一种箱柜锁的开锁监控方法与流程
本发明涉及一种箱柜锁的开锁监控方法。
背景技术:
1、目前市场上设计了多款带有远程遥控或者智能化自动开闭的箱柜锁。均带有各种自动开闭,自动判断误操作或者是自动排除故障等功能。然上述功能的可靠运行,均不能脱离有效的机械与电子结构设计,并且需要辅之以精妙的软件设计。
2、即使在上述有效设计的机械、电子结构的辅助下,类似的远程开启箱柜锁,仍然会由于现场各种复杂环境,导致误操作,而一旦产生误操作,往往依靠软件流程无法自动排除,导致工作失灵或者返厂维修。
3、因此现有技术中,缺乏一种可靠运行的箱柜锁监控/故障排除方法。
技术实现思路
1、为了克服上述问题或者至少部分地解决上述问题,本发明的实施例是这样实现的:一种箱柜锁的开锁监控方法,包括安装在箱体上的锁具。
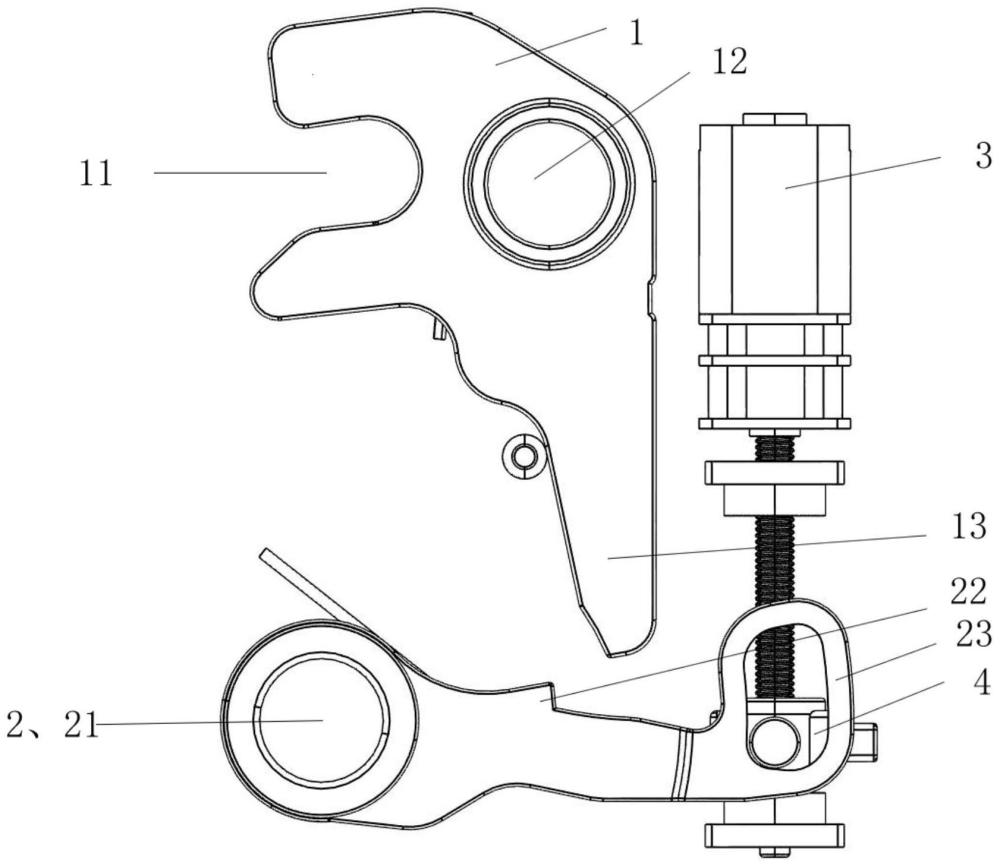
2、一种箱柜锁锁具结构,包括锁钩,转臂,滑块和带动滑块的电机、丝杠;
3、锁钩设置在锁具整体位置的中上方,锁钩中心位置设置有第一旋转轴,通过第一扭簧固定在第一旋转轴上,锁钩的左端设置有锁扣,下端设置有延伸状的第一锁止部,当第一扭簧处于自由状态时,锁扣的开口位置,朝向左上方。当锁钩在外力下逆时针转动时,第一扭簧会产生顺时针旋转的驱动力。锁扣开口方向匹配一个横杆或者其他固定物,外形需要和锁扣外形匹配。横杆可以固定在需要锁定的物体上,当锁扣开口方向向左时,则咬住横杆,锁钩处于关锁状态。当锁扣开口方向转向左上方时,则放开横杆,锁钩处于开锁状态。锁钩下部设置的第一锁止部,用来限制锁钩的旋转,当锁钩顺时针旋转时,如果第一锁止部被前方的物体挡住,锁钩就不能顺利旋转。
4、转臂设置在锁钩下方,左端设置一个第二旋转轴,利用第二扭簧将转臂固定在第二旋转轴上,当转臂处于自由状态时,第二扭簧会驱动转臂逆时针旋转直到被旋转方向上的物体挡住。这个特征,会和接下来的其他特征进行配合,以形成一些特殊的技术效果。
5、中间为转臂连接杆,在连接杆中部设置有一个顶部平滑向右延伸到连接杆中部然后向下截断形成凸起的第二锁止部。用于和第一锁止部互相接触以达到阻碍锁钩的旋转:第一锁止部触碰到第二锁止部的顶部并且从左向右移动时,可以顺利通过第二锁止部,反之则被第二锁止部卡住。由于转臂有逆时针旋转的驱动力,导致第二锁止部有向上移动的趋势。因此,当转臂未被顺时针旋转时,第二锁止部总是向上移动从而和第一锁止部互相接触,导致第一锁止部可以触碰到第二锁止部的顶部。此为将第二扭簧的驱动力设置为驱动转臂逆时针旋转的第一个原因,也是形成后续特殊产品功能的第一个关键之处。
6、电机设置在锁钩和转臂的右边,电机输出端设置有丝杠,丝杆上设置有上下移动的滑块,滑块位置设置为上中下三挡位。这3个挡位,分别匹配锁的3种状态:
7、转臂右端设置一个带中空内圈的挂钩,挂在滑块上,挂钩内圈上下端之间存在一段距离,当滑块运行到丝杆中位固定不动时,挂钩内圈可以在滑块上下移动。转臂自由状态时,转臂被第二扭簧驱动至逆时针旋转至被滑块阻挡为止,此时挂钩内圈下端与滑块接触,转臂受到顺时针驱动力时,即下文的被第一锁止部向下推压,则转臂顺时针旋转至被滑块阻挡为止,此时挂钩内圈上端与滑块接触,当第一锁止部不向下推压时,转臂又在第二扭簧作用下恢复至上述挂钩内圈下端与滑块接触的状态。于是,就形成了挂钩内圈可以在滑块上下移动的情况,从而导致转臂以第二旋转轴为旋转中心上下转动,从而带动连接杆上下移动。连接杆上下移动的距离满足当第二锁止部下降并且脱离第一锁止部时,挂钩内圈上端不会被停在中位的滑块限制住。很明显的,连接杆上下移动的距离取决于挂钩内圈上下端之间的距离。因此,挂钩设计为中空内圈,从而导致挂钩内圈可以在滑块上下移动,是形成后续特殊产品功能的第二个关键之处。
8、滑块运行到最底端时,滑块顶着挂钩内圈下端,将挂钩顶到最底部,此时转臂顺时针旋转到最底部,第二锁止部完全和第一锁止部脱离接触,导致第一锁止部(锁钩)可以正反自由旋转而不会被第二锁止部阻挡。此时锁钩(第一扭簧)处于自由状态,第一扭簧阻碍锁钩逆时针旋转,并且把锁扣顺时针旋转到第一旋转轴的左上方,此时锁扣和横杆分离,锁具处于开锁状态。
9、滑块运行到中间位置时,由于转臂有逆时针旋转的趋势,因此挂钩有向上运动的趋势,当挂钩向上运动到挂钩内圈下端被固定不动的滑块顶住时,挂钩无法继续向上运动,但是由于挂钩内圈上/下端之间存在一个距离,因此挂钩仍然可以以滑块为中心,进行上下有限距离的移动。此时转臂逆时针旋转导致第二锁止部的顶部接触到第一锁止部,所以第一锁止部在第二锁止部的顶部从左向右移动时,可以顺利通过第二锁止部,反之则被第二锁止部卡住(第二扭簧迫使转臂永远有逆时针旋转的趋势,导致第二锁止部顶部永远顶着第一锁止部,第一锁止部在第二锁止部的顶部从右向左移动时,必然被第二锁止部的凸起挡住)。即锁扣只能从左上方向向左转动(锁钩只能逆时针转动),即锁扣只能从开锁状态进入关锁,而不能反向操作。此即上文所述形成的后续特殊技术效果,即在普通锁具的开锁和关锁状态之外,另外形成一个只能继续关锁,却不能继续开锁的状态,称之为等待关锁状态。在传统需要设置等待关锁的产品中,该功能都是通过电子逻辑设置产生的。本产品独辟蹊径,采用纯机械结构的设置,导致了纯机械锁,具有等待关锁的功能。该功能的产生,则离不开上述两大技术特征的设置(上文有提),主要是设置了第二扭簧的旋转方向、和挂钩中空设置。当然第一锁止部与第二锁止部结构的巧妙配合,也是离不开的。而设置可以通过电机控制从而固定在中位的滑块,并且将挂钩挂在滑块上,则是将纯机械结构产生的等待关锁的功能,与电机的控制结合起来了。将机械机构产生的新的功能,与电子控制(电路板控制电机)统一到一个更大的功能体系(通过电路板的逻辑控制,通过电路板控制电机,从而将机械结构产生的功能纳入电路逻辑控制功能体系中)中,下文则会详细论述。
10、滑块运行到最上端时,滑块顶着挂钩内圈上端,将挂钩顶到最上部,此时转臂逆时针旋转到最上部,转臂连接杆完全将第一锁止部向上顶死,导致第一锁止部(锁钩)即使在外力的作用下,也无法顺利旋转,此时锁具处于锁死状态。
11、丝杆右边设置有一个行程开关,在与滑块上中下三个位置对应处,设置有3个检测挡位。行程开关的信号输出到控制系统中,以检测滑块是否运行到上中下三个位置处。
12、还设置有电控系统、行程开关、第一、二到位检测开关,电控系统分别连接上述部件;
13、丝杆右边设置有一个行程开关,在滑块上中下三个位置对应处,设置有3个检测挡位;
14、锁钩上设置有第一到位检测开关,箱盖上设置第二到位检测开关;
15、该锁具主要通过电机控制的滑块运行到上中下三档,通过推拉挂钩的位置,从而控制转臂运行到三个不同的位置,继而对第一锁止部(锁钩)进行三种不同方式的调节,以配合锁钩三种不同的状态。
16、开锁锁定状态,当锁钩接收到开锁指令,控制板(电控系统)驱动电机,电机移动滑块到最低位,滑块带动转臂移动到最低位,第二锁止部和第一锁止部脱离接触,锁钩在没有外力限制下,在第一扭簧的回复力驱动下,顺时针旋转,此时锁扣开口方向,从左方旋转至左上方,解除对横杆的锁定。即滑块的最低位对应于锁具的开锁状态。
17、恢复待锁状态,控制板控制电机移动滑块到中间档,此档对应锁具的待锁位置。转臂因为扭簧带动而往上转动。当锁扣开口方向,从左上方旋转左方时,此时对横杆或者其他外形可以和锁扣外形匹配的固定物进行锁定。因为上述转臂可以在滑块到达中挡位时,在滑块附近上下移动,因此第一锁止部在第二锁止部的顶部从左向右移动时,可以顺利通过第二锁止部,即此时锁钩(锁扣开口方向)从左上方旋转到左方,可以进行锁定。但是反之则被第二锁止部卡住,无法达到重新开锁的目的。即滑块的中位对应于锁具的等待关锁状态。
18、关锁状态锁定,锁扣开口方向正对左边时,控制板驱动电机移动滑块到最高档(最上方),滑块带动转臂移动到最高档,因为电机位置把滑块限制住,导致转臂无法转动。此时,转臂连接杆完全将第一锁止部向上顶死,导致第一锁止部(锁钩)即使在外力的作用下,也无法顺利旋转,此时锁具处于锁死状态。
19、滑块通过上中下三个挡位,对应于锁具的三种状态。主要是挂钩和第二锁止部的配合。挂钩是长圆形,内部具有一定的距离,可以滑块为中心上下移动。而且挂钩内部的距离又不至于过大,而导致滑块上下移动时,挂钩不随着移动。从而导致了,滑块移动到高位时,挂钩跟着移动到高位,对锁钩进行锁定。滑块移动到低位时,挂钩移动到低位,对锁钩彻底放开限制。滑块移动到中心位置时,挂钩可以在滑块附近上下移动。而第二锁止部的结构,也导致了第一锁止部从左向右的移动不会产生阻碍,反之则被第二锁止部卡住。
20、上述电控系统连接传感器、电机以后,产生了智能控制机械传动的效果。具体如下:
21、当启动防止误关锁(开锁监控)指令时,如果电控系统根据行程开关检测到滑块处于中间位置,则判断此时锁具处于待锁状态(即上述3个状态中,下一步只能是继续关锁——这种状态,是在嵌入式系统中“电控系统”中人为标定的一种逻辑状态,其对应的,是上述机械允许原理中的3种状态的划分。),如果此时第一到位检测开关检测到位,说明锁钩进入锁定状态(参考上述锁钩锁扣的角度,即附图1中,锁扣开口位置正对左边,此种状态,在现有技术中,运用一个到位检测器/传感器,即可轻松检测。)则此时检测第二到位检测开关是否到位,如果未到位,则判断箱盖未合上(原理如上,到位检测开关判断2个物体之间的距离是否符合电控系统/单片机中事先设定好的距离,均属现有技术),则判断锁钩是被误触碰。箱盖未关上,而锁具已经锁定,则系统判定为误关锁——从上述锁具的第2个状态的详细描述,可以知道,在滑块处于中间位置时,锁钩只能人为逆时针转动——第一扭簧做了限制,当锁扣开口方向已经是朝向左上方时“附图2中的左上方45度”时,从结构上对继续顺时针扭转做了限制——扭簧制造为向逆时针旋转受回旋力,向另一个方向“即附图2中的左上方45度继续顺时针扭转时”,在锁钩附近的附属结构上、扭簧的弹簧绕圈方向上,均做了限位,导致在附图2的基础上,无法继续人为顺时针扭转,只能人为逆时针转动。而上述第2状态的详细描述中,已经知道,当滑块处于中间位置时,即锁具处于待锁状态时,一旦锁钩逆时针旋转(无论是否属于人为的误操作),均会导致锁具处于锁定状态,其均不能通过单纯的扭转锁钩而解锁,原理上面已经说清楚了。因此,当电控系统判断在锁具待锁阶段出现人为误操作导致锁具被误锁定后,需要通过电机进行自动解锁。其具体过程是,电控系统控制电机将滑块运行到最低位,此时锁钩在第一扭簧作用下把锁扣顺时针旋转到第一旋转轴的左上方(原理上述第2状态中有详细描述),即实现自动开锁效果,然后电控系统控制电机将滑块重新恢复到中间位置,继续等待关锁命令。此则完成一个完整的防止误关锁命令。
22、进一步的,此种防止误关锁命令,还可以嵌入开关锁的方法中进行使用。如某种开锁方法,初始状态为默认箱体处于开锁状态(即箱盖、锁具均处于打开状态),正在等待关锁指令,包括如下步骤:
23、步骤1,电控系统根据行程开关将滑块移动到中间位置,通过第二、第一到位检测开关,检测箱盖是否关闭,锁具是否关闭;
24、如箱盖已关闭,则提示异常;
25、如箱盖未关闭,则进一步检测锁具是否关闭:
26、如锁具未关闭,则判断可以进一步接受关锁指令;
27、如锁具关闭,则提示异常。
28、这种情况,则很明显的,箱体锁具出现了误关锁现象。锁具在等待关闭时,会出现被误操作而直接变成关闭的情况——很多锁具的操作是不需要钥匙的,是通过锁舌/钩的触发来达到关闭目的,而锁舌/钩又特别灵活,轻微的触动,就可以使锁具从打开变成关闭,从而导致了大量误操作的情况。比如小孩子碰一下,或者小动物碰一下,或者箱盖被风吹动,靠近/触碰锁舌/钩,导致锁舌/钩关闭。此时就需要在传统的开箱/锁判断过程中,附加一个锁具/舌的检测功能,判断在等待关锁的过程中,锁具/舌是否处于打开状态,如果处于打开状态(第一到位检测开关),才能顺利的等待关锁的指令。如果已经处于关闭状态(人为,机械故障导致的),则对外报警为误操作。由于电控系统中存在“误关锁命令”,此时上述命令自动执行,自然会消除上述“异常”情况。
29、步骤2,如收到电控系统的关锁指令,则执行关锁指令,待电控系统将锁具关闭后,通过第一到位检测开关,检测锁具是否顺利关闭;
30、如锁具未正常关闭,则提示关箱失败;
31、如果锁具顺利关闭,则将关锁信息反馈至电控系统,电控系统根据行程开关将滑块移动到最上位置,将锁具状态固定在锁定状态;
32、智能锁和远程控制锁(均带电控系统)的缺点之一,就是会出现程序中已经确认是关锁,而现实中,因为人为、机械故障、环境的原因,导致锁具并未被关闭。这种情况如果不及时排除,轻则会影响箱体的下一步使用(比如下一步工作指令由于锁具并未被顺利关闭而导致无法进行),严重的会导致财务损失(如系统认为锁已经关闭,而实际锁未关闭,运输过程中导致箱内物体翻滚到箱外,活体动物自动跑到箱外,快递柜、自动贩卖机因为实际未关锁而导致货物处于未受管控状态而导致损失)。
33、步骤3,收到开锁指令,则电控系统控制开锁,控制开锁的方法如上,第一到位检测开关检测锁具是否顺利打开(原理如上),如未打开,则提示开箱失败;如锁具顺利打开,则第二到位检测开关继续检测箱盖是否打开,如果箱盖未能顺利打开,则程序不断重复判断箱盖是否打开且对外提示箱盖未打开,等待箱盖被打开,如箱盖打开,电控系统根据行程开关将滑块移动到中间位置,并且等待新的关锁指令,即回到程序步骤1。
34、需要检查箱盖是否打开的原因如上,也是为了防止程序或者远程控制中心认为箱盖已经打开了,但是因为上述原因,箱盖并未打开,此时如果不单独对箱盖进行检测并且处理,则会出现程序默认的下一步执行和现场实际执行情况互相矛盾。
35、单纯的设置一个误关锁流程,或者在任何一个包含电控系统的远程或者智能开锁方法中,嵌入一个误关锁流程,都是具有现实意义的。
- 还没有人留言评论。精彩留言会获得点赞!