用于悬浮无容器处理技术的取放样装置、系统及方法
本技术涉及悬浮无容器处理,具体而言,涉及一种用于悬浮无容器处理技术的取放样装置、系统及方法。
背景技术:
1、悬浮无容器处理技术是通过外界物理场在地面模拟具有微重力、超高真空、无容器和强辐照等特征空间环境的关键技术,也是解决利用航天飞机、宇宙飞船、空间站和在轨卫星等空间实验系统开展材料研究存在的高成本、低实验次数和机会的重要手段。
2、悬浮无容器处理技术根据物理场的不同,可分为电磁悬浮、静电悬浮、气动悬浮和声悬浮等技术。主要是在具有超高真空或惰性气体氛围的封闭腔室内,通过电磁场、静电场、气体流场和声场等物理场产生的作用力抵消材料的重力,使材料处于悬浮、无容器接触的状态,从而对材料进行熔化、凝固、热物理性质测定等处理,达到研究制备新型材料、探索材料的热物理性质以及扩展材料的应用领域和范围的目的。
3、一般地,材料进行悬浮无容器处理时,需要保证超高真空的环境或者超低氧含量的惰性气体氛围,样品材料的处理过程均经过抽真空、气体氛围替换、样品悬浮和样品处理的过程。其中,抽真空和气体氛围替换占据了悬浮无容器处理2/3的时间。例如,通常对于40-50l的封闭腔室,需要3-4小时才能达到10-5pa的高真空,14-15小时左右能达到10-9pa的超高真空;在高真空或超高真空的前提下,进行气体氛围的替换需要1-2小时;总体上一个样品悬浮无容器处理的时间成本近乎20-22小时。在真空和特定气氛下,只进行一个样品的悬浮会导致时间成本较大;因此,需要在腔室内部实现样品的储存、回收、移动,这要求在腔室内部设置取放样系统,其中取放样装置对样品进行精准移动。
4、现有的悬浮无容器处理装置在批量样品的送取和回收处理上仍处于初步的探索阶段。目前主要以手动取放样品的方式为主,尤其涉及气动悬浮无容器处理技术。名称为“一种模拟微重力环境的材料凝固实验的装置及方法”,公开号为“cn104569033a”的发明专利申请中国专利(申请号:)公开了一种模拟微重力环境的材料凝固实验的装置,该装置提出了使用静电悬浮配合短落管的微重力无容器处理技术,样品的回收是通过样品掉入位于真空腔室底部的回收托盘实现,每次实验只能处理一个样品。名称为“一种自动换样机构”,公告号为“cn113353632b”的发明专利公开了一种自动换样机构,该装置安装于中子散射静电悬浮系统的真空腔室内,通过由落样导管连接的上下换样组件(样品盘采用多孔转盘式结构)以及下换样组件下方的样品回收机构,实现了多个样品在真空腔室的自动更换和回收,但该装置所需的安装空间大,尤其在高度方向,极大的扩展了真空腔室的尺寸,增加了抽真空的成本。此外,换样机构对悬浮样品周围的遮挡,限制了其在激光加热静电悬浮、电磁悬浮及气动悬浮等无容器处理系统上的应用和使用传感器对样品的密度、黏度、表面张力等热物理性质的测定。尤其是换样机构对气动悬浮系统喷嘴流场的干扰。
5、综上所述,现有的取放样装置或系统中,由于体积较大、干扰流场、影响探测和悬浮,不适用于在悬浮无容器处理技术中使用。
技术实现思路
1、本发明的目的在于,针对上述现有技术中的不足,提供一种用于悬浮无容器处理技术的取放样装置、系统及方法,以解决现有的取放样装置或系统中,由于体积较大、干扰流场、影响探测和悬浮,不适用于在悬浮无容器处理技术中使用问题。
2、为实现上述目的,本发明采用的技术方案如下:
3、本技术提供一种用于悬浮无容器处理技术的取放样装置、系统及方法。一种用于悬浮无容器处理技术的取放样装置,装置包括第一抓夹头和第二抓夹头,第一抓夹头和第二抓夹头对称设置,均向中间弯曲,第一抓夹头和第二抓夹头均设置有两个爪牙,两个爪牙之间有间隙,第一抓夹头和第二抓夹头相互靠近,处于闭合状态,第一抓夹头和第二抓夹头相互远离,处于打开状态;处于闭合状态时,所述爪牙的尖端部分布于球面上。
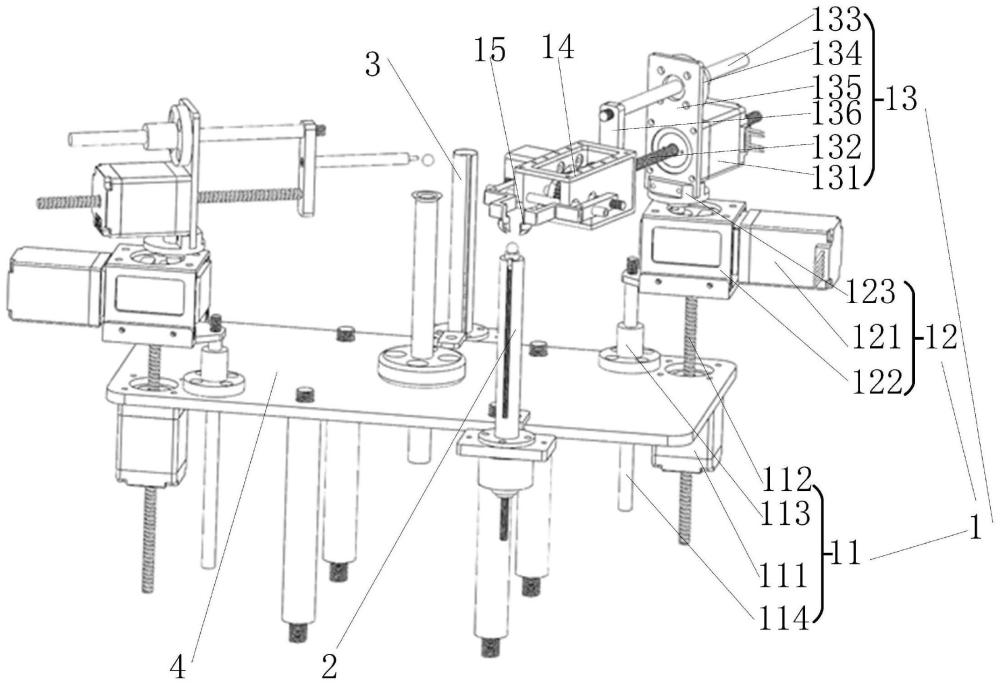
4、一种用于悬浮无容器处理技术的取放样系统,系统包括支撑部件,支撑部件上固定设置有第一储样装置、第二储样装置、移样装置,第一储样装置用于存放待悬浮的样品,第二储样装置用于存放悬浮后的样品,移样装置用于移动样品;移样装置包括固定设置于支撑部件上的竖直运动机构,与竖直运动机构固定连接的旋转运动机构,与旋转运动机构固定连接的水平运动机构。
5、进一步地,移样装置还包括与水平运动机构固定连接的传动机构,传动机构与抓夹机构固定连接,传动机构用于控制与抓夹机构的状态。
6、更进一步地,抓夹机构包括与传动装置固定连接的第一连接杆和第二连接杆,第一连接杆和第二连接杆的一端与传动装置连接,第一连接杆和第二连接杆的另一端与上述取放样装置连接,第一连接杆与第一抓夹头固定连接,第二连接杆与第二抓夹头固定连接。
7、更进一步地,竖直运动机构包括与支撑部件固定连接的第二电机和第一线性轴承,第二电机为贯穿式中空轴步进电机,第二丝杆贯穿第二电机,第二电机能够使得第二丝杆沿竖直方向移动;第一光轴贯穿第一线性轴承,第一光轴和第一线性轴承用于限位。
8、更进一步地,旋转运动机构包括与第二丝杆顶端固定连接的电机固定法兰,电机固定法兰上固定设置有第三电机,第三电机为带减速箱的步进电机,第三电机的电机轴沿竖直方向,第三电机的电机轴上固定设置有转动平台,转动平台随第三电机的电机轴的旋转而旋转。
9、更进一步地,水平运动机构包括与转动平台上侧固定连接的轴承-电机固定件,轴承-电机固定件贯穿设置有第三丝杆、第三光轴,第三丝杆贯穿第四电机,第三光轴通过第二线性轴承设置于轴承-电机固定件,第三丝杆和第三光轴还固定于光轴-丝杆固定件,光轴-丝杆固定件固定设置于第三丝杆和第三光轴的端部。
10、更进一步地,传动机构包括与光轴-丝杆固定件固定连接的固定外壳,固定外壳侧壁固定设置有第五电机,第五电机的电机轴与电机轴齿轮同轴固定连接,电机轴齿轮与正反转丝杆齿轮啮合,正反转丝杆齿轮与第四丝杆同轴固定连接,第四丝杆贯穿固定外壳的侧壁,第四光轴与第四丝杆平行等高设置,第四光轴贯穿固定外壳的侧壁,第四光轴和第四丝杆的两端设置有夹爪连接滑台,夹爪连接滑台设置于固定外壳外侧。
11、更进一步地,第一储样装置包括与支撑部件可拆卸固定连接的第一活动支架,第一活动支架的下侧面固定设置有第一电机,第一丝杆贯穿第一电机,第一丝杆贯穿第一活动支架,第一丝杆的顶端固定设置有活塞,第一丝杆侧周固定设置有第一储样筒。
12、本技术还提出了一种用于悬浮无容器处理技术的取放样方法,该方法包括如下步骤:
13、s1,将多个待悬浮样品依次装入第一储样筒内,并关闭真空腔室;
14、s2,对真空腔室抽真空和气体氛围替换;
15、s3,悬浮系统稳定工作后,利用上述取放样装置将第一储样筒内的样品移动到气动悬浮喷嘴正上方,待悬浮样品处于第一抓夹头和第二抓夹头之间的孔隙;
16、s4,逐渐竖直向下移动取放样装置,使得喷嘴喷射的气体对待悬浮样品的作用力逐渐增大,第一抓夹头和第二抓夹头接触处对样品的弹力逐渐减小,为零时,待悬浮样品处于悬浮状态,悬浮后,并撤离取放样装置至气动悬浮流场外围;
17、s5,在样品稳定悬浮过程进行熔化、热物理性质测定、凝固形核核心放置和快速凝固等悬浮无容器处理实验;
18、s6,悬浮结束,控制取放样装置在气动悬浮喷嘴正上方夹取实验结束后的悬浮样品,移动至第二储样筒;
19、s7,重复s3-s6的步骤,直至所有的样品都完成悬浮无容器处理实验;
20、s8,打开真空腔室,取出第二储样筒,取出所有悬浮后的样品,实验结束。
21、与现有技术相比,本发明的有益效果:本技术取放样系统体积小、移动精度高,能够用于悬浮腔室内部的夹取和放下样品。实现一次抽真空和气体气氛替换工序后,进行多个样品材料的悬浮无容器处理。极大的降低了悬浮无容器处理技术的时间成本,将悬浮无容器处理技术的效率提高。此外,取放样系统独立于悬浮系统,对悬浮样品周围无遮挡,可实现静电悬浮、电磁悬浮等多个悬浮无容器处理系统兼容使用。
22、同时,本技术取放样装置、系统、方法中,利用抓夹辅助样品悬浮,在放样时,将样品置于气流较高处,气流从抓夹之间流过,产生气膜,对样品产生力的作用,抓夹对样品起到支撑作用,逐渐向下移动抓夹,气流对样品的作用力逐渐变大,抓夹对样品的支撑作用之间变小,变为零时,样品在抓夹结构内部稳定悬浮,最后移走抓夹,样品稳定悬浮;取放样装置的抓夹,使得取放样装置对腔室内部的流场不产生干扰,样品悬浮更稳定,本技术使得样品的悬浮过程更稳定。
- 还没有人留言评论。精彩留言会获得点赞!