一种整体式机器人的制作方法
本发明涉及清理机器人,特别涉及一种整体式机器人。
背景技术:
1、立筒仓是用来存储、输送及处理物料的基本设备,适用于粮食、水泥等各类散装物料。随着立筒仓中物料存储时间的增加,会有一部分物料板结在立筒仓的侧壁或者顶部。当立筒仓中的物料需要腾空清仓时,这些板结的物料无法在自身重力的作用下脱落流动到立筒仓的底部,造成了物料的损失,还会损害立筒仓内部的一些检测设备和仪器,因此需要对这些板结的物料进行清理。现有技术中出现了使用清理机器人对立筒仓进行清理的方式,一种清理机器人利用负压吸附在筒仓内壁上,当吸附面存在较多灰尘时会影响吸附的稳定性,且清理机构一般固定设置在机器人本体前方,当前方出现大块障碍时,清理机构抵触障碍,机器人不易越过障碍,使得清理机器人的可靠性较差。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种整体式机器人,解决了现有技术的清理机器人中,当吸附面存在较多灰尘时会影响吸附的稳定性,且清理机构一般固定设置在机器人本体前方,当前方出现大块障碍时,清理机构抵触障碍,机器人不易越过障碍,使得清理机器人的可靠性较差的问题。
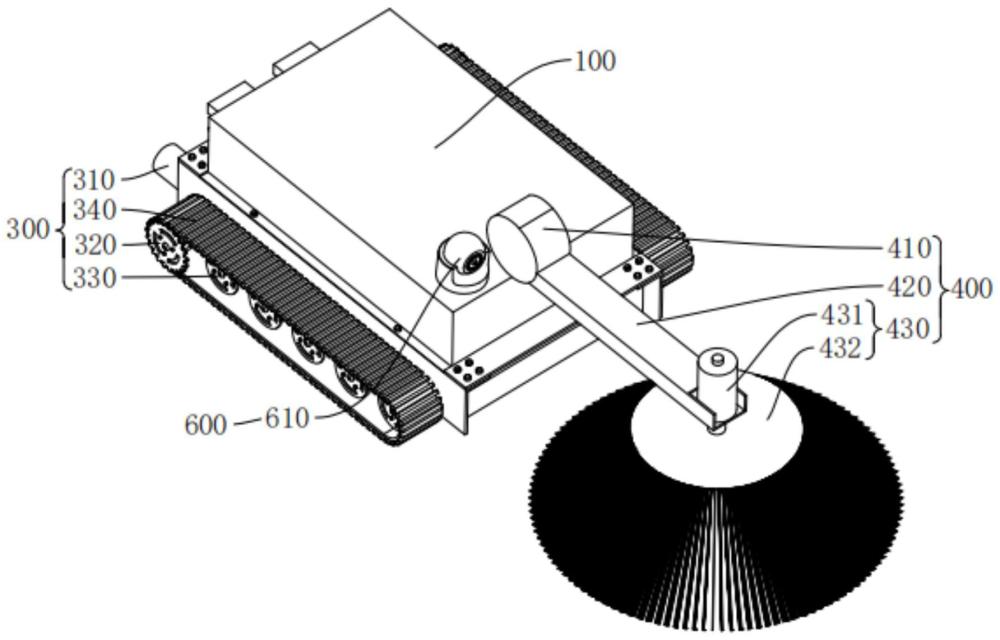
2、根据本发明实施例的一种整体式机器人,包括:
3、机器人本体;
4、负压吸附机构,安装在所述机器人本体下方,所述负压吸附机构用于产生负压将所述机器人本体吸附在待清理壁面上;
5、行走机构,安装在所述机器人本体上,所述行走机构用于带动所述机器人本体移动;
6、清理机构,包括翻转组件、清理支架和清理组件,所述翻转组件安装在所述机器人本体上,所述清理支架的一端转动连接在机器人本体上,所述清理组件安装在所述清理支架的另一端,所述清理组件用于清理待清理壁面,所述翻转组件与所述翻转支架传动连接,所述翻转组件用于带动所述清理支架转动以使所述清理组件在清理状态和收纳状态之间切换,当清理组件处于清理状态时,所述清理支架的另一端沿所述机器人本体的前进方向伸出;当所述清理组件处于收纳状态时,所述清理支架和所述清理组件位于所述机器人本体的上方。
7、根据本发明实施例的一种整体式机器人,至少具有如下有益效果:
8、设置负压吸附机构带动机器人本体吸附在待清理壁面,行走机构带动机器人本体移动;翻转组件可以带动清理支架翻转至沿机器人本体的前进方向伸出,使得清理机构处于清理状态,清理组件位于清理支架远离机器人本体的一端,进而使得清理组件可以清理所述负压吸附机构沿机器人本体前进方向的前方的壁面;清理组件能够清理板结的物料,同时能够清理前进方向的待吸附区域的灰尘,保障后续移动至待吸附区域时,减少灰尘对负压吸附机构的影响,保障负压吸附结构吸附稳定;翻转组件可以带动清理支架翻转至机器人本体上方,使得清理机构处于收纳状态,可以避免清理机构抵触前方障碍(如从筒仓底壁爬行至筒仓侧壁时),方便行走机构配合负压吸附机构攀越障碍;整体式机器人吸附稳定,兼顾越过障碍功能,行走稳定,使得整体式机器人可靠性较强。
9、根据本发明的一些实施例,所述负压吸附机构包括负压座和风机,所述负压座内设置有下端呈敞口的负压腔,所述负压座上设置有连通所述负压腔的安装孔,所述风机穿设于所述安装孔,所述风机用于将负压腔内的空气抽出使得所述负压座下端产生负压以将所述机器人本体吸附在待清理壁面上。
10、根据本发明的一些实施例,所述负压座下端边缘设置有软质围边,所述软质围边用于抵接待清理壁面时增加所述负压腔内的密封性。
11、根据本发明的一些实施例,所述整体式机器人还包括吹尘机构,所述吹尘机构包括导风座和吹气组件,所述导风座安装在所述机器人本体上,所述导风座内部设置有导风通道,所述导风座上设置有连通所述导风通道的吹气口和导风口,所述吹气口位于所述行走机构沿所述机器人本体的前进方向的前方,所述吹气组件靠近所述导风口设置,所述吹气组件用于向所述导风口吹出气体并从所述吹气口喷出。
12、根据本发明的一些实施例,所述导风座靠近所述负压座设置,所述吹气组件为所述风机。
13、根据本发明的一些实施例,所述导风通道包括相连通的进气段和出气段,所述进气段连通所述导风口,所述吹气口连通至所述出气段下端,所述出气段沿向下方向逐渐远离所述机器人本体。
14、根据本发明的一些实施例,整体式机器人还包括视觉机构,所述视觉机构包括安装在所述机器人本体上的摄像头。
15、所述摄像头安装在所述机器人本体前进方向的前端,且与所述翻转组件错开设置。
16、所述机器人本体内部设置有电路控制系统,所述电路控制系统与所述摄像头电性连接,所述电路控制系统包括控制电路板,控制电路板上设置有无线通讯模块,所述无线通讯模块与外界设备进行无线通讯。
17、所述机器人本体内部设置有电池,所述电池与所述电路控制系统电性连接。
18、所述电路控制系统与所述负压吸附机构、所述清理组件和所述翻转组件电性连接。
19、根据本发明的一些实施例,所述行走机构包括分别安装在所述机器人本体上沿所述机器人本体的宽度方向两侧的两个行走组件,所述行走组件包括行走驱动组件、驱动轮、多个从动轮和履带,所述行走驱动组件安装在所述机器人本体上,所述驱动轮与所述行走驱动组件连接,所述行走驱动组件用于带动所述驱动轮转动,多个所述从动轮转动连接在所述机器人本体上,所述履带套设在所述驱动轮和多个从动轮上。
20、根据本发明的一些实施例,所述行走驱动组件安装在所述机器人本体上沿所述机器人本体前进方向的后端。
21、根据本发明的一些实施例,所述翻转组件为翻转电机或旋转气缸。
22、根据本发明的一些实施例,所述清理组件包括清理驱动组件和清理刷,所述清理驱动组件安装在所述清理支架上远离所述机器人本体的一端,所述清理驱动组件与所述清理刷传动连接,所述清理驱动组件用于带动所述清理刷转动。
23、根据本发明的一些实施例,所述清理刷为清扫盘刷。
24、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种整体式机器人,其特征在于,包括:
2.根据权利要求1所述的一种整体式机器人,其特征在于,所述负压吸附机构包括负压座和风机,所述负压座内设置有下端呈敞口的负压腔,所述负压座上设置有连通所述负压腔的安装孔,所述风机穿设于所述安装孔,所述风机用于将负压腔内的空气抽出使得所述负压座下端产生负压以将所述机器人本体吸附在待清理壁面上。
3.根据权利要求2所述的一种整体式机器人,其特征在于,所述负压座下端边缘设置有软质围边,所述软质围边用于抵接待清理壁面时增加所述负压腔内的密封性。
4.根据权利要求2所述的一种整体式机器人,其特征在于,还包括吹尘机构,所述吹尘机构包括导风座和吹气组件,所述导风座安装在所述机器人本体上,所述导风座内部设置有导风通道,所述导风座上设置有连通所述导风通道的吹气口和导风口,所述吹气口位于所述行走机构沿所述机器人本体的前进方向的前方,所述吹气组件靠近所述导风口设置,所述吹气组件用于向所述导风口吹出气体并从所述吹气口喷出。
5.根据权利要求4所述的一种整体式机器人,其特征在于,所述导风座靠近所述负压座设置,所述吹气组件为所述风机。
6.根据权利要求4所述的一种整体式机器人,其特征在于,所述导风通道包括相连通的进气段和出气段,所述进气段连通所述导风口,所述吹气口连通至所述出气段下端,所述出气段沿向下方向逐渐远离所述机器人本体。
7.根据权利要求1所述的一种整体式机器人,其特征在于,还包括视觉机构,所述视觉机构包括安装在所述机器人本体上的摄像头。
8.根据权利要求1所述的一种整体式机器人,其特征在于,所述行走机构包括分别安装在所述机器人本体上沿所述机器人本体的宽度方向两侧的两个行走组件,所述行走组件包括行走驱动组件、驱动轮、多个从动轮和履带,所述行走驱动组件安装在所述机器人本体上,所述驱动轮与所述行走驱动组件连接,所述行走驱动组件用于带动所述驱动轮转动,多个所述从动轮转动连接在所述机器人本体上,所述履带套设在所述驱动轮和多个从动轮上。
9.根据权利要求8所述的一种整体式机器人,其特征在于,所述行走驱动组件安装在所述机器人本体上沿所述机器人本体前进方向的后端。
10.根据权利要求1所述的一种整体式机器人,其特征在于,所述清理组件包括清理驱动组件和清理刷,所述清理驱动组件安装在所述清理支架上远离所述机器人本体的一端,所述清理驱动组件与所述清理刷传动连接,所述清理驱动组件用于带动所述清理刷转动。
技术总结
本发明公开了一种整体式机器人,包括机器人本体、负压吸附机构、行走机构和清理机构,负压吸附机构用于产生负压将机器人本体吸附在待清理壁面上,行走机构用于带动机器人本体移动,清理机构包括翻转组件、清理支架和用于清理待清理壁面的清理组件,翻转组件安装在机器人本体上,清理支架的一端转动连接在机器人本体上,清理组件安装在清理支架的另一端,翻转组件用于带动清理支架转动以使清理机构在清理状态和收纳状态之间切换,清理机构处于清理状态时,清理支架的另一端沿机器人本体的前进方向伸出;当清理机构处于收纳状态时,清理支架位于机器人本体的上方。本发明的整体式机器人,负压吸附结构吸附稳定,兼顾越障功能,可靠性较强。
技术研发人员:王斌兴,陈晨,高鑫峰,张坤,蒙建良,曹毅,何玉晶,申会鹏,刘杰,吴威,许斌
受保护的技术使用者:中粮工科迎春智能装备(湖南)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!