一种建筑低碳运行管理机器人及其控制方法与流程
本发明涉及节能监测,尤其涉及一种建筑低碳运行管理机器人及其控制方法。
背景技术:
1、随着城市化进程加快,城市中公共建筑也逐渐增加,公共建筑使用的能耗也逐渐增加,现有公共建筑的能耗增长的问题也日益凸显。
2、现有公共建筑管理单位等通常采用以下方法降低公共建筑内能耗设备的能耗:
3、一是存在一些建筑年龄较大的公共建筑物,由于建筑内能耗设备安装使用时限较久,且无法整体更换节能方案,一般通过在固定时间安排人员进行巡检,关闭或者调节人员较少区域的能耗设备,例如:空调、新风、照明等。这类方案需要通过人员定时定点巡逻检查,效率低下,且容易出错。
4、二是通过在能耗设备附近加装传感器,实现联网平台中心控制能耗设备开启和关闭,但是由于传感器安装位置大都是固定位置或者是一些能耗设备附近的位置,这些固定的安装位置对于检测存在误差进而造成调节误差,这类方案经常对周围环境误判造成能耗设备误调节或者关闭。
5、三是公共区域安装多个传感器以及摄像头以确保全部环境监测,在通过联网平台中心控制能耗设备开启和关闭,但是这类方案由于传感器和摄像头监测需要耗费大量电能,同时仅仅单一判断公共建筑物内环境情况,没有结合公共建筑外部的自然条件,往往节能效果较差,甚至能耗损耗更高。
6、针对上述的现有技术存在的至少一个问题设计一种基于智能机器人的节能监测系统及其方法是本发明研究的目的。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种建筑低碳运行管理机器人及其控制方法,能够解决上述的问题。
2、本发明提供一种建筑低碳运行管理机器人的控制方法,所述方法基于一种建筑低碳运行管理机器人,所述机器人包括:设置于所述机器人下部的第一控制模块、定位模块、运动模块、第一通信模块,设置于所述机器人上部的第二控制模块、检测模块、第二通信模块,用于公共建筑物内;
3、所述方法包括:
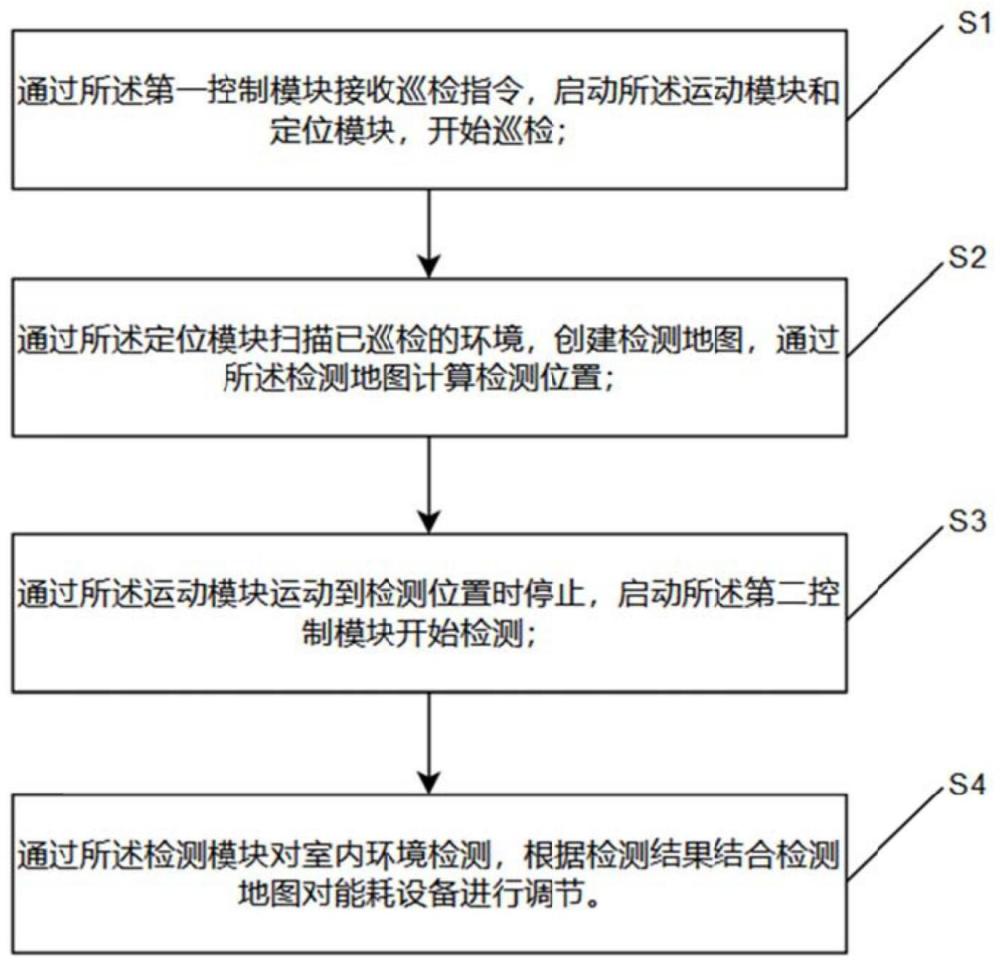
4、通过所述第一控制模块接收巡检指令,启动所述运动模块和定位模块,开始巡检;
5、通过所述定位模块扫描已巡检的环境,创建检测地图,通过所述检测地图计算检测位置;
6、通过所述运动模块运动到检测位置时停止,启动所述第二控制模块开始检测;
7、通过所述检测模块对室内环境检测,根据检测结果结合检测地图对能耗设备进行调节。
8、进一步,所述第一控制模块分别与所述定位模块、运动模块、第一通信模块电连接;
9、所述定位模块,用于定位所述机器人的位置和路径,建立检测地图;
10、所述运动模块,用于根据所述定位模块定位的位置和路径带动所述机器人移动;
11、所述第一通信模块,用于与相应的服务器通信;
12、所述第二控制模块分别与所述检测模块、第二通信模块电连接;
13、所述检测模块,用于检测所述机器人当前运行所处的空间的环境参数,根据环境参数判断调节参数;
14、所述第二通信模块,用于根据调节参数控制能耗设备的工作模式。
15、进一步,所述通过所述第一控制模块接收巡检指令,启动所述运动模块和定位模块,开始巡检包括:
16、通过所述服务器下发巡检指令,其中所述巡检指令包括:巡检时间、巡检路线、巡检内容;
17、所述第一控制模块按照所述巡检时间启动所述运动模块和所述定位模块;
18、通过所述运动模块按照所述巡检路线行进,所述定位模块实时定位所述机器人所在位置坐标;
19、当所述定位模块定位到停止位置时,通过所述第一控制模块向所述运动模块下发停止指令。
20、进一步,所述定位模块包括:
21、雷达模块,设置于所述机器人下部前进端,用于定位所述机器人与环境障碍物的距离;
22、摄像模块,设置于所述机器人下部前进端,用于识别环境障碍物以及能耗设备。
23、进一步,所述通过所述定位模块扫描已巡检的环境,创建检测地图,通过所述检测地图计算检测位置包括:
24、通过所述雷达模块扫描周围环境,根据雷达反射信息获取墙体和障碍物位置信息,创建基础检测地图;
25、通过所述摄像模块采集周围环境图像信息,根据环境图像信息提取障碍物和能耗设备位置特征,叠加至基础检测地图中,生成所述检测地图;
26、根据所述检测地图计算划分出待检测区域,选择检测区域中心位置作为所述检测位置。
27、进一步,所述检测模块包括以下至少一个模块:
28、空气检测模块,用于检测所述机器人所在空间的二氧化碳的浓度;
29、温度检测模块,用于检测所述机器人所在空间的空气温度;
30、湿度检测模块,用于检测所述机器人所在空间的空气湿度;
31、光线检测模块,用于检测所述机器人所在空间的照明亮度;
32、红外检测模块,用于结合所述摄像模块检测所述机器人所在空间的人数,配合所述空气检测模块、温度检测模块、湿度检测模块、光线检测模块判断所述调节参数。
33、进一步,所述通过所述运动模块运动到检测位置时停止,启动所述第二控制模块开始检测包括:
34、通过所述第一控制模块唤醒所述第二控制模块,所述第二控制模块启动;
35、通过所述空气检测模块检测和记录所述机器人所在所述检测位置的二氧化碳的浓度;
36、通过所述温度检测模块检测和记录所述机器人所在所述检测位置的温度;
37、通过所述湿度检测模块检测和记录所述机器人所在所述检测位置的湿度;
38、通过所述红外检测模块和摄像模块检测和记录所述机器人所在所述检测位置的人数;
39、通过所述光线检测模块检测和记录所述机器人所在所述检测位置的光线强弱。
40、进一步,所述通过所述检测模块对室内环境检测,根据检测结果结合检测地图对能耗设备进行调节包括:
41、根据所述检测地图,获取所述能耗设备的位置坐标,计算所述能耗设备与每个所述检测位置的直线距离;
42、选取距离所述能耗设备直线距离最近的n个所述检测位置的检测值,所述检测值包括:温度值、二氧化碳的浓度值、湿度值、室内人数、光线亮度;
43、计算所述能耗设备直线距离最近的n个所述检测位置的检测值的平均值,将该平均值作为调节参数;
44、根据所述调节参数调节对应的所述能耗设备的工作模式。
45、进一步,所述根据所述调节参数调节对应的所述能耗设备的工作模式:
46、当所述温度值不在室外温度的70%-80%之间时,且所述室内人数≥1人时,调节空调的温度,使其和室外温度;
47、当所述二氧化碳的浓度值不在室外二氧化碳浓度的80-100%之间时,且所述室内人数≥1人时,调节空调的新风频率;
48、当所述湿度值高于室外湿度时,且所述室内人数≥1人数时,开启空调的除湿模式;
49、当所述光线亮度值高于或者低于人眼舒适亮度时候,且所述室内人数≥1人时,调节照明设备的亮度。
50、进一步,所述第一控制模块电连接有清洗模块,所述清洗模块设置于所述机器人下部的前进端,用于所述机器人所在地面的扫地和洗地。
51、本发明的有益效果:
52、一是本发明机器人可以用于一些建筑年龄较大的公共建筑物,由于建筑内能耗设备安装使用时限较久,且无法整体更换节能方案的情况,对现有的公共建筑物内无法进行大规模节能改动,例如:更换具有网络功能的能耗设备、室内网络重新布线、加装传感器无法取电等,通过本发明机器人进行定时定点巡检,节约劳动力资源,在巡检同时可以对目标建筑物内地面进行清扫和清洗,实现多功能复用。
53、二是本技术中机器人可以在运动过程中,同时通过雷达模块和摄像模块确定检测地图,检测地图包括了固定障碍物位置和能耗设备的位置特征,便于划分检测区域,检测区域需要避开固定障碍物位置,并且检测区域的数量需要根据能耗设备的数量进行确定,提高检测的精准度。
54、三是根据能耗设备的位置选取距离最近的3个或者4个检测位置的检测值的平均值作为调节参数,使用能耗设备周围多个环境参数进行调节参数的确定,极大的调高了调节的精准度。本技术调节的依据是根据室外环境参数进行确定和优化的,确保能耗设备与外界环境值不会相差过大,实现能耗设备的低碳节能。
- 还没有人留言评论。精彩留言会获得点赞!