一种多机器人基坐标系的标定方法、装置、设备及介质与流程
本发明涉及机器人标定,尤其涉及一种多机器人基坐标系的标定方法、装置、设备及介质。
背景技术:
1、坐标系标定在多机器人系统中具有重要性,它对于确保多个机器人之间的协同工作、精确感知和准确控制至关重要,可以确保不同机器人之间的位置和姿态信息在共享任务中一致,从而有助于避免误差累积和不协调的问题。但现有标定方法具有许多常见的问题和限制,包括:复杂性和耗时,坐标系标定通常需要进行多次实验和数据采集,而且需要精确的测量和校准,这使得标定过程复杂且耗时。误差累积,多机械臂系统中的每个机械臂都可能引入误差,这些误差会在标定过程中累积,导致最终的标定结果不够准确。传感器噪音,使用传感器进行坐标系标定时,传感器的噪音和不确定性可能会影响标定结果的准确性。
2、因此,如何提供一种更简单方便、精确度更高的标定方法,是该领域亟待解决的技术问题。
技术实现思路
1、基于此,本申请目的在于提供一种多机器人基坐标系的标定方法、装置、设备及介质,来解决上述背景技术中提及的至少一个技术问题。
2、第一方面,本发明提供一种多机器人基坐标系的标定方法,方法包括:
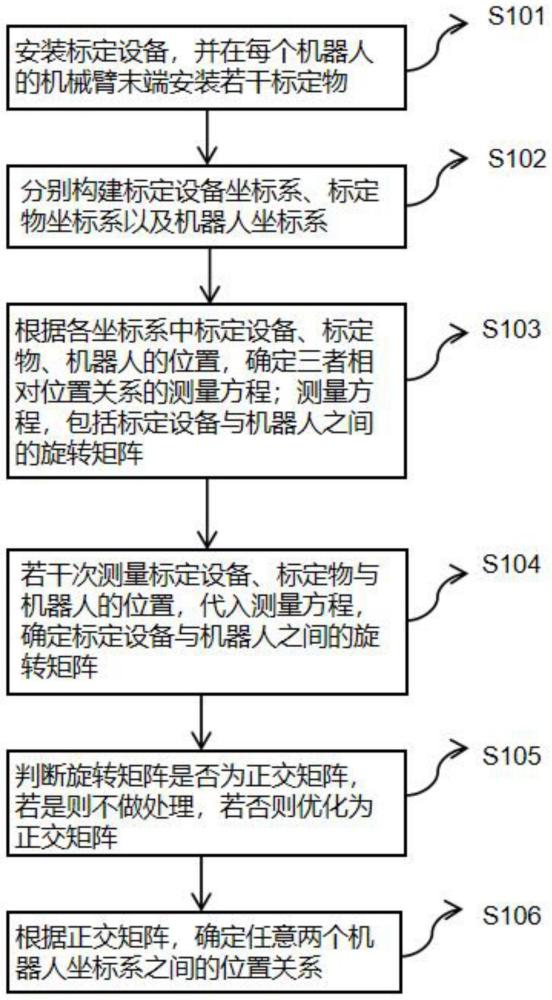
3、安装标定设备,并在每个机器人的机械臂末端安装若干标定物;
4、分别构建标定设备坐标系、标定物坐标系以及机器人坐标系;
5、根据各坐标系中标定设备、标定物、机器人的位置,确定三者相对位置关系的测量方程;测量方程,包括标定设备与机器人之间的旋转矩阵。
6、若干次测量标定设备、标定物与机器人的位置,代入测量方程,确定标定设备与机器人之间的旋转矩阵;
7、判断旋转矩阵是否为正交矩阵,若是则不做处理,若否则优化为正交矩阵;
8、根据正交矩阵,确定任意两个机器人坐标系之间的位置关系。
9、进一步的,所述若干次测量标定设备、标定物与机器人的位置,代入测量方程,确定标定设备与机器人之间的旋转矩阵,包括:
10、若干次测量标定设备、标定物与机器人的位置,得到多个测量方程;
11、对多个测量方程依次作差得到差分方程;
12、对差分方程进行转置,并使用最小二乘法,确定标定设备与机器人之间的旋转矩阵。
13、可选地,测量方程为:
14、
15、其中,r表示旋转矩阵,△p表示相对位置,m表示标定设备坐标系,b表示机器人坐标系,t表示标定物坐标系,i表示第i个机器人,1≤i≤a,a表示机器人的数量;n表示作差次数。
16、进一步的,所述判断旋转矩阵是否为正交矩阵,若是则不做处理,若否则优化为正交矩阵,包括:
17、当旋转矩阵不为正交矩阵时,设定代价矩阵,并转为一个有约束极值的问题;
18、在求解有约束极值的问题时,引入拉格朗日乘子;
19、求引入拉格朗日乘子后有约束极值的问题的极值点,确定正交矩阵。
20、可选地,代价矩阵为:
21、
22、其中,c为代价函数,为待确定的正交矩阵,f为度量标准,rot()表示将四元数转换为旋转矩阵的函数,q0,q1,q2,q3满足关系
23、进一步的,所述根据正交矩阵,确定任意两个机器人坐标系之间的位置关系,具体包括:
24、计算正交矩阵的旋转分量;
25、将旋转矩阵代入测量方程,获得正交矩阵的位置分量;
26、根据位置分量进行坐标系转换,确定任意两个机器人坐标系之间的位置关系。
27、进一步的,所述方法还包括:
28、计算基坐标系之间的姿态误差和位置误差;
29、根据姿态误差和位置误差判断标定结果准确性。
30、第二方面,本发明提供一种多机器人基坐标系的标定方法的装置,包括:
31、安装模块,安装标定设备,并在每个机器人的机械臂末端安装若干标定物;
32、坐标系构建模块,与安装模块连接,用于分别构建标定设备坐标系、标定物坐标系以及机器人坐标系;
33、方程模块,与坐标系构建模块连接,用于根据各坐标系中标定设备、标定物、机器人的位置,确定三者相对位置关系的测量方程;测量方程,包括标定设备与机器人之间的旋转矩阵。
34、旋转矩阵构建模块,与方程模块连接,用于若干次测量标定设备、标定物与机器人的位置,代入测量方程,确定标定设备与机器人之间的旋转矩阵;
35、判断模块,与旋转矩阵构建模块连接,用于判断旋转矩阵是否为正交矩阵,若是则不做处理,若否则优化为正交矩阵;
36、位置关系获取模块,与判断模块连接,用于根据正交矩阵,确定任意两个机器人坐标系之间的位置关系。
37、第三方面,本发明提供一种电子设备,设备包括:处理器,以及与处理器耦接的存储器;存储器上存储有可在处理器上运行的多机器人基坐标系的标定方法的程序,多机器人基坐标系的标定方法的程序被处理器执行时实现如上述第一方面的多机器人基坐标系的标定方法的步骤。
38、第四方面,本发明提供一种计算机存储介质,存储有多机器人基坐标系的标定方法的程序,多机器人基坐标系的标定方法的程序被处理器执行时实现如上述第一方面的多机器人基坐标系的标定方法的步骤。
39、本发明提供的一种多机器人基坐标系的标定方法、装置、设备及介质,通过构建标定设备坐标系、标定物坐标系以及机器人坐标系,然后构建机器人坐标系与标定设备坐标系之间的旋转矩阵,并进行优化,将多机器人坐标系统一到标定设备坐标系下,再转换成不同机器人坐标系之间的相对关系,避免了多次采集数据导致的累积误差,并且提高了标定效率,节约大量步骤。解决了现有标定方法累计误差大,算法难度高,且需要多次重复采集数据,导致耗时长,实施不方便的问题。
技术特征:
1.一种多机器人基坐标系的标定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述若干次测量标定设备、标定物与机器人的位置,代入测量方程,确定标定设备与机器人之间的旋转矩阵,包括:
3.根据权利要求2所述的方法,其特征在于,测量方程为:
4.根据权利要求1所述的方法,其特征在于,所述判断旋转矩阵是否为正交矩阵,若是则不做处理,若否则优化为正交矩阵,包括:
5.根据权利要求1所述的方法,其特征在于,代价矩阵为:
6.根据权利要求1所述的方法,其特征在于,所述根据正交矩阵,确定任意两个机器人坐标系之间的位置关系,具体包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种多机器人基坐标系的标定方法的装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述设备包括:处理器,以及与处理器耦接的存储器;所述存储器上存储有可在处理器上运行的多机器人基坐标系的标定方法的程序,所述多机器人基坐标系的标定方法的程序被处理器执行时实现如权利要求1至7中任一项所述的多机器人基坐标系的标定方法的步骤。
10.一种计算机存储介质,其特征在于,存储有多机器人基坐标系的标定方法的程序,所述多机器人基坐标系的标定方法的程序被处理器执行时实现如权利要求中1至7中任一项所述的多机器人基坐标系的标定方法的步骤。
技术总结
本申请涉及一种多机器人基坐标系的标定方法、装置、设备及介质。通过构建标定设备坐标系、标定物坐标系以及机器人坐标系,然后构建机器人坐标系与标定设备坐标系之间的旋转矩阵,并进行优化,将多机器人坐标系统一到标定设备坐标系下,再转换成不同机器人坐标系之间的相对关系,避免了多次采集数据导致的累积误差,并且提高了标定效率,节约大量步骤。解决了现有标定方法累计误差大,算法难度高,且需要多次重复采集数据,导致耗时长,实施不方便的问题。
技术研发人员:胡韶,邱蜀伟
受保护的技术使用者:湖南视比特机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!