一种可变形可组合轮腿式机器人及其方法
本发明涉及机器人及自动控制,特别是涉及一种可变形可组合轮腿式机器人。
背景技术:
0、技术背景
1、在各类地面移动机器人中,轮腿机器人因其独特的运动模式而得到广泛关注。与其他轮式机器人相比,轮腿式机器人可以在保持平衡性和稳定性的同时,完成更加复杂的机动动作。但轮腿式机器人在平稳运动时存在运动慢、载重小的缺点。
2、现有的大部分轮式机器人几乎难以实现在复杂地形的作业,轮腿式机器人虽然可以解决这些应用场景的问题,但是由于轮腿式机器人本身在平稳运动时难以实现快速移动并且负载较低,这使得轮腿式机器人在其工作场景的能力受到较大限制。
技术实现思路
1、本发明的目的是提供一种可变形可组合轮腿式机器人,以解决上述现有技术存在的问题,使得轮腿式机器人拥有更快机动能力和更高的负重能力。
2、为实现上述目的,本发明提供了如下方案:
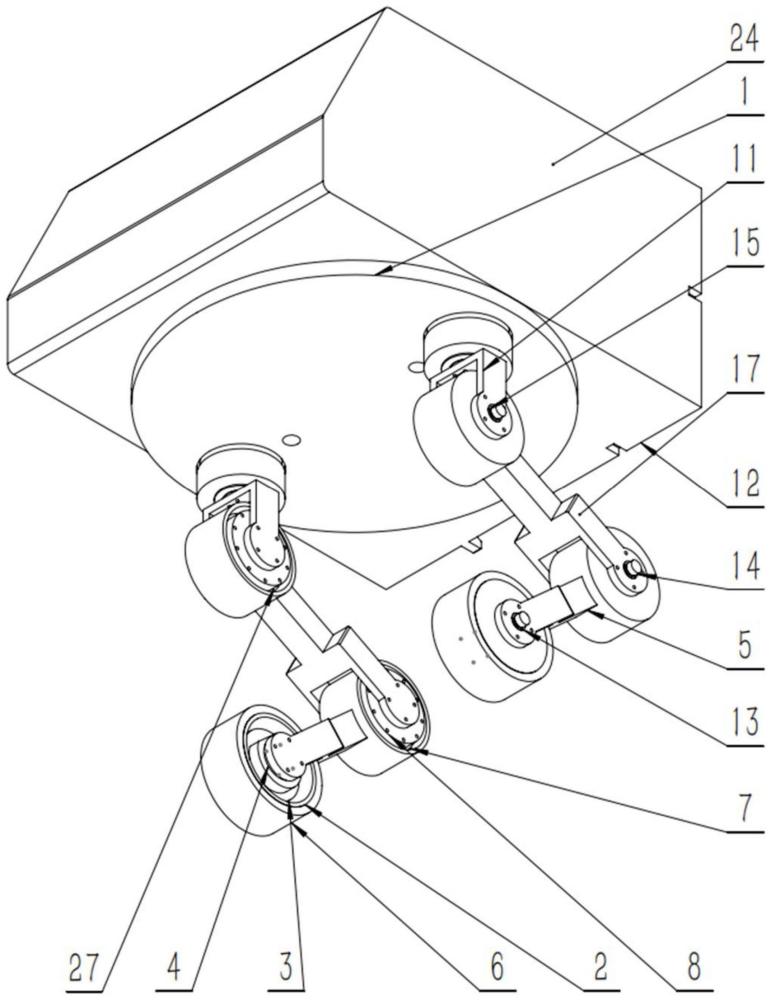
3、一种可变形可组合轮腿式机器人,包括头部电控箱、位于头部电控箱底部的旋转底盘、以及安装在旋转底盘左右两侧的一对行走组件,所述的一对行走组件在朝着前进方向行进过程中能够在左右分布和前后分布之间进行切换,且切换过程中行走组件末端的轮子始终朝向前进方向;
4、所述的行走组件包括肩关节、腿部组件和轮子,所述的肩关节前端通过肩关节旋转电机安装在旋转底盘的底面,肩关节后端通过髋关节旋转电机与腿部组件前端连接,腿部组件后端通过轮子电机与轮子连接。
5、进一步地,所述的腿部组件包括上腿部、下腿部、以及连接上腿部后端和下腿部前端的膝关节旋转电机,所述的上腿部前端通过髋关节旋转电机连接肩关节后端,下腿部后端通过轮子电机连接轮子。
6、进一步地,所述的肩关节旋转电机的旋转轴垂直向下,所述的肩关节前端与肩关节旋转电机的旋转轴配合安装,肩关节能够在肩关节旋转电机的带动下在水平面上转动;髋关节旋转电机、膝关节旋转电机和轮子电机的旋转轴呈水平方向且互相平行,分别带动上腿部、下腿部和轮子前后摆动以调整角度。
7、进一步地,所述的肩关节后端、上腿部后端、下腿部后端均采用连接叉结构,上腿部前端、下腿部前端、轮子分别置于肩关节、上腿部、下腿部的叉体内,髋关节旋转电机、膝关节旋转电机和轮子电机分别安装在上腿部前端、下腿部前端、轮子的内部。
8、进一步地,所述的上腿部前端、下腿部前端、轮子设有含圆柱形腔室的外壳,外壳一侧面设有安装孔和散热孔,另一侧面敞开;外壳内安装相对应的电机,电机的旋转轴与外壳一侧面的内侧固定,外壳一侧面的外侧与叉体的开孔一侧通过法兰轴承连接,电机的固定端通过垫片结构与叉体的未开孔一侧固定;所述外壳能够在电机的带动下前后摆动以调整角度。
9、进一步地,所述的轮子外圈包覆有轮子包胶。
10、进一步地,所述的旋转底盘通过导电滑环安装在头部电控箱底部,所述的导电滑环通过增高固定件加固。
11、进一步地,所述的头部电控箱为顶部开口的箱体结构,箱体内设有机载电脑和供电装置,所述的机载电脑接入机器人的惯性传感器数据,两台机载电脑之间能够通讯;箱体后板上侧开槽,槽内安装有摄像头;箱体后板设有连接组件,一对机器人能够通过连接组件背靠背组合。
12、进一步地,所述的连接组件包括由卡扣、卡槽组成的第一连接组件和由凸球缺、凹球缺组成的第二连接组件,当一对机器人背靠背时,卡扣与卡槽的位置一一对应,凸球缺与凹球缺的位置一一对应。
13、上述可变形可组合轮腿式机器人的变形和组合方法,包括:
14、低速、复杂场景下,机器人采用轮腿模式前进,一对行走组件位于头部电控箱下方左右两侧,通过旋转髋关节旋转电机和膝关节旋转电机调整腿长,实现主动悬挂以保持平衡移动,肩关节旋转电机保持锁死状态;机器人向前倾时,轮子电机向前加速,机器人向后倾时,轮子电机向后加速;
15、高速、简单场景下,机器人采用自平衡车模式前进,切换过程为:行进过程中,髋关节旋转电机和膝关节旋转电机旋转,将腿长调整至最长,待行走组件为直立状态时,将髋关节旋转电机与膝关节旋转电机旋转位置锁死,两个轮子电机差速旋转,同时左右肩关节旋转电机配合旋转,将一对行走组件从左右分布逐渐调整至前后分布,整个调整过程中,一对轮子始终朝前进方向转动;完成前后分布调整后,继续通过旋转髋关节旋转电机和膝关节旋转电机调整腿长,降低机器人重心,最终以平衡自行车形态实现快速机动;
16、应对各场景下的高负载任务时,两台机器人以“背对背”的形式同向运动,运行在前方的主机器人发布组合的指令并平稳运行,运行在后方的副机器人通过摄像头稳速靠近主机器人,并调整姿态使得自身连接组件与主机器人的连接组件同步对接,实现背靠背组合,增加纵向承重量。
17、本发明公开以下技术效果:
18、(1)本发明能够实现轮腿式机器人与平衡自行车行进间切换,将轮腿式机器人室内复杂地形机动性与平衡自行车运动快速性和低能耗有机结合。
19、(2)本发明通过机器人两个肩关节旋转电机和两个轮子电机配合运动实现机器人从轮腿式形态转为平衡自行车形态的过程平衡控制。
20、(3)本发明通过机器人背后的连接组件结构可实现双轮腿式机器人“背对背”方式的组合变形,实现四足轮腿式机器人形态有效提高机器人负载能力。
技术特征:
1.一种可变形可组合轮腿式机器人,其特征在于,包括头部电控箱(12)、位于头部电控箱底部的旋转底盘(1)、以及安装在旋转底盘(1)左右两侧的一对行走组件(17),所述的一对行走组件(17)在朝着前进方向行进过程中能够在左右分布和前后分布之间进行切换,且切换过程中行走组件(17)末端的轮子始终朝向前进方向;
2.根据权利要求1所述的可变形可组合轮腿式机器人,其特征在于,所述的腿部组件包括上腿部、下腿部、以及连接上腿部后端和下腿部前端的膝关节旋转电机(7),所述的上腿部前端通过髋关节旋转电机(27)连接肩关节(11)后端,下腿部后端通过轮子电机(3)连接轮子(2)。
3.根据权利要求2所述的可变形可组合轮腿式机器人,其特征在于,所述的肩关节旋转电机(10)的旋转轴垂直向下,所述的肩关节(11)前端与肩关节旋转电机(10)的旋转轴配合安装,肩关节(11)能够在肩关节旋转电机(10)的带动下在水平面上转动;髋关节旋转电机(27)、膝关节旋转电机(7)和轮子电机(3)的旋转轴呈水平方向且互相平行,分别带动上腿部、下腿部和轮子前后摆动以调整角度。
4.根据权利要求2所述的可变形可组合轮腿式机器人,其特征在于,所述的肩关节(11)后端、上腿部后端、下腿部后端均采用连接叉结构,上腿部前端、下腿部前端、轮子分别置于肩关节、上腿部、下腿部的叉体内,髋关节旋转电机(27)、膝关节旋转电机(7)和轮子电机(3)分别安装在上腿部前端、下腿部前端、轮子的内部。
5.根据权利要求4所述的可变形可组合轮腿式机器人,其特征在于,所述的上腿部前端、下腿部前端、轮子设有含圆柱形腔室的外壳,外壳一侧面设有安装孔和散热孔,另一侧面敞开;外壳内安装相对应的电机,电机的旋转轴与外壳一侧面的内侧固定,外壳一侧面的外侧与叉体的开孔一侧通过法兰轴承连接,电机的固定端通过垫片结构与叉体的未开孔一侧固定;所述外壳能够在电机的带动下前后摆动以调整角度。
6.根据权利要求1所述的可变形可组合轮腿式机器人,其特征在于,所述的轮子(2)外圈包覆有轮子包胶(6)。
7.根据权利要求1所述的可变形可组合轮腿式机器人,其特征在于,所述的旋转底盘(1)通过导电滑环(25)安装在头部电控箱(12)底部,所述的导电滑环(25)通过增高固定件(26)加固。
8.根据权利要求2所述的可变形可组合轮腿式机器人,其特征在于,所述的头部电控箱(12)为顶部开口的箱体结构,箱体内设有机载电脑和供电装置,所述的机载电脑接入机器人的惯性传感器数据,两台机载电脑之间能够通讯;箱体后板上侧开槽,槽内安装有摄像头(20);箱体后板设有连接组件,一对机器人能够通过连接组件背靠背组合。
9.根据权利要求8所述的可变形可组合轮腿式机器人,其特征在于,所述的连接组件包括由卡扣(22)、卡槽(21)组成的第一连接组件和由凸球缺(18)、凹球缺(19)组成的第二连接组件,当一对机器人背靠背时,卡扣与卡槽的位置一一对应,凸球缺与凹球缺的位置一一对应。
10.权利要求8所述的可变形可组合轮腿式机器人的变形和组合方法,其特征在于,包括:
技术总结
本发明提供一种可变形可组合轮腿式机器人及其方法,属于机器人及自动控制技术领域。包括头部电控箱、位于头部电控箱底部的旋转底盘、以及安装在旋转底盘左右两侧的一对行走组件,一对行走组件在朝着前进方向行进过程中能够在左右分布和前后分布之间进行切换,且切换过程中行走组件末端的轮子始终朝向前进方向;行走组件包括肩关节、腿部组件和轮子,肩关节前端通过肩关节旋转电机安装在旋转底盘的底面,肩关节后端通过髋关节旋转电机与腿部组件前端连接,腿部组件后端通过轮子电机与轮子连接。本发明通过肩关节旋转电机、轮子电机之间的配合运动实现机器人从轮腿式形态转为平衡自行车形态,还可实现双轮腿式机器人“背对背”方式的组合变形。
技术研发人员:李博,方磊磊,李可为,骆佳烨,何宇航,于爱华
受保护的技术使用者:浙江科技学院
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!