一种隧道智能巡检机器人定位装置及方法与流程
本发明涉及一种隧道机器人定位装置及方法,特别是公开一种挂轨式多模块结合的隧道智能巡检机器人定位装置及方法,应用于隧道检测领域。
背景技术:
1、随着国内隧道运营规模剧增和机器人技术的快速发展,机器人越来越多地应用于隧道、地下管廊等无人值守的基础设施快速检测领域,其中机器人运动中精准定位是关键技术之一。
2、随着计算机技术、运动控制等技术的不断发展,出现了不少隧道轨道机器人定位装置与方法。专利cn201520326405.4公开了一种基于光纤传感器的轨道机器人行走定位装置,利用伺服驱动器控制车轮旋转角度,将读取到的角度值与计算机内存储的定位孔位置信息进行对比,获取机器人的精确位置;专利cn201921399769.x公开了一种用于轨道机器人的悬挂式运动装置,利用两组挂载驱动机构实现移动,两组快拆挂载机构便于拆装、运输和维修,自适应导向压紧机构对轨道侧面的两处施加一定压力的滚动接触,解决了轨道机器人转弯半径大,维护不易的问题;专利cn202211579279.4公开了一种隧道机器人定位方法、系统、设备和存储介质,通过rfid识别系统获取隧道机器人对应的当前位置信息。目前已有的隧道机器设备快速定位技术多采用单一的定位方式,定位精确度较低,难以满足长距离移动的精准寻址需求。
3、综上,迫切需要一种适合长距离移动、多模块结合运行的隧道智能巡检机器人高精度定位装置及方法。
技术实现思路
1、本发明的目的是设计一种隧道智能巡检机器人定位装置及方法,主要解决现有巡检机器人长距离移动定位方式单一、定位精度低的技术问题。
2、本发明的目的可以通过以下技术方案来实现:一种隧道智能巡检机器人定位装置,由控制器、执行模块和反馈模块组成;控制器直接控制执行模块的行为,反馈模块监测机器人的实时位置并反馈给控制器,控制器接收和分析反馈模块的数据以校准对执行模块的控制。
3、所述控制器为可编程逻辑控制器,内置算法模块,进行接收与分析位置数据、发送目标位置的位置脉冲数工作,实现机器人运动和确定其实时位置过程中数据高效处理和智能决策;
4、所述执行模块由驱动器和电机组成,驱动器包括位置驱动器、速度驱动器和电流驱动器;驱动器用于接收控制器发送的运行指令,解码后发送至电机,并驱动电机运行,实现机器人运动并确定其实时位置;
5、所述反馈模块由编码器定位装置系统和rfid识别系统两部分组成;
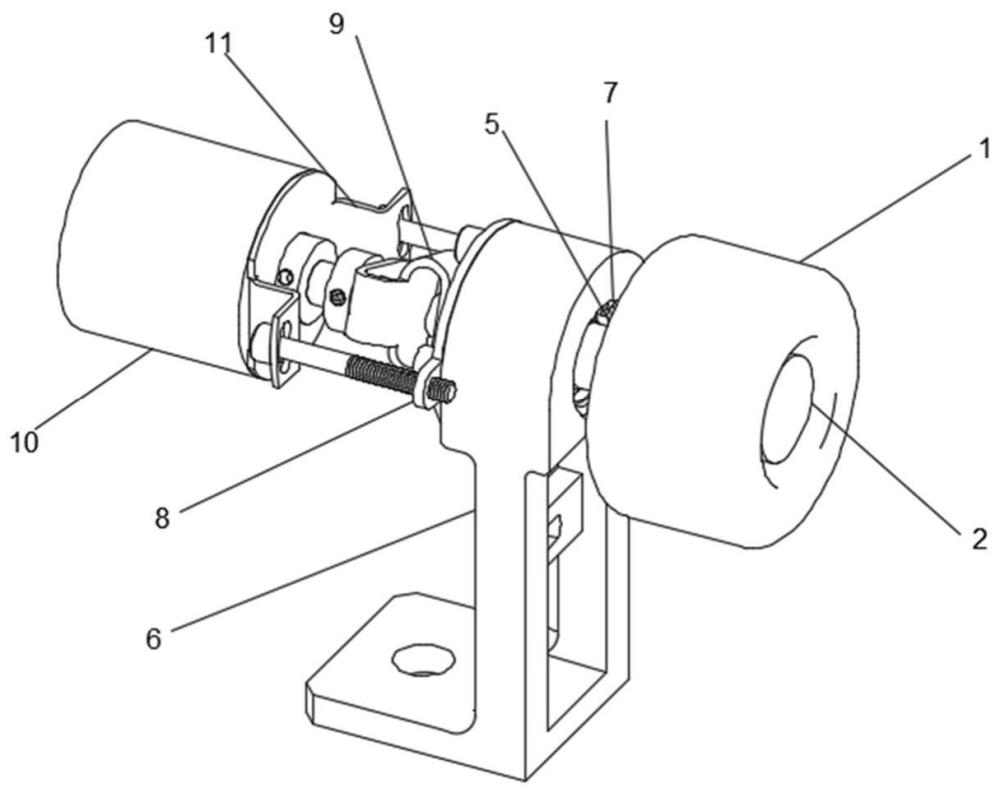
6、所述编码器定位装置系统包括计步轮、计步轮底座、安装板、连接轴、键、轴承、轴用卡簧、孔用卡簧、柔性联轴器、编码器、编码器柔性支架;计步轮与连接轴通过键连接,由轴用卡簧进行轴向定位,两个轴承安装于计步轮底座中,外侧使用孔用卡簧轴向定位,连接轴穿过轴承装入计步轮底座中,安装板通过螺丝固定于计步轮底座,柔性联轴一端通过顶丝与连接轴连接,另一端通过顶丝与编码器连接,编码器安装在编码器柔性支架上,计步轮随机器人移动而旋转,通过连接轴与柔性联轴器传动,最终传递到编码器,编码器发出信号到机器人控制系统,经解码,获取机器人移动位置;编码器定位装置通过计步轮支架与小车主体相连,编码器定位装置可实时反馈机器人在移动时的实时位置;
7、所述rfid识别系统由读卡器和多个电子标签组成,读卡器通过螺栓安装固定在机器人上部,电子标签依据实际里程安装在轨道的不同位置,且电子标签具有唯一的编号,对应相应的里程数,在机器人移动时,读卡器读取电子标签上的编号,由控制器解码,获取机器人的实时位置;
8、所述隧道智能巡检机器人的定位方法包括目标定位法和回原点定位法,其中目标定位法用于机器人行驶过程中的定位方法,回原点定位法用于机器人处于原点之外任意位置回到唯一原点的运行方法;
9、所述目标定位法分为两种模式:
10、(1)编码器定位模式:控制器根据内置算法计算目标位置的位置脉冲数,并将其发送给驱动器,驱动器自动解析位置脉冲数,引导电机执行相应的位置操作,此过程中编码器会实时返回位置数据给控制器,控制器分析编码器返回的位置数据以修正机器人的实时位置,并更新记录当前位置信息;
11、(2)rfid识别定位模式:系统预先写入运行轨道中所有目标点的rfid标签信息,在机器人行驶过程中,经过标有rfid标签的目标点时,机器人可自动读取该标签的位置信息,并修正当前位置为标签位置,修正后,系统更新当前位置信息为标签位置,并使用修正后的位置作为后续目标位置的参考;
12、所述rfid识别定位模式的优先级高于所述编码器定位模式;
13、所述回原点定位法,机器人通过原点传感器进行信号检测,分为引导、寻位、补偿三个阶段,具体操作如下:
14、(1)引导阶段:机器人处于原点之外任意位置,控制器收到回原点指令后,接收编码器传递的位置信息,获取机器人的实时位置;
15、进一步,控制器分析位置数据,发送方向信号脉冲及位置脉冲列至驱动器;
16、进一步,驱动器引导机器人从静止开始以正向加速度a1加速至v1,如公式(1)所示;
17、v1=a1t1#(1)
18、其中,v1-机器人引导阶段速度,a1-引导阶段正向加速度,t1-加速所用时间;
19、所述正向为机器人首次向原点运动的方向;
20、进一步,机器人以匀速速度v1驶向原点,完成引导过程,机器人相对于初始位置的实时位置如公式(2)所示;
21、
22、其中,t1-引导阶段时间变量,x1(t1)-引导阶段机器人相对于初始位置的实时位置;
23、(2)寻位阶段:机器人经过原点且检测到原点传感器信号,系统启动区间限制以检测机器人是否驶离该范围;
24、所述区间限制为用户设定的传感器正负d的感应范围;
25、进一步,机器人以反向加速度-a2使速度从v1减至0,如公式(3)所示,此时机器人处于越过原点的位置;
26、0=v1-a2t2#(3)
27、其中,-a2-寻位阶段减速的反向加速度,t2-减速所用时间;
28、所述反向为机器人首次向原点运动的反方向;
29、进一步,机器人以反向加速度-a3加速至v2,如公式(4)所示;
30、v2=-a3t3#(4)
31、其中,v2-机器人寻位阶段速度,-a3-寻位阶段加速的反向加速度,t3-加速所用时间;
32、进一步,机器人以匀速速度v2驶向原点,完成寻位过程,机器人相对于原点的实时位置x2(t2)如公式(5)所示;
33、
34、其中,t2-寻位阶段时间变量,x2(t2)-寻位阶段机器人相对于原点的实时位置;
35、(3)补偿阶段:机器人第二次经过原点传感器时,以正向加速度a4减速至0,如公式(6)所示,此时机器人处于原点与初始位置之间;
36、0=v2-a4t4#(6)
37、其中,a4-寻位阶段减速的正向加速度,t4-减速所用时间;
38、进一步,机器人以正向加速度a5加速至v3进行偏离补偿,如公式(7)所示;
39、进一步,机器人匀速驶向原点,直至第三次经过原点传感器,机器人减速至静止,完成补偿过程;
40、v3=a5t5#(7)
41、其中,v3-机器人补偿阶段速度,a5-加速阶段的正向加速度,t5-加速所用时间;
42、所述回原点定位法的过程中,若机器人移动超出了所述区间限制范围,控制器发出纠正信号,引导机器人重新寻找原点位置,该区间限制可有效防止机器人在回原点的过程中偏离目标位置,进而提高回原点定位法的精确度和可靠性。
43、本发明的有益效果是:
44、(1)本发明是一种隧道长距离智能巡检机器人定位装置及方法,可用于长距离的隧道巡检,发明结合了编码器定位装置和rfid识别系统方法,定位方式多样化,减少单一定位方式的不稳定性,提高机器人定位精度。
45、(2)本发明可实现机器人移动过程中的实时定位,以及在任意位置快速、精确返回原点的操作,提升检测作业的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!