,通过该装置快没电时,将返回充电桩处,然后打开第三伸缩门,通过更换蓄电池的方式提高了该装置的工作时间,加强了定位巡检的效果。
- 还没有人留言评论。精彩留言会获得点赞!