多关节设备的双电机模块及其应用和机器人的制作方法
本申请涉及机器人电机结构设计,尤其涉及多关节设备的双电机模块及其在运动对象的两个关节的应用和机器人。
背景技术:
1、电机结构设计,例如是双足机器人的腿部关节电机结构设计是一个非常复杂的任务,设计过程需要考虑多种不同因素。相关技术的机器人腿部关节电机使用外转子电机(定子在内部,转子在外圈),此种电机存在散热困难的问题,因此需要在电机内部设置液冷机构来给电机散热,这增加了结构的复杂程度与制造成本。
2、基于此,本申请提供了多关节设备的双电机模块及其在运动对象的两个关节的应用和机器人,以改进相关技术。
技术实现思路
1、本申请的目的在于提供多关节设备的双电机模块及其在运动对象的两个关节的应用和机器人,两个电机转子采用同轴设计,至少一个电机组件为内转子电机,以改善散热性能,减小外壳厚度。
2、本申请的目的采用以下技术方案实现:
3、第一方面,本申请提供了一种多关节设备的双电机模块,所述双电机模块包括第一电机组件和第二电机组件,所述第一电机组件用于驱动所述多关节设备的第一关节,所述第二电机组件用于驱动所述多关节设备的第二关节;
4、所述第一电机组件包括第一电机模组,所述第一电机模组包括第一电机定子和第一电机转子;所述第二电机组件包括第二电机模组,所述第二电机模组包括第二电机定子和第二电机转子;
5、所述第一电机转子和所述第二电机转子采用同轴设计;
6、所述第一电机转子设置于所述第一电机定子的内侧,和/或,所述第二电机转子设置于所述第二电机定子的内侧。
7、第二方面,本申请提供了一种上述任一项多关节设备的双电机模块在多关节设备的两个关节的应用。
8、第三方面,本申请提供了一种机器人,包括至少两个关节和至少一个上述任一项多关节设备的双电机模块,所述双电机模块用于驱动两个关节。
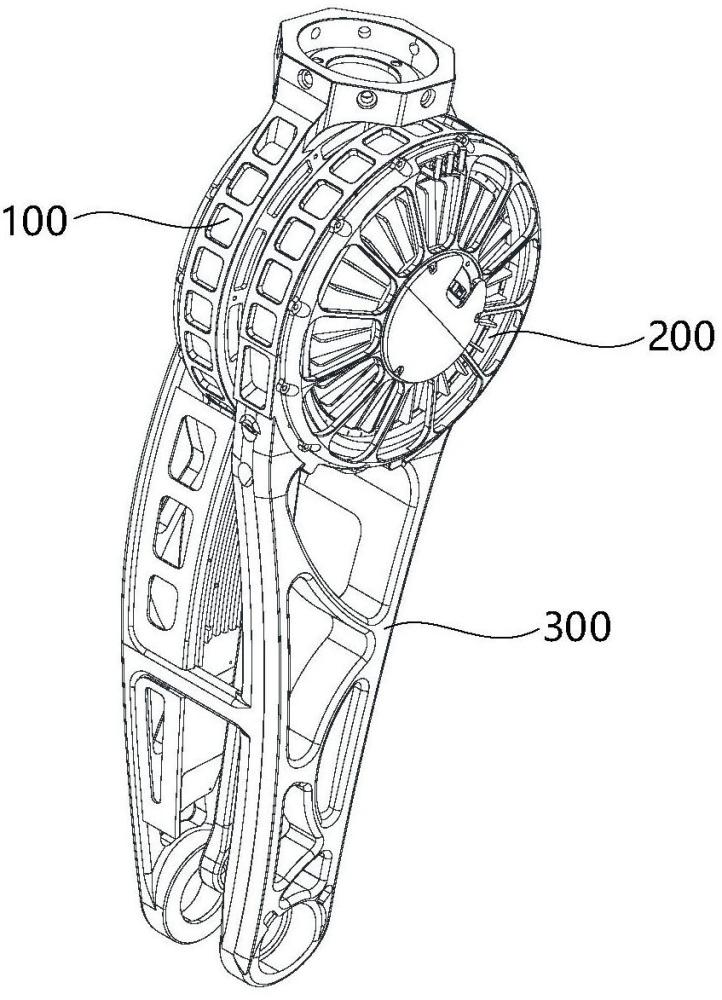
9、本申请提供的多关节设备的双电机模块及其在运动对象的两个关节的应用和机器人,在该双电机模块中,采用二合一设计、同轴设计和内转子电机设计。其中,两个电机组件采用一体化设计,合二为一。第一电机转子和第二电机转子采用同轴设计,即两个电机转子共用同一轴线,当将该双电机模块应用于双足机器人的腿部关节时,可以提高质心高度,降低腿部惯量。第一电机转子和/或第二电机转子设置于相应电机定子的内侧。内转子电机设计有助于更好地散热,因为电机定子可以直接与外壳接触,便于将热量传导到外部,改善散热性能。由于电机定子能够直接通过定子外壳散热,不需要额外设置液冷机构,因此减小了电机外壳的结构厚度。
技术特征:
1.一种多关节设备的双电机模块,其特征在于,所述双电机模块包括第一电机组件和第二电机组件,所述第一电机组件用于驱动所述多关节设备的第一关节,所述第二电机组件用于驱动所述多关节设备的第二关节;
2.根据权利要求1所述的多关节设备的双电机模块,其特征在于,所述第一电机转子设置于所述第一电机定子的内侧,所述第二电机转子设置于所述第二电机定子的内侧;
3.根据权利要求2所述的多关节设备的双电机模块,其特征在于,所述第一传动模组包括第一输入行星架和第一输出行星架,所述第二传动模组包括第二输入行星架和第二输出行星架,所述同轴保持部件为传动轴承;
4.根据权利要求3所述的多关节设备的双电机模块,其特征在于,所述第一电机组件还包括第一外壳模组,所述第一外壳模组包括可拆卸连接的第一定子外壳和第一电机盖;
5.根据权利要求4所述的多关节设备的双电机模块,其特征在于,所述第一电机定子用于通过所述第一定子外壳散热,所述第二电机定子用于通过所述第二定子外壳散热。
6.根据权利要求3所述的多关节设备的双电机模块,其特征在于,所述第二电机组件的靠近所述第一电机组件的一侧还设置有连杆模组,所述连杆模组包括连杆、连杆轴承和连杆轴,所述连杆轴承设置于所述连杆和所述连杆轴之间;
7.根据权利要求3所述的多关节设备的双电机模块,其特征在于,将所述第一电机组件去除所述第一输出行星架作为第一剩余部分,将所述第二电机组件去除所述第二输出行星架作为第二剩余部分,所述第一剩余部分和所述第二剩余部分成镜像排布。
8.根据权利要求7所述的多关节设备的双电机模块,其特征在于,所述第一剩余部分中包含的一个或多个第一零件,与所述第二剩余部分中包含的与一个或多个第一零件成镜像排布的一个或多个第二零件相匹配,以实现第一零件及其对应的第二零件之间的互换使用。
9.根据权利要求2所述的多关节设备的双电机模块,其特征在于,所述第一减速器模组和/或所述第二减速器模组采用斜齿轮传动。
10.根据权利要求2或9所述的多关节设备的双电机模块,其特征在于,所述第一减速器模组用于设置于所述第一电机转子的内侧,所述第一减速器模组包括第一太阳齿、第一行星齿和第一内齿圈;
11.根据权利要求1所述的多关节设备的双电机模块,其特征在于,所述第一电机模组还包括第一转子支架,所述第二电机模组还包括第二转子支架,所述第一转子支架和/或所述第二转子支架采用风扇形状。
12.根据权利要求1所述的多关节设备的双电机模块,其特征在于,所述双电机模块的一个或多个零件采用三轴加工方式制造得到。
13.一种权利要求1-12任一项所述的多关节设备的双电机模块在多关节设备的两个关节的应用。
14.根据权利要求13所述的双电机模块在多关节设备的两个关节的应用,其特征在于,所述多关节设备包括双足机器人、四足机器人、轮式机器人和机械臂系统中的一种或多种。
15.根据权利要求13所述的双电机模块在多关节设备的两个关节的应用,其特征在于,所述多关节设备为双足机器人或者四足机器人,所述两个关节包括髋关节和膝关节,所述双电机模块用于驱动所述髋关节和所述膝关节。
16.一种机器人,其特征在于,包括至少两个关节和至少一个权利要求1-12任一项所述的多关节设备的双电机模块,所述双电机模块用于驱动两个关节。
17.根据权利要求16所述的机器人,其特征在于,所述机器人为双足机器人或者四足机器人,所述至少两个关节包括髋关节和膝关节,所述双电机模块用于驱动所述髋关节和所述膝关节。
18.根据权利要求17所述的机器人,其特征在于,所述双电机模块包括第一电机组件和第二电机组件;
19.根据权利要求18所述的机器人,其特征在于,所述第一电机组件还包括第一定子外壳,所述第一定子外壳用于连接所述机器人的胯部结构;
技术总结
本申请提供了多关节设备的双电机模块及其应用和机器人,所述双电机模块包括第一电机组件和第二电机组件,所述第一电机组件用于驱动所述多关节设备的第一关节,所述第二电机组件用于驱动所述多关节设备的第二关节;所述第一电机组件包括第一电机模组,所述第一电机模组包括第一电机定子和第一电机转子;所述第二电机组件包括第二电机模组,所述第二电机模组包括第二电机定子和第二电机转子;所述第一电机转子和所述第二电机转子采用同轴设计;所述第一电机转子设置于所述第一电机定子的内侧,和/或,所述第二电机转子设置于所述第二电机定子的内侧。本申请便于将电机定子的热量传导到外部,改善散热性能,减小了电机外壳的结构厚度。
技术研发人员:请求不公布姓名,请求不公布姓名
受保护的技术使用者:上海智元新创技术有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!