水池清洁机器人和具有其的水池清洁系统的制作方法
本申请涉及水池清洁,尤其是涉及一种水池清洁机器人和具有其的水池清洁系统。
背景技术:
1、相关技术中的水池清洁机器人,具备移动能力,能够对水池的不同区域进行清洁,然而由于水池清洁机器人没有视觉功能,因此在执行清扫任务时不够有效地对具有垃圾区域进行重点清洁,只能进行简单地循环清扫,清洁效果差,且能耗高。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,该水池清洁机器人具有清洁效果好且能耗低的优点。
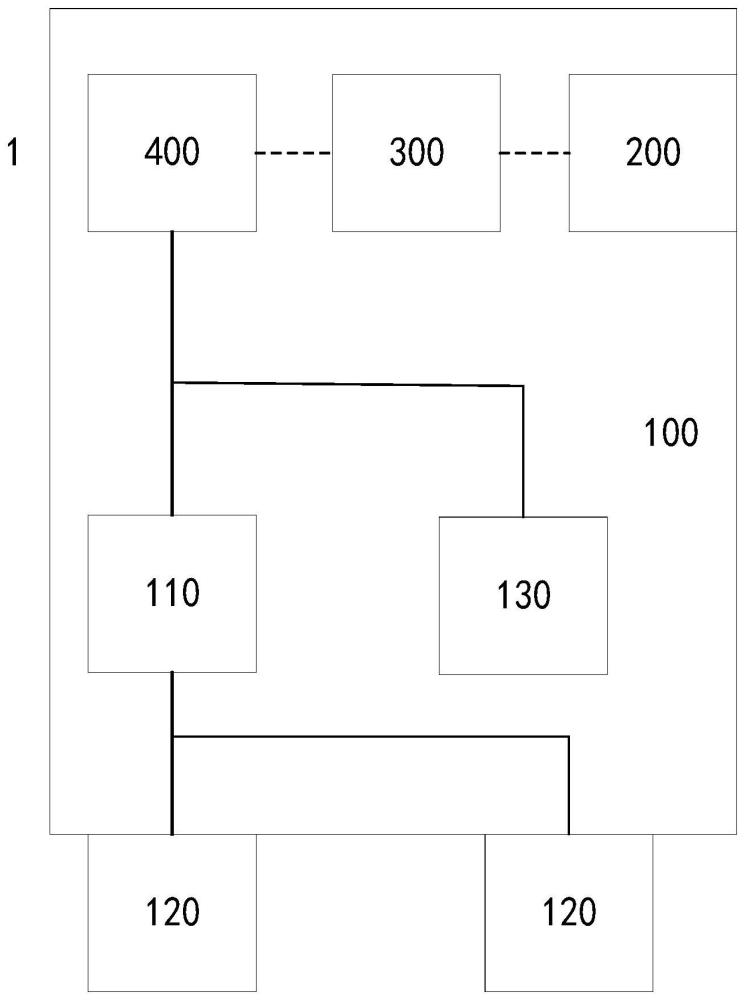
2、为了实现上述目的,根据本申请的第一方面实施例提出了一种水池清洁机器人,包括:机体,所述机体设有至少一个进水口和至少一个出水口;过滤单元,用于过滤从所述进水口进入的液体,过滤后从所述出水口排出;行走单元,用于在水池内与浸润表面进行接触,且可相对所述机体转动;控制单元,设于所述机体,控制所述水池清洁机器人;图像采集单元,所述图像采集单元设于所述机体,用于获取水池内图像信息,所述控制单元和所述图像采集单元之间的通信包括非电通信。
3、根据本申请的第一方面实施例的水池清洁机器人具有清洁效果好且能耗低的优点。
4、在本申请的一些实施例中,所述非电通信包括光通信、声通信、磁通信以及振动通信中的至少一种。
5、在本申请的一些实施例中,所述图像采集单元包括:感光元件,所述感光元件与所述控制单元之间的通信包括非电通信。
6、在本申请的一些实施例中,所述水池清洁机器人还包括:图像处理单元,所述图像处理单元与所述控制单元电通信,所述图像处理单元与所述图像采集单元非电通信;或所述图像处理单元与所述控制单元非电通信,所述图像处理单元与所述图像采集单元电通信;所述图像处理单元与所述控制单元非电通信,所述图像处理单元与所述图像采集单元通过另一个所述非电通信单元非电通信。
7、在本申请的一些实施例中,所述控制单元根据所述图像采集单元的获取结果控制所述行走单元的运动。
8、在本申请的一些实施例中,所述水池清洁机器人还包括:抽吸单元,所述抽吸单元设于所述机体且与所述控制单元通信;其中,所述控制单元根据所述图像采集单元的获取结果控制所述抽吸单元的运动。
9、在本申请的一些实施例中,所述非电通信的实现方式包括通过含有非电信号的通信器件实现;所述图像采集单元包括相机和/或摄像头。
10、根据本申请的第二方面实施例提出了一种水池清洁系统,包括根据本申请的第一方面实施例所述的水池清洁机器人。
11、根据本申请的第二方面实施例的水池清洁系统,通过利用根据本申请的第一方面实施例的水池清洁机器人,具有清洁效果好且能耗低的优点。
12、在本申请的一些实施例中,所述水池清洁系统还包括:发光单元,所述发光单元用于改变所述水池清洁机器人所处的光环境,所述发光单元的光照区域与所述图像采集单元的图像采集区域至少部分重叠。
13、在本申请的一些实施例中,所述水池清洁系统还包括:光强检测模块,所述光强检测模块与所述控制单元电通信,用于检测环境光强,所述控制单元根据所述光强检测模块的检测结果调节所述发光单元的光照强度和/或光频率;和/或时间获取模块,所述时间获取模块与所述控制单元电通信,用于获取当前时间,所述控制单元根据所述时间获取模块的获取结果调节所述发光单元的光照强度和/或光频率。
14、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种水池清洁机器人,其特征在于,包括:
2.根据权利要求1所述的水池清洁机器人,其特征在于,所述非电通信包括光通信、声通信、磁通信以及振动通信中的至少一种。
3.根据权利要求1所述的水池清洁机器人,其特征在于,所述图像采集单元包括:
4.根据权利要求1所述的水池清洁机器人,其特征在于,还包括:
5.根据权利要求1所述的水池清洁机器人,其特征在于,所述控制单元根据所述图像采集单元的获取结果控制所述行走单元的运动。
6.根据权利要求1所述的水池清洁机器人,其特征在于,还包括:
7.根据权利要求1所述的水池清洁机器人,其特征在于,所述非电通信的实现方式包括通过含有非电信号的通信器件实现;
8.一种水池清洁系统,其特征在于,包括根据权利要求1-7中任一项所述的水池清洁机器人。
9.根据权利要求8所述的水池清洁系统,其特征在于,还包括:
10.根据权利要求8所述的水池清洁系统,其特征在于,还包括:
技术总结
本申请公开了一种水池清洁机器人和具有其的水池清洁系统,包括:机体,所述机体设有至少一个进水口和至少一个出水口;过滤单元,用于过滤从所述进水口进入的液体,过滤后从所述出水口排出;行走单元,用于在水池内与浸润表面进行接触,且可相对所述机体转动;控制单元,设于所述机体,控制所述水池清洁机器人;图像采集单元,所述图像采集单元设于所述机体,用于获取水池内图像信息,所述控制单元和所述图像采集单元之间的通信包括非电通信。根据本申请实施例的水池清洁机器人具有清洁效果好且能耗低的优点。
技术研发人员:霍峰,李笑天,薛诚
受保护的技术使用者:天津望圆智能科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!