一种基于加速度控制的机械手运动轨迹优化方法及系统与流程
本发明涉及机器人。更具体地,涉及一种基于加速度控制的机械手运动轨迹优化方法及系统。
背景技术:
1、现有的工业机器人离线轨迹规划方法,只给出了各轨迹点的位置信息和机器人姿态信息,机器人在运动开始和结束时,都会出现急起和急停的现象,并导致机器人发生振动和冲击。这种现象虽然只是存在于一段运动轨迹的开始阶段和结尾阶段,但是也会影响机器人作业效果,而且在长期使用后,必然会导致机器人磨损与定位精度降低。出现这种情况的原因,是因为该轨迹规划方法规划出的运动不存在明显加速区间段和减速区间段,而是间隔均匀的轨迹点。
2、机器人开始运动时,从静止状态经过非常短暂的加速时间,将运动速度增加到预设值,然后保持匀速状态,直到运动即将结束,再次以非常短暂的时间完成减速。此外,整个运动过程中,加速阶段和减速阶段的加速度峰值很高。因此,现有的工业机器人离线轨迹规划方法的运动过程在开始和结束时存在急起急停的问题,从而由于巨大的加速度产生冲击力使机器人运动存在冲击和振动。
技术实现思路
1、本发明的目的在于提供一种基于加速度控制的机械手运动轨迹优化方法及系统,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本发明采用下述技术方案:
3、本发明第一方面提供了一种基于加速度控制的机械手运动轨迹优化方法,该方法包括
4、对机械手运动轨迹进行直线轨迹插补;
5、获取所述机械手的控制周期并根据所述控制周期计算所述机械手在运动过程中每秒钟运动的距离;
6、获取所述机械手在所述运动过程的各个参数;
7、根据所述各个参数计算所述机械手在各个插值区间末的对应时刻的距离;
8、根据所述控制周期和所述各个参数计算所述机械手在所述各个插值区间内的每个周期的插值点数和所述各个插值区间内的所有周期的总插值点数;
9、将所述每个周期的插值点数等分到对应的周期内得到待插值点的位置,并计算所述待插值点与插值起始点的距离;
10、根据所述待插值点与插值起始点的距离计算所述待插值点的位置和姿态。
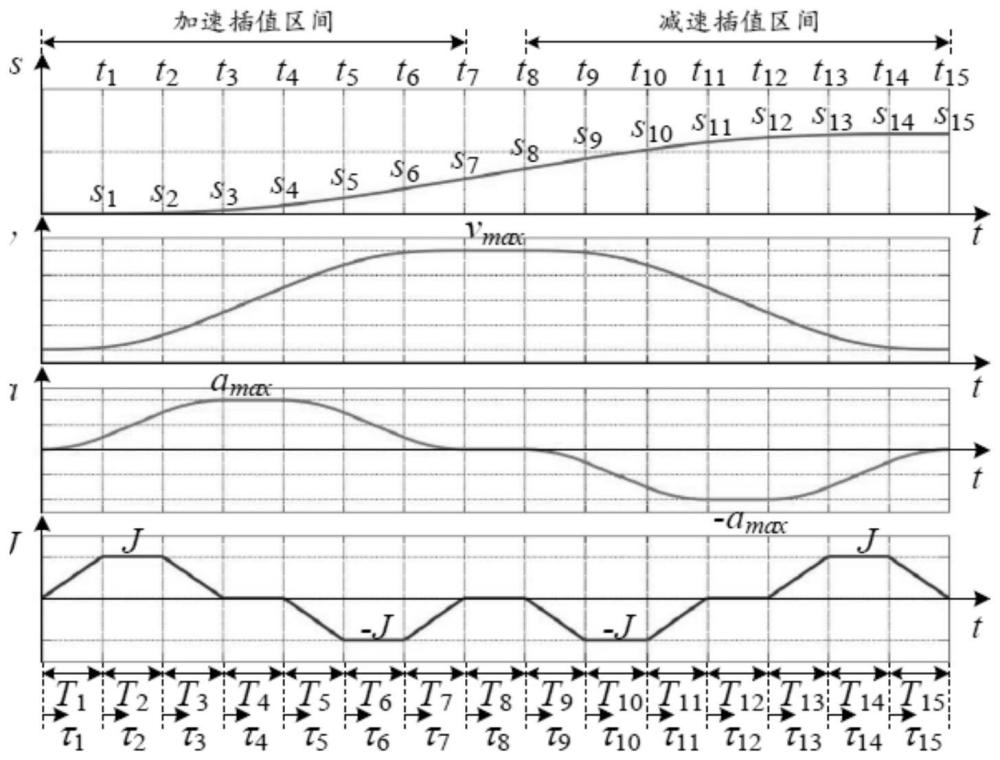
11、可选地,所述各个插值区间包括加速插值区间和减速插值区间;
12、所述运动过程包括与所述加速插值区间对应的加速过程、以最大速度运行的匀速过程和与所述减速插值区间对应的减速过程;其中
13、所述加速过程的起始速度和所述减速过程的终止速度均为0。
14、可选地,所述加速过程包括加加速度从0开始线性增大的第一阶段、加加速度等于最大值的第二阶段、加加速度线性减小到0的第三阶段、加加速度等于0的第四阶段、与所述第一阶段的加加速度方向相反的加加速度从0线性增大的第五阶段、与所述第二阶段的加加速度方向相反的加加速度等于最大值的第六阶段和与所述第三阶段的加加速度方向相反的加加速度线性减小到0的第七阶段;
15、所述匀速过程包括加加速度等于0的第八阶段;
16、所述减速运动包括与所述第一阶段的加加速度方向相反的加加速度从0线性增大的第九阶段、与所述第二阶段的加加速度方向相反的加加速度等于最大值的第十阶段、与所述第三阶段的加加速度方向相反的加加速度线性减小到0的第十一阶段、加加速度等于0的第十二阶段、从0开始线性增大的第十三阶段、加加速度等于最大值的第十四阶段和加加速度线性减小到0的第十五阶段;其中
17、所述第一阶段、所述第三阶段、所述第五阶段、所述第七阶段、所述第九阶段、所述第十一阶段、所述第十三阶段和所述第十五阶段的周期相等;
18、所述第二阶段、所述第六阶段、所示第十阶段和所述第十四阶段的周期相等;
19、所述第四阶段和所述第十二阶段的周期相等。
20、可选地,所述获取所述机械手在所述运动过程的各个参数包括
21、根据实际应用情况分别确定所述第一阶段、所述第二阶段、所述第四阶段和所述第八阶段的周期的取值;
22、根据所述实际应用情况确定机械手正常检测时的运动速度;
23、根据所述机械手正常检测时的运动速度和每个阶段内所对应的速度计算加加速度系数;
24、根据所述加加速度系数和所述每个阶段内的时间坐标计算最大加速度;
25、判断所述最大加速度是否小于预设的最大加速度;
26、若是,则根据所述各个参数计算所述机械手在各个插值区间末的对应时刻的距离。
27、可选地,所述根据所述机械手正常检测时的运动速度和每个阶段内所对应的速度计算加加速度系数包括
28、根据所述机械手正常检测时的运动速度与所述第一阶段内的速度、第二阶段内的速度、所述第三阶段内的速度、所述第四阶段内的速度、所述第五阶段内的速度、所述第六阶段内的速度和所述第七阶段内的速度的对应关系计算所述加加速度系数;其中
29、所述机械手正常检测时的运动速度等于所述第七阶段内的速度。
30、可选地,所述根据所述加加速度系数和所述每个阶段内的时间坐标计算最大加速度包括
31、根据所述加加速度系数和所述每个阶段内的时间坐标计算所述每个阶段内的加速度,并根据所述每个阶段内的加速度得到所述最大加速度。
32、可选地,所述根据所述各个参数计算所述机械手在各个插值区间末的对应时刻的距离包括
33、根据所述各个参数计算所述机械手在与所述加速插值区间末相对应时刻的位移和所述机械手在与所述减速速插值区间末相对应时刻的位移。
34、可选地,所述计算所述机械手在与所述加速插值区间末相对应时刻的位移包括
35、计算所述第七阶段内的速度在所述第七阶段内的时间内的积分,得到所述机械手在与所述加速插值区间末相对应时刻的位移;和
36、所述计算所述机械手在与所述减速插值区间末相对应时刻的位移包括
37、计算所述第十五阶段内的速度在所述第十五阶段内的时间内的积分,得到所述机械手在与所述减速插值区间末相对应时刻的位移。
38、可选地,所述根据所述控制周期和所述各个参数计算所述机械手在所述各个插值区间内的每个周期的插值点数和所述各个插值区间内的所有周期的总插值点数包括
39、计算所述机械手在所述加速插值区间内的每个阶段内的插值点数和所述加速插值区间内的所有阶段内的总插值点数;和
40、计算所述机械手在所述减速插值区间内的每个阶段内的插值点数和所述减速插值区间内的所有阶段内的总插值点数。
41、本发明第二方面提供了一种基于加速度控制的机械手运动轨迹优化系统,该系统包括
42、第一插补模块,用于对机械手运动轨迹进行直线轨迹插补;
43、第一计算模块,用于获取所述机械手的控制周期并根据所述控制周期计算所述机械手在运动过程中每秒钟运动的距离;
44、参数获取模块,用于获取所述机械手在所述运动过程的各个参数;
45、第二计算模块,用于根据所述各个参数计算所述机械手在各个插值区间末的对应时刻的距离;
46、第三计算模块,用于根据所述控制周期和所述各个参数计算所述机械手在所述各个插值区间内的每个周期的插值点数和所述各个插值区间内的所有周期的总插值点数;
47、第四计算模块,用于将所述每个周期的插值点数等分到对应的周期内得到待插值点的位置,并计算所述待插值点与插值起始点的距离;
48、第五计算模块,用于根据所述待插值点与插值起始点的距离计算所述待插值点的位置和姿态。
49、本发明的有益效果如下:
50、本发明提出了一种基于加速度控制的机械手运动轨迹优化方法,有效实现对机械手启停过程的加速度控制,实现机械手平稳启动与停止;同时对机器人进行轨迹插补,在提高运动平稳性的同时不改变机器人的运动轨迹。
- 还没有人留言评论。精彩留言会获得点赞!