一种app控制机器人增量变速防翻倒方法、系统及介质与流程
本技术涉及机器人控制领域,具体而言,涉及一种app控制机器人增量变速防翻倒方法、系统及介质。
背景技术:
1、app界面上有速度挡位选择按钮,在控制摇杆控件上操作机器人移动的方向,app根据方向和速度挡位通过网址请求下发移动参数到底盘。底盘根据收到的参数输出动力,不同的速度参数会改变输出动力,目前现有的方案是app界面上有速度挡位选择按钮,在控制摇杆控件上长按拖动,操作机器人移动的方向,app根据方向和速度挡位每隔一小段时间通过http请求下发移动参数到底盘。底盘根据收到的参数输出动力,不同的速度参数会改变输出动力,假设app设置的速度挡位是2m/s,app下发前进指令到机器人,底盘功率按2m/s输出动力;现有的方案不考虑瞬间速度变化过大对车身稳定性的影响,现有方案不适用于在底盘轴距小,重心高的型号上,这些型号瞬间速度变化过大就难以保持车身稳定,容易出现侧翻;当正在快速运动的情况,立刻停下,同样有车身不稳定的问题,容易翻车,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本技术实施例的目的在于提供一种app控制机器人增量变速防翻倒方法、系统及介质,通过获取速度档位对应的机器人移动速度,判断机器人移动速度增量变速是否过大,从而对机器人移动速度进行适当调整,保证机器人平稳移动,防止机器人速度突变造成翻倒。
2、本技术实施例还提供了一种app控制机器人增量变速防翻倒方法,包括:
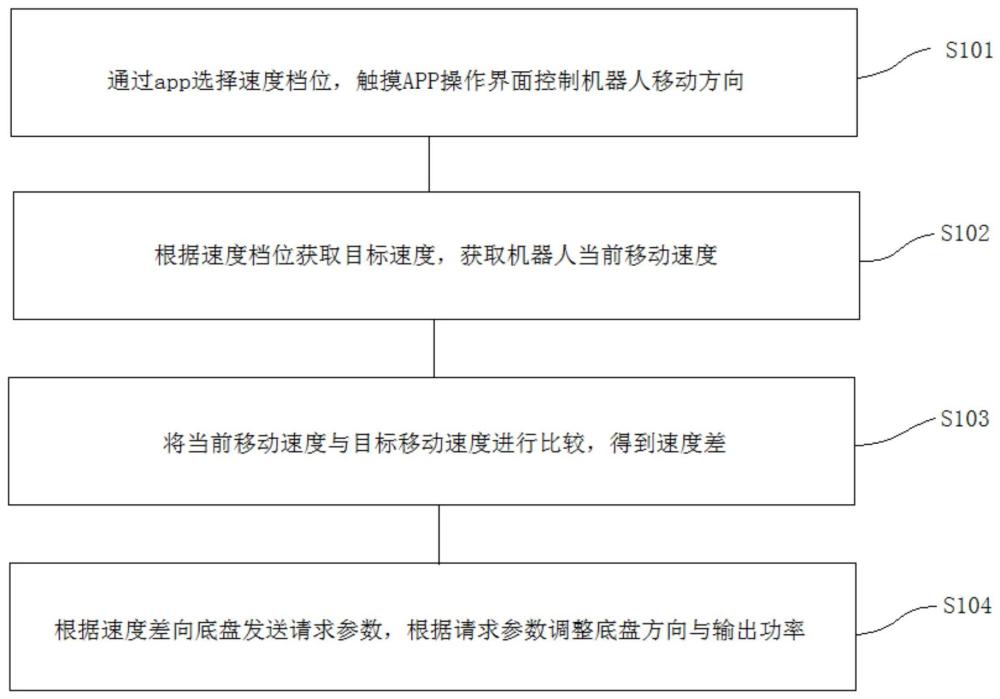
3、通过app选择速度档位,触摸app操作界面控制机器人移动方向;
4、根据速度档位获取目标速度,获取机器人当前移动速度,
5、将当前移动速度与目标移动速度进行比较,得到速度差;
6、根据速度差向底盘发送请求参数,根据请求参数调整底盘方向与输出功率。
7、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒方法中,通过app选择速度档位,触摸app操作界面控制机器人移动方向,具体包括:
8、每一个速度档位对应一个目标速度,相邻速度档位的目标速度的变量相同;
9、速度档位为4档,每一档的机器人移动速度相同,当速度档位切换时,机器人移动速度变化率相同;
10、机器人移动方向包括上、下、左与右。
11、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒方法中,通过app选择速度档位,触摸app操作界面控制机器人移动方向,具体包括:
12、通过摇杆控制机器人移动方向,获取摇杆状态信息,根据摇杆状态设定机器人预定移动方向;
13、获取机器人当前移动方向,将机器人当前移动方向与预定移动方向进行比较,得到方向夹角;
14、根据方向夹角生成调整信息,根据调整信息对机器人移动方向进行调整。
15、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒方法中,获取机器人当前移动速度之后,还包括:
16、根据机器人当前移动速速与安全停止速度进行比较,
17、若机器人当前移动速度大于安全停止速度,则生成第一减速信息,根据第一减速信息调整机器人当前移动速度;
18、若机器人当前移动速度小于安全停止速度,则获取机器人控制指令,当机器人控制指令为停止时,根据机器人当前移动速度生成第二减速信息,根据第二减速信息调整机器人当前移动速度匀速降低至零。
19、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒方法中,根据速度差向底盘发送请求参数,根据请求参数调整底盘方向与输出功率,具体包括:
20、获取速度差,将速度差与预设的速度差阈值进行比较;
21、若速度差大于第一速度差阈值且小于第二速度差阈值,则生成第一请求参数,根据第一请求参数调整底盘设定为第一方向与第一输出功率;
22、若速度差大于第二速度阈值,则生成第二请求参数,根据第二请求参数调整底盘设定为第二方向与第二输出功率。
23、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒方法中,根据速度档位获取目标速度,还包括:
24、获取速度档位,当速度档位发生变化时,建立若干个访问时间节点,根据不同访问时间节点生成请求次数,根据请求次数获取不同请求时间节点对应的机器人移动速度;
25、根据请求时间节点的机器人移动速度与目标速度进行比较,生成请求参数;
26、根据请求参数调整机器人移动速度。
27、第二方面,本技术实施例提供了一种app控制机器人增量变速防翻倒系统,该系统包括:存储器及处理器,所述存储器中包括app控制机器人增量变速防翻倒方法的程序,所述app控制机器人增量变速防翻倒方法的程序被所述处理器执行时实现以下步骤:
28、通过app选择速度档位,触摸app操作界面控制机器人移动方向;
29、根据速度档位获取目标速度,获取机器人当前移动速度,
30、将当前移动速度与目标移动速度进行比较,得到速度差;
31、根据速度差向底盘发送请求参数,根据请求参数调整底盘方向与输出功率。
32、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒系统中,通过app选择速度档位,触摸app操作界面控制机器人移动方向,具体包括:
33、每一个速度档位对应一个目标速度,相邻速度档位的目标速度的变量相同;
34、速度档位为4档,每一档的机器人移动速度相同,当速度档位切换时,机器人移动速度变化率相同;
35、机器人移动方向包括上、下、左与右。
36、可选地,在本技术实施例所述的app控制机器人增量变速防翻倒系统中,通过app选择速度档位,触摸app操作界面控制机器人移动方向,具体包括:
37、通过摇杆控制机器人移动方向,获取摇杆状态信息,根据摇杆状态设定机器人预定移动方向;
38、获取机器人当前移动方向,将机器人当前移动方向与预定移动方向进行比较,得到方向夹角;
39、根据方向夹角生成调整信息,根据调整信息对机器人移动方向进行调整。
40、第三方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括app控制机器人增量变速防翻倒方法程序,所述app控制机器人增量变速防翻倒方法程序被处理器执行时,实现如上述任一项所述的app控制机器人增量变速防翻倒方法的步骤。
41、由上可知,本技术实施例提供的一种app控制机器人增量变速防翻倒方法、系统及介质,通过app选择速度档位,触摸app操作界面控制机器人移动方向;根据速度档位获取目标速度,获取机器人当前移动速度,将当前移动速度与目标移动速度进行比较,得到速度差;根据速度差向底盘发送请求参数,根据请求参数调整底盘方向与输出功率;通过获取速度档位对应的机器人移动速度,判断机器人移动速度增量变速是否过大,从而对机器人移动速度进行适当调整,保证机器人平稳移动,防止机器人速度突变造成翻倒。
- 还没有人留言评论。精彩留言会获得点赞!