基于机器人的拍摄方法及机器人与流程
本申请涉及机器人,尤其涉及一种基于机器人的拍摄方法及机器人。
背景技术:
1、相关技术中,机器人是使用自身的摄像头为用户拍摄,但通常为了减少生产成本,机器人的摄像头清晰度较低,不足以满足用户的拍摄需求。
技术实现思路
1、有鉴于此,本申请提供一种基于机器人的拍摄方法及机器人,以解决相关技术中的技术问题。
2、为实现上述目的,本申请提供技术方案如下:
3、根据本申请实施例的第一方面,提供一种基于机器人的拍摄方法,所述机器人包括机械臂,所述机械臂用于固定拍摄设备,所述方法包括:
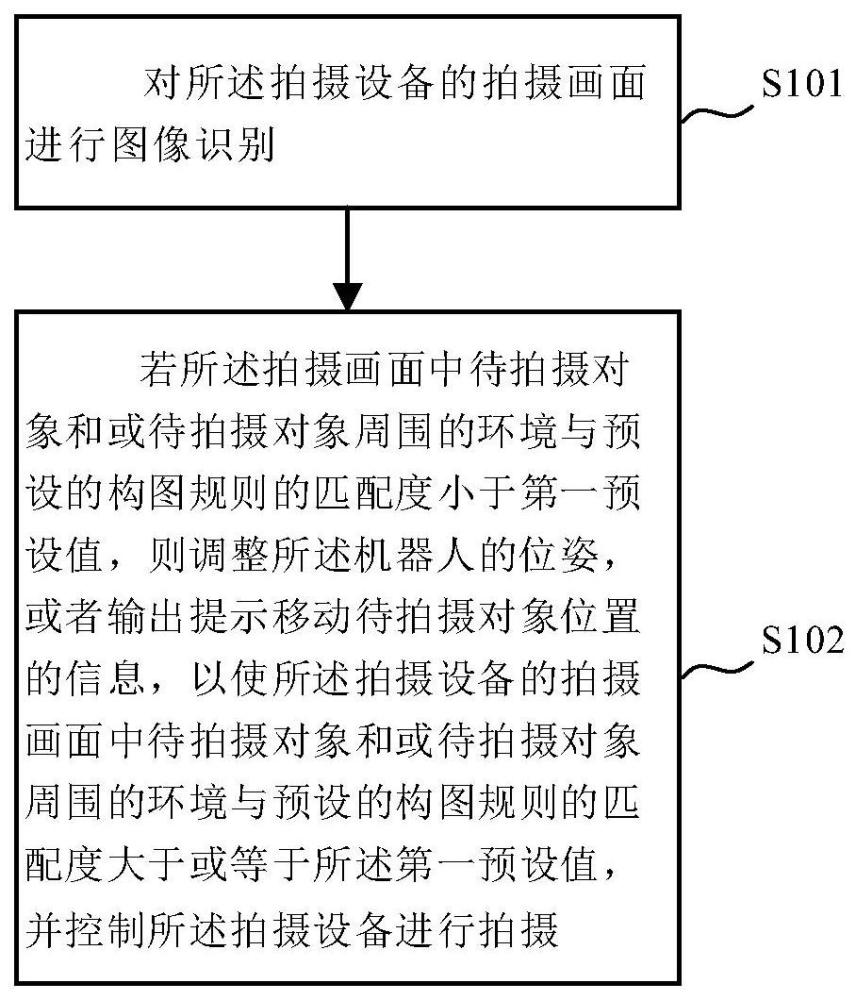
4、对所述拍摄设备的拍摄画面进行图像识别;
5、若所述拍摄画面中待拍摄对象和/或待拍摄对象周围的环境与预设的构图规则的匹配度小于第一预设值,则调整所述机器人的位姿,或者输出提示移动待拍摄对象位置的信息,以使所述拍摄设备的拍摄画面中待拍摄对象和/或待拍摄对象周围的环境与预设的构图规则的匹配度大于或等于所述第一预设值,并控制所述拍摄设备进行拍摄。
6、可选的,所述方法还包括:若待拍摄对象的体态信息与预设体态信息的匹配度小于第二预设值,则输出提示待拍摄对象调整体态的信息;
7、在预设时间内,若待拍摄对象调整后的体态信息与预设体态信息的匹配度大于或等于第二预设值,则控制所述拍摄设备进行拍摄。
8、可选的,所述方法还包括:若输出提示待拍摄对象调整体态的信息后,在预设时间内,待拍摄对象未调整体态,或者接收到直接拍摄的指令信息,或者调整后的体态信息与预设体态信息的匹配度始终小于所述第二预设值,则控制所述拍摄设备进行拍摄。
9、可选的,所述方法还包括:将拍摄得到的照片或视频,与预设体态信息对应的照片或视频进行对比,展示对比结果。
10、可选的,调整所述机器人的位姿包括:
11、基于所述拍摄设备的视场角、所述拍摄设备与所述待拍摄对象之间的距离,以及所述待拍摄对象在所述拍摄画面中的位置,确定待拍摄对象和待拍摄对象周围的环境,相对于预设的构图规则所规定的待拍摄对象和待拍摄对象周围的环境在拍摄画面中所处的位置的偏移角度和偏移距离;
12、基于所述偏移距离和所述偏移角度,调整所述机器人的位姿。
13、根据本申请实施例的第二方面,提供一种机器人,包括机身,与所述机身连接的至少一个机械臂,所述机械臂用于固定拍摄设备;
14、所述机器人还包括与所述机身通信的控制系统,所述控制系统包括处理器和与所述处理器通信的存储器,所述存储器存储指令,所述指令在所述处理器上被运行时使所述处理器执行操作,所述操作包括:
15、对所述拍摄设备的拍摄画面进行图像识别;
16、若所述拍摄画面中待拍摄对象和/或待拍摄对象周围的环境与预设的构图规则的匹配度小于第一预设值,则调整所述机器人的位姿,或者输出提示移动待拍摄对象位置的信息,以使所述拍摄设备的拍摄画面中待拍摄对象和/或待拍摄对象周围的环境与预设的构图规则的匹配度大于或等于所述第一预设值,并控制所述拍摄设备进行拍摄。
17、由以上技术方案可见,本申请通过机器人的机械臂固定拍摄设备,对拍摄设备的拍摄画面进行图像识别,在待拍摄对象和/或待拍摄对象周围的环境与构图规则的匹配度符合要求时,控制拍摄设备为用户拍摄,从而使机器人可以使用用户选择的任意清晰度的拍摄设备进行拍摄,满足用户的拍摄需求,提升用户体验感。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种基于机器人的拍摄方法,其特征在于,所述机器人包括机械臂,所述机械臂用于固定拍摄设备,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求2所述的方法,其特征在于,还包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求1所述的方法,其特征在于,调整所述机器人的位姿包括:
6.一种机器人,其特征在于,包括机身,与所述机身连接的至少一个机械臂,所述机械臂用于固定拍摄设备;
7.根据权利要求6所述的机器人,其特征在于,所述操作还包括:
8.根据权利要求7所述的机器人,其特征在于,所述操作还包括:
9.根据权利要求8所述的机器人,其特征在于,所述操作还包括:
10.根据权利要求6所述的机器人,其特征在于,调整所述机器人的位姿包括:
技术总结
本申请提供一种基于机器人的拍摄方法及机器人,所述机器人包括机械臂,所述机械臂用于固定拍摄设备,所述方法包括:对所述拍摄设备的拍摄画面进行图像识别;若所述拍摄画面中待拍摄对象和/或待拍摄对象周围的环境与预设的构图规则的匹配度小于第一预设值,则调整所述机器人的位姿,或者输出提示移动待拍摄对象位置的信息,以使所述拍摄设备的拍摄画面中待拍摄对象和/或待拍摄对象周围的环境与预设的构图规则的匹配度大于或等于所述第一预设值,并控制所述拍摄设备进行拍摄。通过上述方法可以使机器人使用用户选择的任意清晰度的拍摄设备进行拍摄,满足用户的拍摄需求,提升用户体验感。
技术研发人员:庞景中
受保护的技术使用者:广州小鹏汽车科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!