一种机器人开/关灯控制方法、装置及电子设备与流程
本发明涉及机器人,尤其涉及一种机器人开/关灯控制方法、装置及电子设备。
背景技术:
1、随着科技的日新月异,服务机器人已逐渐成为家居自动化的新兴趋势,它们能够自主完成各种家务任务,进一步提升我们的居家生活品质。然而,尽管传统机器人在空间导航方面表现出色,但在执行精细操作,如自主开/关灯时,却暴露出技术上的不足之处。
2、自主开/关灯似乎是一项简单的任务,但实际上却涉及一系列复杂的技术运用,包括精确的空间导航、物体识别以及精细的动作控制等。由于技术限制,传统机器人往往难以准确识别和定位灯具开关,也无法精确控制开关的操作。
3、因此,提出一种机器人开/关灯控制方法、装置及电子设备。
技术实现思路
1、本说明书提供一种机器人开/关灯控制方法、装置及电子设备,可以准确识别和定位灯具开关,精确控制开关的操作。
2、本说明书提供一种机器人开/关灯控制方法,包括:
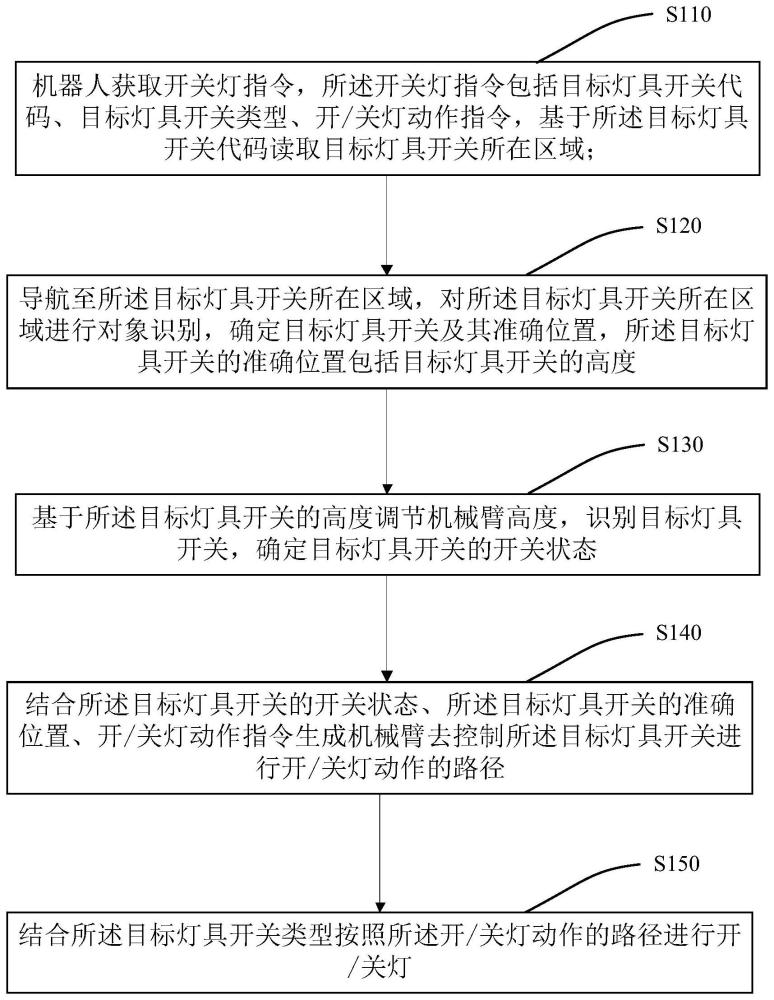
3、机器人获取开/关灯指令,所述开/关灯指令包括目标灯具开关代码、目标灯具开关类型、开/关灯动作指令,基于所述目标灯具开关代码读取目标灯具开关所在区域;
4、导航至所述目标灯具开关所在区域,对所述目标灯具开关所在区域进行对象识别,确定目标灯具开关及其准确位置,所述目标灯具开关的准确位置包括目标灯具开关的高度;
5、基于所述目标灯具开关的高度调节机械臂高度,识别目标灯具开关,确定目标灯具开关的开关状态;
6、结合所述目标灯具开关的开关状态、所述目标灯具开关的准确位置、开/关灯动作指令生成机械臂去控制所述目标灯具开关进行开/关灯动作的路径;
7、结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯。
8、可选的,所述对所述目标灯具开关所在区域进行对象识别,包括:
9、利用深度摄像头识别灯具开关上的标签。
10、可选的,所述识别目标灯具开关,确定目标灯具开关的开关状态,包括:
11、利用深度摄像头识别所述目标灯具开关的标签在相机坐标系下的yaw旋转角;
12、基于所述yaw旋转角确定所述目标灯具开关的开关状态。
13、可选的,所述结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯,包括:
14、基于所述目标灯具开关类型确定开/关灯动作的按压力度;
15、当机械臂上的力传感器感知到机械臂与所述目标灯具开关接触时,按照所述按压力度按压所述目标开关实现开/关灯。
16、可选的,还包括:
17、所述开/关灯指令还包括开/关灯定时指令;
18、按照开/关灯定时指令导航至所述目标灯具开关所在区域,直至结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯。
19、可选的,所述结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯之后,包括:
20、返回至所述目标灯具开关所在区域,识别所述目标灯具开关,确定目标灯具开关的开关状态。
21、可选的,所述返回至所述目标灯具开关所在区域,识别所述目标灯具开关,确定目标灯具开关的开关状态之后,包括:
22、当目标灯具开关的开关状态与所述开/关灯动作指令一致时,机械臂收缩回初始位置。
23、本说明书提供一种机器人开/关灯控制装置,包括:
24、获取模块,用于机器人获取开/关灯指令,所述开/关灯指令包括目标灯具开关代码、目标灯具开关类型、开/关灯动作指令,基于所述目标灯具开关代码读取目标灯具开关所在区域;
25、识别模块,用于导航至所述目标灯具开关所在区域,对所述目标灯具开关所在区域进行对象识别,确定目标灯具开关及其准确位置,所述目标灯具开关的准确位置包括目标灯具开关的高度;
26、确定模块,用于基于所述目标灯具开关的高度调节机械臂高度,识别目标灯具开关,确定目标灯具开关的开关状态;
27、生成模块,用于结合所述目标灯具开关的开关状态、所述目标灯具开关的准确位置、开/关灯动作指令生成机械臂去控制所述目标灯具开关进行开/关灯动作的路径;
28、控制模块,用于结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯。
29、可选的,所述对所述目标灯具开关所在区域进行对象识别,包括:
30、利用深度摄像头识别灯具开关上的标签。
31、可选的,所述识别目标灯具开关,确定目标灯具开关的开关状态,包括:
32、利用深度摄像头识别所述目标灯具开关的标签在相机坐标系下的yaw旋转角;
33、基于所述yaw旋转角确定所述目标灯具开关的开关状态。
34、可选的,所述结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯,包括:
35、基于所述目标灯具开关类型确定开/关灯动作的按压力度;
36、当机械臂上的力传感器感知到机械臂与所述目标灯具开关接触时,按照所述按压力度按压所述目标开关实现开/关灯。
37、可选的,还包括:
38、所述开/关灯指令还包括开/关灯定时指令;
39、按照开/关灯定时指令导航至所述目标灯具开关所在区域,直至结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯。
40、可选的,所述结合所述目标灯具开关类型按照所述开/关灯动作的路径进行开/关灯之后,包括:
41、返回至所述目标灯具开关所在区域,识别所述目标灯具开关,确定目标灯具开关的开关状态。
42、可选的,所述返回至所述目标灯具开关所在区域,识别所述目标灯具开关,确定目标灯具开关的开关状态之后,包括:
43、当目标灯具开关的开关状态与所述开/关灯动作指令一致时,机械臂收缩回初始位置。
44、本说明书还提供一种电子设备,其中,该电子设备包括:
45、处理器;以及,存储处理器可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行上述任一项所述的方法。
46、本说明书还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现上述任一项方法。
47、在本发明中,至少具备以下一种优点:
48、1、机器人在接收到开/关灯指令后,运动到与目标灯具开关有设定距离的位置即停止,避免机器人与目标灯具开关太远,机器人无法触及目标灯具,机器人与目标灯具太近,机器人无法识别目标灯具的问题;
49、2、机器人自动追踪灯具开关上的标签直至机器人到达目标灯具开关所在区域,机器人便会自动停止,从而确保了机器人能够准确、高效地对齐并靠近目标位置;
50、3、根据不同类型的灯具开关调整按压力度,提高操作的成功率,并减少可能对开关造成的损坏;同时,通过使用力传感器,可以实时监测和调整机械臂与目标灯具开关的接触力度,使操作更加准确和可靠;
51、4、通过结合定时指令,机器人不仅能够在指定的时间准确到达目标区域,还能确保在正确的时间点进行开/关灯动作,为用户提供更为便捷与智能化的服务;
52、5、反馈机制可以确保机器人在执行开/关灯动作后,能够核实开关的实际状态,提高操作的准确性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!