一种具有2T1R与1T2R两模式的变胞并联机构
本发明涉及机器人,具体而言,尤其涉及一种具有2t1r与1t2r两模式的变胞并联机构。
背景技术:
1、具有固定自由度特性的并联机构由于其刚度大、承载能力大、精度高、等特点而广泛应用在工业机器人、运动模拟器、姿态控制器、医疗机器人等方面,但是伴随着科技的发展,在工业生产、航空航天、医疗康复等多个领域,需要能根据作业环境变化而进行运动模式自由切换的可重构机构。在此背景下,学者们对可重构并联机构研究逐渐加深,可重构并联机构主要分为两种类型,主要包括运动分岔并联机构和变胞并联机构,通过用自由度可变的变胞运动副代替运动过程中不发生改变的传统自由度运动副,从而使机构支链约束性质在运动过程中发生变化,最终设计出新型变胞机构,较比运动分岔并联机构,没有运动分岔点,两种运动模式完全独立。
2、目前能够实现2t1r与1t2r两模式变胞并联机构较少,且多结构复杂灵活性较差、切换模式过程复杂,运动模式容易互相干扰,运动学和动力学性能不佳,承载能力差,该类机构在焊接、钻铆曲面加工、大型设备姿态调节器、工业机器人等领域有一定应用前景。
3、因此,如何改变现有技术中,能够实现2t1r与1t2r两模式变胞并联机构模式切换过程复杂,且运动性能不佳、承载能力差的现状,成为了本领域技术人员亟待解决的问题。
技术实现思路
1、根据上述提出的技术问题,而提供一种具有2t1r与1t2r两模式的变胞并联机构。
2、本发明采用的技术手段如下:
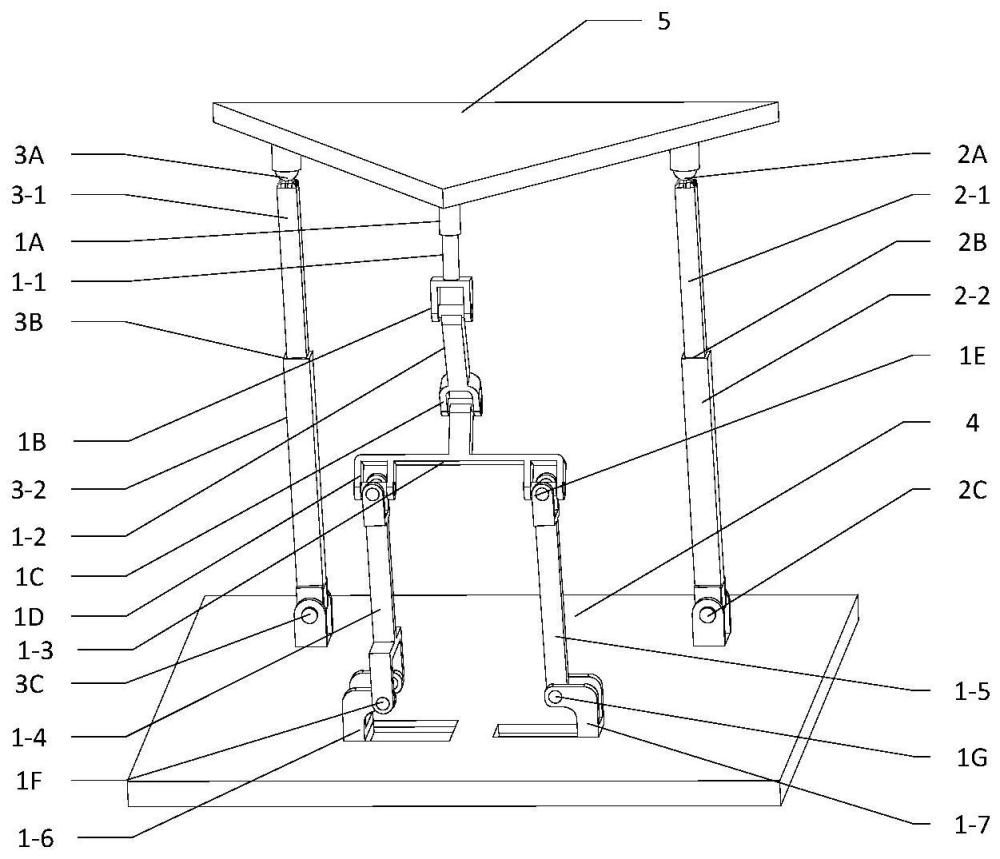
3、一种具有2t1r与1t2r两模式的变胞并联机构,包括所述并联机构包括动平台、第一支链、第二支链、第三支链和定平台;所述第一支链、第二支链和第三支链设置在动平台和定平台之间,三条支链沿中心对称分布;所述第二支链和第三支链的结构相同并关于第一支链对称布置;所述第一支链由动平台至定平台之间依次设置有五个转动副、两个u副,所述第二支链和第三支链由动平台至定平台之间依次设置有五个转动副和两个u副,第一支链中靠近定平台的两个转动副和两个u副组成平行四边形构型、平行四边形构型中与定平台连接的两个转动副可通过定平台中的两个滑轨移动副连接实现移动,第一支链中与平行四边形连接的转动副、第二支链中移动副、第三支链中转动副、定平台上两个滑轨移动副为驱动副,即该并联机构共包含五个驱动副,五个驱动副驱动所述动平台相对于所述定平台实现空间二平移一转动工作模式与一平移两转动工作模式的运动与相互切换。
4、进一步地,所述定平台的底座为矩形平板,该矩形平板上有两条并行的移动滑轨分布在第一支链的转动副铰支座下。动平台为三角形结构,对称两角有球副铰支座,另外一角有转动铰支座,铰支座转动轴线与动平台垂直,用于和支链连接。
5、进一步地,所述第二支链和第三支链的结构相同,包括连杆ⅰ、连杆ⅱ、支链球副、支链移动副、支链转动副,连杆ⅰ顶端通过支链球副和动平台上的固定铰支座连接,连杆ⅰ末端通过支链移动副和连杆ⅱ顶端连接,连杆ⅱ末端通过支链转动副和定平台上的固定铰支座连接。
6、进一步地,所述第一支链包括第一滑动铰支座、第二滑动铰支座、第一连杆、第二连杆、第三连杆、第四连杆、第五连杆,以及第一转动副、第二转动副、第三转动副、第四转动副、第五转动副、第一虎克铰、第二虎克铰。所述第一支链中第一连杆顶端通过第一转动副和动平台上的固定铰支座连接,第二连杆顶端通过第二转动副和第一连杆末端连接,第二连杆末端通过第三转动副和第三连杆顶端连接,第三连杆末端分别通过第一虎克铰和第二虎克铰与第四连杆、第五连杆连接组成平行四边形构型,第四连杆末端通过第四转动副和第一滑动铰座连接,第五连杆末端通过第五转动副和第二滑动铰座连接,滑动铰支座与定平台上的滑轨连接。
7、进一步地,所述第一支链中,第一转动副轴线方向与第二、三转动副轴线方向垂直,第三连杆和第四连杆、第五连杆,通过第一虎克铰、第二虎克铰组成闭环平行四边形构型,第一滑动铰支座和第二滑动铰支座可通过与定平台上的滑轨,实现转动轴线共线。
8、进一步地,所述第二支链和第三支链中,支链移动副运动方向与支链转动副轴线垂直,并且通过支链球副球心。
9、进一步地,所述第一支链中第一滑动铰支座和第二滑动铰支座通过定平台上的滑轨,实现转动副轴线共线时,机构进入到一平移二转动的工作模式。当第一支链中滑动铰支座分开,固定在两侧使得第四连杆、第五连杆平行时,机构进入到两平移一转动的工作模式,两模式互不干扰,且不会发生奇异位形。
10、较现有技术相比,本发明具有以下优点:
11、本发明通过驱动五个运动副,驱动动平台相对于定平台实现两平移一转动,一平移两转动的两种工作模式的运动和相互切换,以应对不同的工作环境。本并联机构支链对称分布,其承载能力强,计算和控制简单,可应用于货物的搬运与分拣、大型零部件精密机床、大型工程机械隔振系统、飞行系统模拟器等。
技术特征:
1.一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,包括所述并联机构包括动平台、第一支链、第二支链、第三支链和定平台;所述第一支链、第二支链和第三支链设置在动平台和定平台之间,三条支链沿中心对称分布;所述第二支链和第三支链的结构相同并关于第一支链对称布置;所述第一支链由动平台至定平台之间依次设置有五个转动副、两个u副,所述第二支链和第三支链由动平台至定平台之间依次设置有球副、移动副、转动副,第一支链中靠近定平台的两个转动副和两个u副组成平行四边形构型、平行四边形构型中与定平台连接的两个转动副可通过定平台中的两个滑轨移动副连接实现移动,第一支链中与平行四边形连接的转动副、第二支链中移动副、第三支链中转动副、定平台上两个滑轨移动副为驱动副,即该并联机构共包含五个驱动副,五个驱动副驱动所述动平台相对于所述定平台实现空间二平移一转动工作模式与一平移两转动工作模式的运动与相互切换。
2.根据权利要求1所述的一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,所述定平台的底座为矩形平板,该矩形平板上有两条并行的移动滑轨分布在第一支链的转动副铰支座下。动平台为三角形结构,对称两角有球副铰支座,另外一角有转动铰支座,铰支座转动轴线与动平台垂直,用于和支链连接。
3.根据权利要求1所述的一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,所述第二支链和第三支链的结构相同,包括连杆ⅰ、连杆ⅱ、支链球副、支链移动副、支链转动副,第二支链第一连杆ⅰ顶端通过支链球副和动平台上的固定铰支座连接,第一连杆ⅰ末端通过支链移动副和连杆ⅱ顶端连接,连杆ⅱ末端通过支链转动副和定平台上的固定铰支座连接。
4.根据权利要求1所述的一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,所述第一支链包括第一滑动铰支座、第二滑动铰支座、第一连杆、第二连杆、第三连杆、第四连杆、第五连杆,以及第一转动副、第二转动副、第三转动副、第四转动副、第五转动副、第一虎克铰、第二虎克铰。所述第一支链中第一连杆顶端通过第一转动副和动平台上的固定铰支座连接,第二连杆顶端通过第二转动副和第一连杆末端连接,第二连杆末端通过第三转动副和第三连杆顶端连接,第三连杆末端分别通过第一虎克铰和第二虎克铰与第四连杆、第五连杆连接组成平行四边形构型,第四连杆末端通过第四转动副和第一滑动铰座连接,第五连杆末端通过第五转动副和第二滑动铰座连接,滑动铰支座与定平台上的滑轨连接。
5.根据权利要求4所述的一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,所述第一支链中,第一转动副轴线方向与第二、三转动副轴线方向垂直,第三连杆和第四连杆、第五连杆,通过第一虎克铰、第二虎克铰组成闭环平行四边形构型,第一滑动铰支座和第二滑动铰支座可通过与定平台上的滑轨,实现转动轴线共线。
6.根据权利要求3所述的一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,所述第二支链和第三支链中,支链移动副运动方向与支链转动副轴线垂直,并且通过支链球副球心。
7.根据权利要求4所述的一种具有2t1r与1t2r两模式的变胞并联机构,其特征在于,所述第一支链中第一滑动铰支座和第二滑动铰支座通过定平台上的滑轨,实现转动副轴线共线时,机构进入到一平移二转动的工作模式。当第一支链中滑动铰支座分开,固定在两侧使得第四连杆、第五连杆平行时,机构进入到两平移一转动的工作模式,两模式互不干扰,且不会发生奇异位形。
技术总结
本发明提供一种具有2T1R与1T2R两模式的变胞并联机构,并联机构包括动平台、第一支链、第二支链、第三支链和定平台;第一支链、第二支链和第三支链设置在动平台和定平台之间,三条支链沿中心对称分布;第二支链和第三支链的结构相同并关于第一支链对称布置;第一支链由动平台至定平台之间依次设置有五个转动副、两个U副,第二支链和第三支链由动平台至定平台之间依次设置有球副、移动副、转动副,本发明通过驱动五个运动副,驱动动平台相对于定平台实现两平移一转动,一平移两转动的两种工作模式的运动和相互切换,以应对不同的工作环境,本其承载能力强,计算和控制简单,可应用于货物的搬运与分拣、大型工程机械隔振系统、飞行系统模拟器等。
技术研发人员:李恒智
受保护的技术使用者:河北对外经贸职业学院
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!