一种臂架类机场消防车智能控制方法及系统与流程
本发明属于消防救援装备领域,具体涉及一种臂架类机场消防车智能控制方法及系统。
背景技术:
1、机场消防救援车辆需要快速响应飞机救援需求,因此高效便捷的智能化电控系统将极大地提升机场消防救援车辆的救援效率。特别是臂架类带穿刺针功能的机场消防车,其主要救援工况既要抵近被救援飞机时要进行喷射消防灭火介质,又要完成刺针刺穿飞机蒙皮,进而完成飞机内部着火点的救援。因此需要操作人员既要完成消防灭火系统的操控,又要避免臂架与被救援飞机机身产生碰撞。在紧张的救援环境中,往往使操作人员体力、精力消耗过大,并且操作不当也对救援效率产生较大影响。
2、虽然现有技术中也设计有带臂架穿刺针功能的机场消防救援车,但其控制系统仅是完成了臂架或穿刺针位置运动控制并提供了三种典型工况位置的自动运动控制以及提供限幅和车身区域保护;这是臂架类消防车的基本控制策略与保护功能。但受本专利机场消防车穿刺针机构限制,穿刺针与臂架伸出方向水平相同,
3、在实际救援过程中,操作人员受救援环境因素的影响,在操控使用臂架或穿刺针进行救援时,极易产生穿刺针与地面或被救援飞机碰撞。操作人员不仅要观察火源和臂架状态,还要时时观察穿刺针与地面或被救援飞机的空间距离,对操作人员的操控水平要求较高,精力消耗巨大,稍有不慎都将延误救援。
技术实现思路
1、发明目的:为了克服现有技术中的不足,本发明提供一种臂架类机场消防车智能控制方法及系统,通过本发明的方法和系统能够在实际救援过程中实时监控穿刺针机构在随臂架系统运动的空间状态,以及结合待救援飞机的位置数据灵活性调整作业模式激活相应的安全策略,避免产生穿刺针与地面或被救援飞机碰撞技术问题,在相应的安全保护策略下实现穿刺针的救援工况自动到位控制,达到简化机场消防车穿刺针机构操控工序的目的。
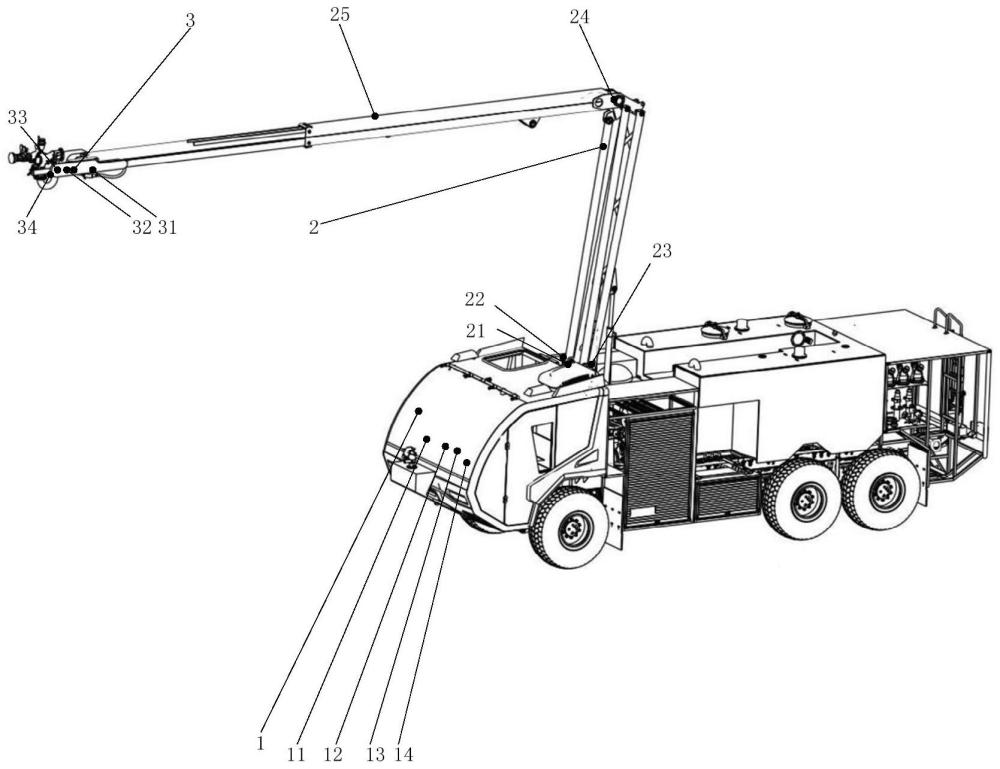
2、技术方案:第一方面本发明提供一种臂架类机场消防车智能控制系统,包括:
3、操控手柄、控制器、显示器、总线操控按键、电磁比例阀组、臂架电控子系统、穿刺针电控子系统;
4、其中,所述操控手柄用于手动控制臂架、水炮和穿刺针的角度调节;
5、所述显示器用于可视化输出报警信息;
6、所述总线操控按键用于手动选取工况位置模式与穿刺作业;
7、所述电磁比例阀组分别用于与臂架、穿刺针机构中的各执行机构连接;
8、所述控制器分别与操控手柄、显示器、总线操控按键、电磁比例阀、臂架电控子系统、穿刺针电控子系统电联,用于接收臂架电控子系统、穿刺针电控子系统的实时数据、操控手柄和总线操控按键的控制数据,以及向电磁比例阀组发送控制指令,向显示器输出报警信息。
9、在进一步的实施例中,所述臂架电控子系统包括:分别安装在臂架上的转台角度传感器、臂架托臂支架检测传感器、臂架基本臂角度传感器、臂架伸缩臂角度传感器、臂架伸缩臂长度传感器、液压油缸压力传感器;
10、所述转台角度传感器用于实时获取臂架旋转角度;
11、所述臂架托臂支架检测传感器用于实时检测臂架是否脱离托臂支架;
12、所述臂架基本臂角度传感器用于实时获取臂架基本臂与水平面夹角;
13、所述臂架伸缩臂角度传感器用于臂架伸缩臂与基本臂之间的夹角值;
14、所述臂架伸缩臂长度传感器用于实时获取臂架伸缩臂伸出长度值;
15、所述液压油缸压力传感器用于实时获取液压油缸压力数据。
16、在进一步的实施例中,所述穿刺针电控子系统包括:分别安装在穿刺针上的角度传感器、位置传感器、监控设备、测距雷达;
17、所述角度传感器用于实时获取穿刺针相对水平面的角度;
18、所述位置传感器用于实时获取穿刺针状态位置;
19、所述监控设备用于实时获取穿刺针使用状态的视频数据;
20、所述测距雷达用于实时获取穿刺臂头与飞机间距离的测量数据。
21、第二方面本发明提供一种臂架类机场消防车智能控制方法,包括:
22、分别获取臂架电控子系统实时数据、穿刺针电控子系统实时数据以及液压油缸压力数据;
23、根据臂架电控子系统实时数据、穿刺针电控子系统实时数据以及液压油缸压力数据生成穿刺针随臂架系统运动的空间状态;
24、基于穿刺针随臂架系统运动的空间状态,确定臂架系统运动满足安全保护策略及判断是否达到目标空间位置;
25、在臂架系统运动不满足安全保护策略时,触发停止各比例阀动作,同时输出报警信息用于提示操作员;
26、在臂架系统运动满足安全保护策略下触发各比例阀动作,控制各执行机构动作更新穿刺针随臂架系统运动的空间状态;或在臂架系统运动未达到目标空间位置前,修正穿刺针与臂架系统各比例电磁阀的电流、得电时间,触发各比例阀动作,控制各执行机构动作更新穿刺针随臂架系统运动的空间状态;
27、在臂架系统运动达到目标空间位置时,检测穿刺针状态,确定穿刺针弹射或输出报警信息,用于提醒操作员输入相关控制数据,达到简化机场消防车穿刺针机构操控工序的目的。
28、在进一步的实施例中,分别获取臂架电控子系统实时数据、穿刺针电控子系统实时数据以及液压油缸压力数据还包括:
29、消防系统通电后先分别获取臂架电控子系统、穿刺针电控子系统的硬件自检数据;
30、根据硬件自检数据确定是否通过显示器输出故障报警信息;
31、基于显示器输出的故障报警信息用于提示操控人员及时排查故障。
32、在无故障报警信息输出时,分别获取转台旋转角度数据、基本臂变幅角度数据、伸缩臂变幅角度数据、伸缩臂伸缩数据、穿刺针机构角度数据、液压油缸压力数据。
33、在进一步的实施例中,根据臂架电控子系统实时数据、穿刺针电控子系统实时数据以及液压油缸压力数据生成穿刺针随臂架系统运动的空间状态还包括分别接收总线操控按键及操控手柄的控制数据,并根据总线操控按键及操控手柄的控制数据调整穿刺针随臂架系统运动的空间状态。
34、在进一步的实施例中,根据总线操控按键及操控手柄的控制数据调整穿刺针随臂架系统运动的空间状态的方法包括:
35、根据操控手柄的控制数据进行臂架、水炮和穿刺针姿态位移的控制,调整穿刺针随臂架系统运动的空间状态;
36、根据总线操控按键的控制数据,调整穿刺针随臂架系统运动的空间状态。
37、在进一步的实施例中,根据总线操控按键的控制数据,调整穿刺针随臂架系统运动的空间状态的方法包括:
38、根据总线操控按键的控制数据,选取作业模式;
39、根据作业模式,标定穿刺针的空间位置并计算,获得臂架系统的运动轨迹;
40、根据臂架系统的运动轨迹,分别计算出穿刺针与臂架系统各比例电磁阀的电流、得电时间、及控制顺序;
41、根据出穿刺针与臂架系统各比例电磁阀的电流、得电时间、及控制顺序触发各比例阀动作,控制各执行机构动作调整穿刺针随臂架系统运动的空间状态。
42、在进一步的实施例中,根据总线操控按键及操控手柄的控制数据还包括:
43、在总线操控按键不同的作业模式下激活不同的安全保护策略,以及操控手柄同步激活相应的安全保护策略,其中,安全保护策略为穿刺针防碰撞的作业范围,不同的工况对应不同的作业范围边界。
44、在进一步的实施例中,基于穿刺针随臂架系统运动的空间状态,确定臂架系统运动满足安全保护策略的方法包括:
45、分别实时获取位置传感器、测距雷达的监控数据;
46、根据位置传感器、测距雷达的监控数据,确定穿刺针相对地面的空间位置、穿刺针与待救飞机的相对空间位置;
47、基于穿刺针相对地面的空间位置、穿刺针与待救飞机的相对空间位置确定当前的作业范围边界;
48、若穿刺针随臂架系统运动的空间状态超出当前的作业范围边界,则不满足安全保护策略,停止各比例阀动作,因为当前存在操作与地面或待救援飞机的碰撞风险,同时在锁定危险操作后用于输出报警信息;
49、若穿刺针随臂架系统运动的空间状态始终在当前的作业范围边界内,则满足安全保护策略,继续触发各比例阀动作,控制各执行机构动作更新穿刺针随臂架系统运动的空间状态;或在臂架系统运动未达到目标空间位置前,修正穿刺针与臂架系统各比例电磁阀的电流、得电时间,触发各比例阀动作,控制各执行机构动作更新穿刺针随臂架系统运动的空间状态。
50、在进一步的实施例中,在臂架系统运动达到目标空间位置时,检测穿刺针状态,确定穿刺针弹射或输出报警信息包括:
51、在臂架系统运动达到目标空间位置时,获取穿刺针使用状态的视频数据;
52、根据穿刺针使用状态的视频数据检测穿刺针状态是否满足弹射条件;
53、在穿刺针状态满足弹射条件下,接收总线操控按键的控制数据;
54、根据总线操控按键的控制数据执行穿刺针弹射用于完成穿刺作业;
55、在穿刺针状态不满足弹射条件下,向显示器输出报警信息用于提醒操作人员控制各比例阀停止。
56、有益效果:本发明与现有技术相比具有以下优点:
57、(1)通过本发明的臂架类机场消防车智能控制方法及系统,在救援现场使用臂架系统进行救援作业时,实时监控穿刺针的空间位置,以及结合安全保护策略,防止穿刺针与地面或被救援飞机产生碰撞,提升救援效率,降低对能源和操作人员体力、精力的消耗。
58、(2)通过对臂架系统、穿刺针系统进行多维数据的同步采集与监控,预设多作业模式,并在不同作业模式下激发相应的安全保护策略,使其适应范围广泛能够在多工况下灵活控制穿刺针与地面或被救援飞机的距离,简化操控工序同时还能应用与其它消防车的救援工作。
59、(3)通过显示器实时输出报警信息及控制工序的提示,能够给予操作员精确、快捷、简单明了的操作参考,进一步降低操作难度,以及在紧急情况下及时停止各比例阀动作。
- 还没有人留言评论。精彩留言会获得点赞!