一种基于北斗+3d高精度导航的机器人及摄像头安装装置的制作方法
本发明涉及机器人开发,尤其涉及一种基于北斗+3d高精度导航的机器人及摄像头安装装置。
背景技术:
1、机器人上的多源传感器信息融合处理是机器人自主感知、精确控制以及任务规划的关键,由于嵌入式平台具有体积小、功耗低和集成程度高等特点,嵌入式平台成为了机器人的主流研发平台。但目前的机器人一般情况下都需要定位、驱动和核心计算三个工控机以完成基本任务,因此现有机器人嵌入式平台普遍存在计算能力不足、硬件集成程度低、缺乏深度学习平台支持、缺乏环境智能感知能力等限制。
2、传统技术中常采用视觉中单目测距,使用单一模型导航的惯性位置推算分析数据进行导航,且利用北斗导航测量由于空间复杂性常存在误差,难以精确估计机器人的导航规划路径,导航的定位精度和可靠性较低。
技术实现思路
1、在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述传统技术中常采用视觉中单目测距,使用单一模型导航的惯性位置推算分析数据进行导航,且利用北斗导航测量由于空间复杂性常存在误差,难以精确估计机器人的导航规划路径,导航的定位精度和可靠性较低的问题,提出了本发明。
3、为解决上述技术问题,本发明提供如下技术方案:一种基于北斗+3d高精度导航的机器人,包括多态导航系统,所述多态导航系统包括三维视觉联动导航单元、位置推算导航单元、智能分析系统、预处理系统、辅端衍生系统、随行成像导航单元、智能终端、数据采集端和智能处理端;
4、所述三维视觉联动导航单元包括三维构建导航和视觉定位引导,所述智能分析系统包括动态运动分析。
5、作为本发明所述基于北斗+3d高精度导航的机器人的一种优选方案,其中:所述位置推算导航单元包括模拟组件和生成组件,所述模拟组件包括步态计数模拟、智能配对单元和任务规划单元;
6、所述预处理系统包括预处理数据单元和数据处理转换,所述预处理数据单元包括数据分类单元、数据联动单元、代入转换单元和数据传输单元;
7、所述辅端衍生系统包括转换数据分析和数据配对调用;
8、所述随行成像导航单元包括环境板图联接,所述环境板图联接包括历史环境建立、当前环境替换、随行环境分析和随行环境成像。
9、作为本发明所述基于北斗+3d高精度导航的机器人的一种优选方案,其中:所述智能终端包括终端处理模块和终端成像收发模块,所述终端成像收发模块包括成像分析单元和问题集合单元;
10、所述数据采集端包括第一数据采集组件和第二数据采集组件,所述第一数据采集组件包括北斗导航采集、三维数据采集、多组传感采集和公有图像采集,所述第二数据采集组件包括当前环境数据和阶段性随行环境数据;
11、所述智能处理端包括处理运行模块和分析出图模块。
12、本发明的有益效果:该机器人在使用时,根据内置系统进行精准导航,机器人本体根据系统获取的导航数据驱动下端的行走机构进行规划路线行走,同时根据用户需要将上端的升降组件进行提升,此时可观察升降组件所处位置快速找到该机器人所处位置,且在系统获取导航路径时,机器人根据自身携带的多组传感装置和采像组件对导航路径中的实际环境进行获取并替换,且根据系统采集获取替换的数据进行导航路径的数据更新,同时在处于复杂结构框架空间内部时,机器人本体先根据北斗导航获取当前所处位置后根据所处位置进行当前位置的数据获取,包括当前位置信息和所处位置的空间规划信息,并由采像组件确定当前所处位置获取信息,两者数据代入分析从而快速分析出当前所处位置,根据所处位置进行目的地位置的二次规划。
13、鉴于在实际使用过程中,在摄像头出现损坏的情况时,不便于对摄像头进行检修和更换的问题。
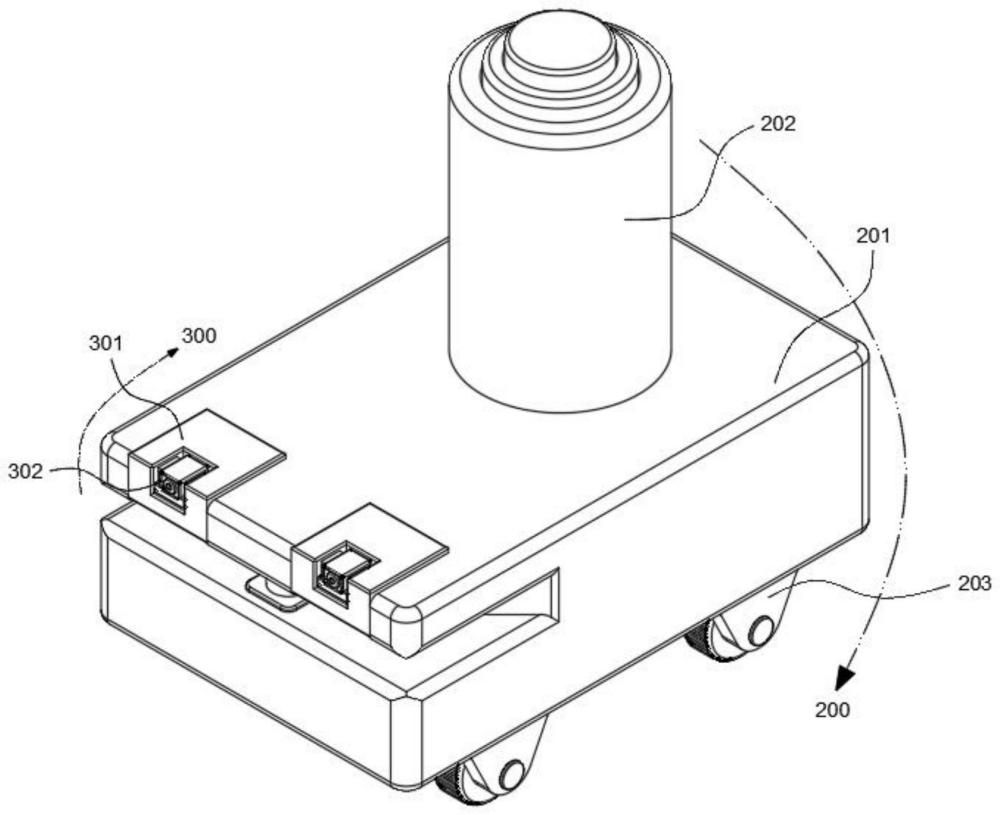
14、为解决上述技术问题,本发明还提供如下技术方案:一种摄像头安装装置,包括机器人单元,所述机器人单元包括机器人本体和安装在机器人本体上端的升降组件,所述机器人本体的下端安装有移动组件;
15、安装单元,所述安装单元包括底座组件和安装在底座组件内部的采像组件。
16、作为本发明所述摄像头安装装置的一种优选方案,其中:所述底座组件包括底座本体和设置在底座本体内部的安装限位件,且安装限位件的一端连接有中间连动件,所述中间连动件的下端连接有主动固定件,且主动固定件的一侧连接有调节螺杆。
17、作为本发明所述摄像头安装装置的一种优选方案,其中:所述安装限位件包括限位固定结构和连接在限位固定结构下端的限位卡合结构;
18、所述限位固定结构包括限位固定外壳和设置在限位固定外壳内部的限位固定卡块,且限位固定卡块的一端连接有限位移动杆,所述限位固定卡块的一端上侧连接有限位挡板;
19、所述限位卡合结构包括限位卡合连杆和连接在限位卡合连杆外部的限位环板。
20、作为本发明所述摄像头安装装置的一种优选方案,其中:所述中间连动件包括中间移动横板和连接在中间移动横板上端的连接立杆,且连接立杆的一端连接有转动连接杆,所述中间移动横板的下端连接有固定卡块结构,且中间移动横板的内部安装有限位立杆。
21、作为本发明所述摄像头安装装置的一种优选方案,其中:所述固定卡块结构包括固定卡块本体和设置在固定卡块本体内部的移动卡块,所述移动卡块的一端连接有限位移块。
22、作为本发明所述摄像头安装装置的一种优选方案,其中:所述主动固定件包括固定连接移板和连接在固定连接移板两端的限位连接移板,所述固定连接移板的内部设置有移动连接卡块。
23、作为本发明所述摄像头安装装置的一种优选方案,其中:所述采像组件包括采像底座和连接在采像底座上端的采像摄像头。
24、本发明的有益效果:通过设置有机器人单元和安装单元,通过底座组件将采像组件安装在机器人单元上,之后利用调节螺杆的调节来控制主动固定件的上下移动,进而对中间连动件的位置进行限位固定,以使安装限位件来对采像底座进行卡合限位,完成对采像组件的安装和固定,之后当需要对采像组件进行拆卸时,只需转动调节螺杆,使主动固定件向下移动,松开对中间连动件的限位,即可直接将采像组件取下,操作简单快捷,以便于可以快速对采像组件进行检修和更换。
技术特征:
1.一种基于北斗+3d高精度导航的机器人,其特征在于:包括,
2.根据权利要求1所述的基于北斗+3d高精度导航的机器人,其特征在于:所述位置推算导航单元(102)包括模拟组件(102a)和生成组件(102b),所述模拟组件(102a)包括步态计数模拟(102a-1)、智能配对单元(102a-2)和任务规划单元(102a-3);
3.根据权利要求1或2所述的基于北斗+3d高精度导航的机器人,其特征在于:所述智能终端(107)包括终端处理模块(107a)和终端成像收发模块(107b),所述终端成像收发模块(107b)包括成像分析单元(107b-1)和问题集合单元(107b-2);
4.一种摄像头安装装置,其特征在于:应用于权利要求1~3任一所述的一种基于北斗+3d高精度导航的机器人,包括机器人单元(200),所述机器人单元(200)包括机器人本体(201)和安装在机器人本体(201)上端的升降组件(202),所述机器人本体(201)的下端安装有移动组件(203);
5.根据权利要求4所述的摄像头安装装置,其特征在于:所述底座组件(301)包括底座本体(301a)和设置在底座本体(301a)内部的安装限位件(301b),且安装限位件(301b)的一端连接有中间连动件(301c),所述中间连动件(301c)的下端连接有主动固定件(301d),且主动固定件(301d)的一侧连接有调节螺杆(301e)。
6.根据权利要求5所述的摄像头安装装置,其特征在于:所述安装限位件(301b)包括限位固定结构(301b-1)和连接在限位固定结构(301b-1)下端的限位卡合结构(301b-2);
7.根据权利要求5或6所述的摄像头安装装置,其特征在于:所述中间连动件(301c)包括中间移动横板(301c-1)和连接在中间移动横板(301c-1)上端的连接立杆(301c-2),且连接立杆(301c-2)的一端连接有转动连接杆(301c-3),所述中间移动横板(301c-1)的下端连接有固定卡块结构(301c-4),且中间移动横板(301c-1)的内部安装有限位立杆(301c-5)。
8.根据权利要求7所述的摄像头安装装置,其特征在于:所述固定卡块结构(301c-4)包括固定卡块本体(301c-4a)和设置在固定卡块本体(301c-4a)内部的移动卡块(301c-4b),所述移动卡块(301c-4b)的一端连接有限位移块(301c-4c)。
9.根据权利要求8所述的摄像头安装装置,其特征在于:所述主动固定件(301d)包括固定连接移板(301d-1)和连接在固定连接移板(301d-1)两端的限位连接移板(301d-2),所述固定连接移板(301d-1)的内部设置有移动连接卡块(301d-3)。
10.根据权利要求9所述的摄像头安装装置,其特征在于:所述采像组件(302)包括采像底座(302a)和连接在采像底座(302a)上端的采像摄像头(302b)。
技术总结
本发明公开了一种基于北斗+3d高精度导航的机器人及摄像头安装装置,涉及机器人开发技术领域,包括多态导航系统,所述多态导航系统包括三维视觉联动导航单元、位置推算导航单元、智能分析系统、预处理系统、辅端衍生系统、随行成像导航单元、智能终端、数据采集端和智能处理端,机器人单元,所述机器人单元包括机器人本体和安装在机器人本体上端的升降组件;安装单元,所述安装单元包括底座组件和安装在底座组件内部的采像组件;解决了传统技术中常采用视觉中单目测距,使用单一模型导航的惯性位置推算分析数据进行导航,且利用北斗导航测量由于空间复杂性常存在误差,难以精确估计机器人的导航规划路径,导航的定位精度和可靠性较低的问题。
技术研发人员:张历,张俊杰,李鑫卓,李志强,许逵,虢韬,吕黔苏,范强,毛先胤,陈沛龙,高吉普,徐长宝,李金鑫,郑磊,王楠,罗显跃,周敬余,龙黔,张宇潇,王宇,辛明勇,肖宁,付渊,祝建杨,黄军凯,赵超,吕乾勇,刘君,李欣,付胜军,刘斌,龙秋风,古庭赟,田月炜
受保护的技术使用者:贵州电网有限责任公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!