空间机械臂视觉伺服运动规划方法、系统、介质和设备与流程
所属的技术人员知道,本发明可以实现为方法、系统、存储介质和电子设备。因此,本发明可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
背景技术:
1、空间机械臂能够有效替代航天员进行在轨作业和舱外活动,显著降低空间任务的整体风险和成本,已被广泛应用于航天器在轨故障检测、模块更换、载荷安装与照料、舱外设备检查等操作任务。
2、为了实现空间机械臂的精准控制,航天器舱体表面通常布置合作靶标,空间机械臂视觉伺服运动模式通过自身携带的测量相机对靶标进行精准测量,根据测量数据计算机械臂的末端位姿,从而实现机械臂的精准控制。航天器在空间轨道上运动,受太阳、地球和航天器相对位置关系的影响,每天需要经历多个日出日落,空间机械臂运动在阴影区时,需要使用自身携带的照明设备进行补光,能够保证准确识别靶标信息;机械臂运动在阳照区时,若阳光直射在机械臂相机上或航天器本体的影子投射到舱体靶标上,机械臂相机识别靶标可能出现异常,导致视觉伺服运动存在异常。
3、目前的普遍做法是将机械臂视觉运动安排在阴影区实施。首先,根据轨道确定情况更新航天器位置,然后,依据太阳、地球、航天器的相对位置关系计算光照阴影预报,选取同时满足测控区和阴影区的弧段安排机械臂视觉伺服运动事件(如图2所示),但此方式的测控区利用率低,事件安排时间长。
4、因此,亟需提供一种技术方案解决上述问题。
技术实现思路
1、为解决上述技术问题,本发明提供了一种空间机械臂视觉伺服运动规划方法、系统、介质和设备。
2、第一方面,本发明提供一种空间机械臂视觉伺服运动规划方法,该方法的技术方案如下:
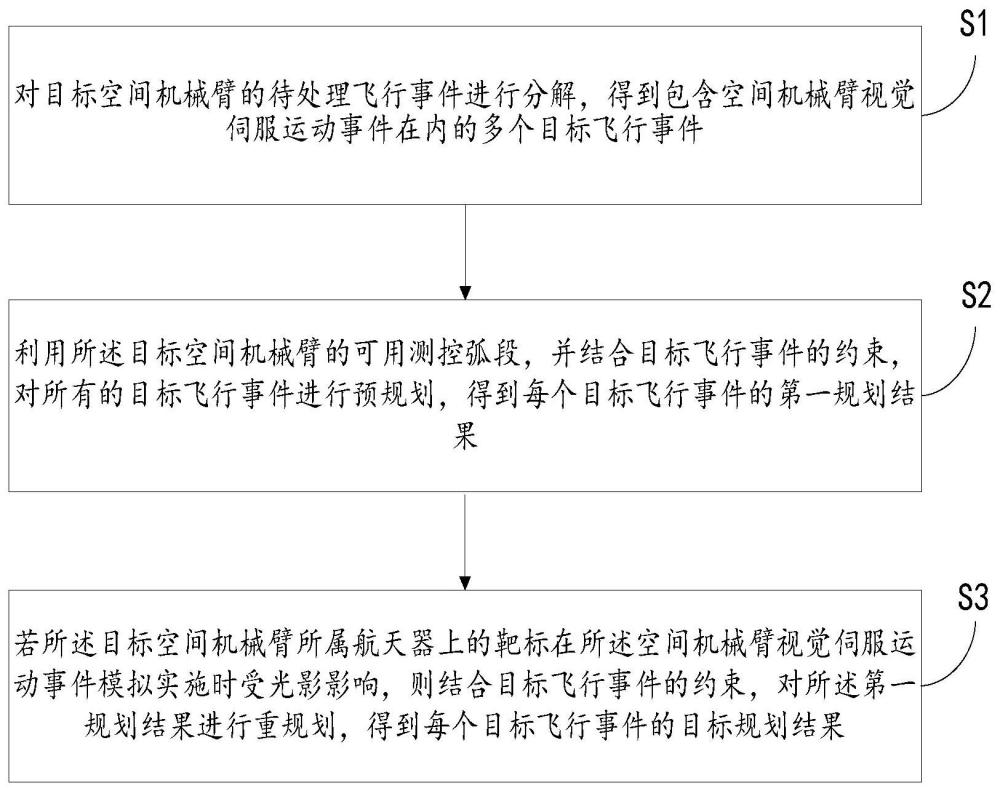
3、对目标空间机械臂的待处理飞行事件进行分解,得到包含空间机械臂视觉伺服运动事件在内的多个目标飞行事件;
4、利用所述目标空间机械臂的可用测控弧段,并结合目标飞行事件的约束,对所有的目标飞行事件进行预规划,得到每个目标飞行事件的第一规划结果;
5、若所述目标空间机械臂所属航天器上的靶标在所述空间机械臂视觉伺服运动事件模拟实施时受光影影响,则结合目标飞行事件的约束,对所述第一规划结果进行重规划,得到每个目标飞行事件的目标规划结果。
6、本发明的一种空间机械臂视觉伺服运动规划方法的有益效果如下:
7、本发明的方法通过分析光影对空间机械臂视觉伺服运动的影响,规划满足实施约束的空间机械臂视觉伺服运动事件,在提升空间机械臂实施效率的同时,还减轻了航天员和地面科研人员的工作压力。
8、在上述方案的基础上,本发明的一种空间机械臂视觉伺服运动规划方法还可以做如下改进。
9、在一种可选的方式中,还包括:
10、根据所述目标空间机械臂所属航天器的运行轨道,计算所述航天器在所述空间机械臂视觉伺服运动事件模拟实施时的模拟运行位置;
11、根据所述空间机械臂视觉伺服运动事件模拟实施时的航天器预测位置、太阳预测位置和所述目标空间机械臂上的相机位置,确定所述目标空间机械臂所属航天器上的靶标在所述空间机械臂视觉伺服运动事件模拟实施时是否受光影影响。
12、在一种可选的方式中,还包括:
13、若所述目标空间机械臂所属航天器上的靶标在所述空间机械臂视觉伺服运动事件模拟实施时不受光影影响,则将所述第一规划结果确定为所述目标规划结果。
14、在一种可选的方式中,还包括:
15、基于所述目标空间机械臂所属航天器的平台运行姿态以及太阳翼控制策略,确定所述可用测控弧段。
16、第二方面,本发明提供一种空间机械臂视觉伺服运动规划系统,该系统的技术方案如下:
17、一种空间机械臂视觉伺服运动规划系统,包括:分解模块、预规划模块和重规划模块;
18、所述分解模块用于:对目标空间机械臂的待处理飞行事件进行分解,得到包含空间机械臂视觉伺服运动事件在内的多个目标飞行事件;
19、所述预规划模块用于:利用所述目标空间机械臂的可用测控弧段,并结合目标飞行事件的约束,对所有的目标飞行事件进行预规划,得到每个目标飞行事件的第一规划结果;
20、所述重规划模块用于:若所述目标空间机械臂所属航天器上的靶标在所述空间机械臂视觉伺服运动事件模拟实施时受光影影响,则结合目标飞行事件的约束,对所述第一规划结果进行重规划,得到每个目标飞行事件的目标规划结果。
21、本发明的一种空间机械臂视觉伺服运动规划系统的有益效果如下:
22、本发明的系统通过分析光影对空间机械臂视觉伺服运动的影响,规划满足实施约束的空间机械臂视觉伺服运动事件,在提升空间机械臂实施效率的同时,还减轻了航天员和地面科研人员的工作压力。
23、在上述方案的基础上,本发明的一种空间机械臂视觉伺服运动规划系统还可以做如下改进。
24、在一种可选的方式中,还包括:判断模块;所述判断模块用于:
25、根据所述目标空间机械臂所属航天器的运行轨道,计算所述航天器在所述空间机械臂视觉伺服运动事件模拟实施时的模拟运行位置;
26、根据所述空间机械臂视觉伺服运动事件模拟实施时的航天器预测位置、太阳预测位置和所述目标空间机械臂上的相机位置,确定所述目标空间机械臂所属航天器上的靶标在所述空间机械臂视觉伺服运动事件模拟实施时是否受光影影响。
27、在一种可选的方式中,还包括:规划确定模块;
28、所述规划确定模块用于:若所述目标空间机械臂所属航天器上的靶标在所述空间机械臂视觉伺服运动事件模拟实施时不受光影影响,则将所述第一规划结果确定为所述目标规划结果。
29、在一种可选的方式中,还包括:确定模块;
30、所述确定模块用于:基于所述目标空间机械臂所属航天器的平台运行姿态以及太阳翼控制策略,确定所述可用测控弧段。
31、第三方面,本发明提供的一种存储介质的技术方案如下:
32、存储介质中存储有指令,当计算机读取所述指令时,使所述计算机执行如本发明的一种空间机械臂视觉伺服运动规划方法的步骤。
33、第四方面,本发明的一种电子设备的技术方案如下:
34、包括存储器、处理器及存储在所述存储器上并在所述处理器上运行的程序,所述处理器执行所述程序时实现如本发明的一种空间机械臂视觉伺服运动规划方法的步骤。
35、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!