一种对气囊式内窥机器人操作的蛇形臂机械手的控制系统
本发明属于航空发动机和燃气轮机维护保障领域,涉及一种对气囊式内窥机器人操作的蛇形臂机械手的控制系统。
背景技术:
1、内窥技术是对涡轮发动机进行无损检测的一种重要手段,图1所示的视频内窥镜5为当前内窥技术典型的一类设备。如图1(a)所示,其原理首先是借助导线53的支撑将镜头及照明51送入发动机内部,然后利用镜头及照明51对前方进行照明和图像采集,并将采集到的图像数据传输到主机55的显示屏552或连接在视频接口551上的外接屏幕54进行显示。
2、导线53由多层结构组成,如图1(b)所示。导线最内层分别是用于控制弯曲部52弯曲的多条导向金属丝534、传递光源的照明光纤535和传输信号的信号电缆536。中间层的钢制单绞线管533可以使导线53维持一定刚度,由此可以通过主机55上的控制按钮553控制多条导向金属丝534的松紧程度,从而使弯曲部52朝不同方向弯曲时,同时保证导线53不会出现收缩的情况。最外层是钨丝编制外皮532和塑料外皮531,对导线53内部结构起到保护作用。因此可以看到,该种视频内窥镜5的导线53内部没有用于实现其自身可控弯曲的结构,只能通过人工进行半可控的扭转、推拉等操作调整导线53工作时的位置。所以虽然该种内窥镜可实现整体弯曲,但是仅有镜头及照明51可以在小范围内调整自身的朝向,而其它部分的弯曲并不控,因此在潜入发动机内部的复杂空间时,可达范围十分有限。
3、图2所示为一种蛇形内窥镜7,其进入发动机的部分由多个单元体71、关节72和探头73构成,多个单元体71之间通过关节72相连接,可以发生多个方向的相对转动。该种蛇形内窥镜7穿过内层机匣65上的内层机匣内窥孔64后,进入到带内窥孔静叶66的叶栅,然后经过多个关节72的弯曲,使得探头73能够对准动叶67进行观察。该种蛇形内窥镜7弯曲时的可控程度较高,但是由于单元体71和关节72的数目多,因此结构复杂,并且控制过程难度高,这导致该种内窥镜不仅成本高,而且可靠性差。
4、现有的部分内窥镜会在端部安装抓取装置,如图3所示,包括鳄口式、吊篮式、套取式、抓取式、磁铁式和挂钩式等类型,但是其抓取装置力度低、力量小,并且在抓取以后不能进行锁紧,所以容易在携带抓取物运动的过程中意外松开,导致抓取物脱落。最主要是的,由于这些抓取装置的形状是面向普适的结构简单的物体而设计,因此其抓取装置功能比较单一,不能对专用内窥机器人进行抓取,也无法在抓取后对其进行其他的操作。
5、综上,依靠现有技术以及其组合,无法实现对无线式内窥机器人的操作,也就无法实现对内窥盲区的消除,严重影响对发动机维护保障的效果和使用安全,因此迫切需要发明新型技术对此加以解决。
技术实现思路
1、针对已有内窥镜运动时的可控程度和自身结构复杂性之间存在矛盾,以及其执行动作单一的问题,发明了一种对气囊式内窥机器人操作的蛇形臂机械手的控制系统。该装置能够通过简单的少数关节实现机械臂的可控弯曲,而且能对特定的气囊式内窥机器人进行夹持和放置,并在夹持以后进行锁紧防止松脱。蛇形臂机械手夹持住气囊式内窥机器人后可以沿导轨运动,从而能够携带气囊式内窥机器人进出发动机内部。并且该蛇形臂机械手能够对气囊式内窥机器人进行充放气等操作,由此辅助气囊式内窥机器人与叶片相固定或者脱离,从而使得气囊式内窥机器人可以完成对发动机内部零件的检查工作。
2、本发明的技术方案如下:
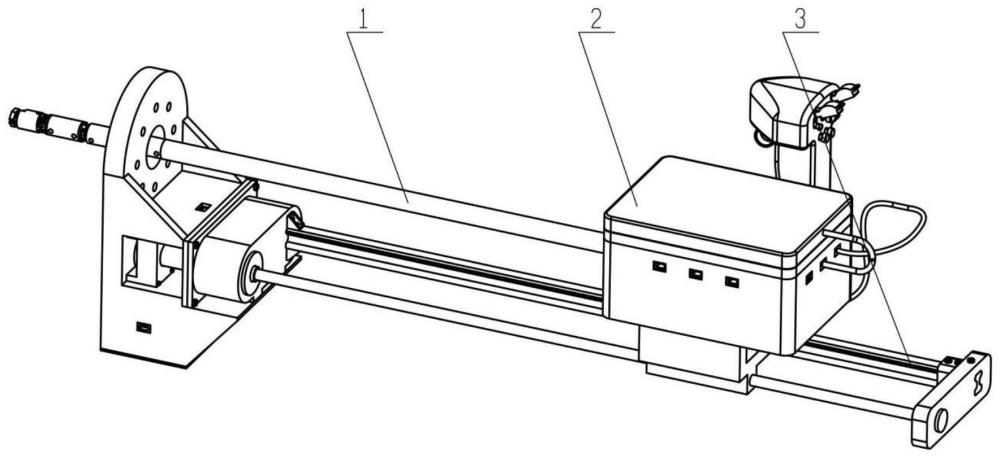
3、一种对气囊式内窥机器人操作的蛇形臂机械手的控制系统,包括蛇形臂、控制箱、支撑和传动系统,如图4所示。
4、蛇形臂能够在驱动绳索的牵引下借助关节进行一定程度的可控弯曲,其端部装有执行装置用于夹持和释放气囊式内窥机器人,并能在将气囊式内窥机器人送到动叶叶栅后,配合充气设备对其进行充放气操作。其结构如图5所示,包括机械手、执行单元、弯曲单元、刚性段、分线盘以及内部的驱动绳索、输气管等零部件组成。
5、所述的机械手用于夹持和释放气囊式内窥机器人,包括左右两个手爪、作动轴、安装架及其配套安装件等,其结构如图6所示。固定销轴依次穿过安装架上的安装架销轴孔、手爪销轴孔,使得手爪可绕固定销轴转动。滑动销轴依次穿过安装架滑动槽、两侧的手爪滑动槽和作动轴转轴孔,并令作动轴位于两个手爪之间。机械手驱动绳索顶部为台阶形的绳帽,可以安装在作动轴底部的绳索安装孔内,并起到连接和固定作用,由此能够通过机械手驱动绳索对作动轴施加拉力。安装架底部设有安装架固定边,用于与执行单元相固定。
6、当作动轴上下运动时,可以控制手爪的开合,如图7(a)所示,进而实现对气囊式内窥机器人的夹持手柄进行夹持和释放。对夹持手柄的形状和手爪之间的空间均采用四棱柱设计,二者尺寸相匹配,使得夹持手柄在被手爪夹紧时无法转动;并且受夹持手柄端部圆柱型凸起的阻碍,也无法从手爪的夹持中脱出,由此能够提高本发明中机械手对气囊式内窥机器人操作过程的稳定性和紧固程度,如图7(b)所示。
7、蛇形臂的执行单元、弯曲单元和刚性段之间通过关节进行连接,在驱动绳索的作用下可以进行可控弯曲。执行单元可以对特定的气囊式内窥机器人进行夹取、释放、锁紧、充放气等操作,其各零件安装在图8所示的执行单元安装管上。
8、执行单元的工作过程如图9所示。首先如(1)所示,蛇形臂朝着气囊式内窥机器人运动。当有线摄像头及led灯观察到机械手到达合适位置后,机械手闭合,夹持住气囊式内窥机器人的夹持手柄,如(2)所示。如(3)所示,当机械手闭合后,防开架在防开架弹簧的作用下向上运动,抱住机械手的手爪,防止机械手因意外打开。充气嘴安装在防开架输气道顶部,随防开架一起向上运动并插入气囊式内窥机器人手柄通气孔内的气囊接嘴。防开架输气道底部与输气管相连,由此可以采用输气设备通过输气管、防开架输气道和充气嘴组成的气体通道对气囊进行充放气。
9、执行单元的装配过程如图10所示。有线摄像头及led灯插入执行单元安装管上的有线摄像头及led灯安装孔,用于在蛇形臂的运动过程中观察前方视野以及机械手与气囊式内窥机器人的相对位置,并确定是否已将气囊式内窥机器人运送到指定区域。机械手弹簧套在机械手的作动轴外侧,并插入执行单元安装管底部的机械手弹簧安装孔内。机械手的安装架固定边插入执行单元安装管底部的机械手安装槽,从执行单元安装管外部将侧向螺钉拧入机械手的安装架固定边,并将正向螺钉拧入安装架正安装孔,由此实现对机械手和执行单元安装管之间的固定。在机械手驱动绳索和机械手弹簧的作用下可以对机械手的开合进行控制,当机械手驱动绳索对作动轴施加的牵引力大于机械手弹簧的弹力时,作动轴向下运动,机械手闭合;反之,则机械手打开。防开架弹簧两端分别插入执行单元安装管上的防开架弹簧安装孔和防开架底部的防开架弹簧安装槽内。防开架安装有防开架驱动绳索,通过防开架驱动绳索和防开架弹簧可以控制防开架的上下运动。当防开架驱动绳索对防开架的牵引力大于防开架弹簧的弹力时,防开架向下运动,对机械手没有锁定作用,保证其可以进行开合并完成夹持动作;反之,防开架向上运动,对闭合状态下的机械手进行抱紧,起到锁定作用,防止机械手在夹持住气囊式内窥机器人时因不确定因素而打开,以提高设备的可靠性。输气管穿过执行单元安装管底部的输气管通道后与防开架内部的防开架输气道相连,在防开架输气道的顶部还安装有充气嘴,用于与气囊式内窥机器人的气囊接嘴相连。wi-fi天线贴在执行单元安装管背侧的wi-fi天线安装槽,wi-fi天线导线穿过wi-fi天线过线孔向后延伸。wi-fi天线保护壳为非金属材质,覆盖在wi-fi天线表面后粘接于wi-fi天线安装槽,能够在对wi-fi天线起到保护作用的同时,不对wi-fi天线收发信号产生屏蔽。执行单元安装管底部设有关节安装边,用于与弯曲单元相连接。
10、所述的执行单元安装管底部的关节安装边和弯曲单元的顶部宽型关节之间采用环形关节和四个环形关节销轴进行连接,如图11所示。环形关节使得执行单元能够相对于弯曲单元进行两个旋转自由度的转动,该过程通过四根执行单元全向弯曲驱动绳索进行控制。对不同的驱动绳索施加牵引力,可以使不同驱动绳索与执行单元安装管连接的一端移动不同的距离,进而使得执行单元相对于弯曲单元发生绕两根轴的转动,并且靠转动的组合实现执行单元朝空间各方向的偏摆,使其对准气囊式内窥机器人,或者使机器人对准叶片之间的通道。
11、所述的弯曲单元装配过程如图12所示,顶部宽型关节和底部宽型关节沿周向以及中心位置附近开有若干关节绳孔、导线孔以及一个输气管孔,弯曲单元安装管沿周向开有若干安装管绳孔,来自前方的输气管、各驱动绳索、有线摄像头导线等管线可以穿过对应孔洞向后延伸。两根弯曲单元单向弯曲驱动绳索用于对弯曲单元的转动进行控制,其顶部的弯曲单元驱动绳帽为台阶形。弯曲单元驱动绳帽的上半圆柱插入弯曲单元安装管上的安装管绳帽孔,其中安装管绳帽孔的深度和弯曲单元驱动绳帽的上半圆柱高度相等。弯曲单元驱动绳帽的下半圆柱和弯曲单元单向弯曲驱动绳索一同穿过底部宽型关节上的关节绳孔,使得弯曲单元单向弯曲驱动绳索能够继续向后延伸。其中关节绳孔的直径要小于弯曲单元驱动绳帽的上半圆柱,这样使得弯曲单元驱动绳帽能够被固定在弯曲单元安装管和底部宽型关节之间,因而弯曲单元单向弯曲驱动绳索能够对弯曲单元施加牵引力。顶部宽型关节和底部宽型关节插入弯曲单元安装管的弯曲单元内管道后,通过弯曲单元关节固定销固定在弯曲单元安装管上。
12、所述的刚性段包括刚性直管和窄型关节等部件,窄型关节插入刚性段内管道后,通过刚性段关节固定销固定在刚性直管上,如图13所示。弯曲单元的底部宽型关节和刚性段的窄型关节通过单自由度关节销轴相连接。分别对两根弯曲单元单向弯曲驱动绳索施加牵引力,可以使得弯曲单元和刚性段在两个方向进行相对转动。与采用环形关节的连接形式相比,该种关节连接方式使得弯曲单元和刚性段只能够在一个自由度上发生相对转动,即蛇形臂的该部位只能在该方向上产生弯曲,适用于空间较为确定的环境,相应的控制关节转动时仅需要两根驱动绳索,结构和控制方式要比环形关节简单。弯曲单元内的wi-fi天线导线、弯曲单元单向弯曲驱动绳索、有线摄像头导线、机械手驱动绳索、执行单元全向弯曲驱动绳索以及输气管等管线继续在刚性直管内以及刚性段内管道中向后延伸,直至进入控制箱。
13、控制箱如图14所示,用于对蛇形臂、支撑和传动系统进行驱动和控制,并对一些重要信息通过屏幕或连接在外接显示设备接口上的外接设备进行显示,主要包括屏幕、箱盖、电路板、双绳绕线电机、单绳绕线电机、箱体、气泵模组和控制手柄等部件。屏幕用于显示蛇形臂的有线摄像头及led灯和气囊式内窥机器人采集到的图像,以及设备工作过程中的其他重要信息。屏幕的正面装有磁条,可以插入并吸附在箱盖上的屏幕固定槽内。箱盖另一侧通过电路板螺钉固定有电路板,电路板通过手柄接口、屏幕接口、外接设备显示接口等预留接口与其他电气设备相连,用于对各电气设备的启停和运行进行控制。
14、控制箱内部的执行装置主要包括三个双绳绕线电机、两个单绳绕线电机和一个气泵模组,安装在箱体的底部,结构如图15所示。双绳绕线电机头部安装有双线摆杆,其两端的摆杆转轴可以各固定一根驱动绳索,两根绳索在双线摆杆转动时分别进行收和放的动作,产生控制蛇形臂的弯曲的效果。单绳绕线电机与双绳绕线电机结构类似,不同点在于单绳绕线电机采用绕线盘代替双线摆杆,因此一个单绳绕线电机只能控制一根绳索。当该电机转动时,驱动绳索的另一端带动与之相连的执行结构进行作动。控制箱内共五个绕线电机,一个双绳绕线电机控制弯曲单元和刚性段之间的单自由度关节转动,另外两个双绳绕线电机共同控制环形关节的转动,两个单绳绕线电机分别控制机械手中手爪的开合和执行单元中防开架、充气嘴的作动。气泵模组用于向气囊式内窥机器人进行充气和放气。气泵上的输气接头、释压接头分别与输气管和大气相连通。
15、双绳绕线电机、单绳绕线电机和气泵模组在箱体内的排布如图16(a)和16(b)所示。双绳绕线电机和单绳绕线电机沿着箱体底面的中轴线两侧排列,并且每个电机的中轴线与箱体底面的中轴线成一定角度,以保证不同电机上的驱动绳索在工作时不会相互干扰。通过螺栓和螺母对蛇形臂的刚性段法兰边、分线盘与箱体进行固定。蛇形臂的驱动绳索、输气管、有线摄像头导线等管线穿过分线盘进入箱体内部。分线盘上开有若干孔洞,能够保证各管线在进入箱体时不会发生缠绕。不同的驱动绳索固定到对应的双线摆杆或绕绳盘上,输气管穿过输气管固定槽连接到阀门,并最终与气泵的输气接头相连。输气管固定槽能够保证输气管紧贴箱体底部,避免其干扰驱动绳索的工作。双绳绕线电机、单绳绕线电机和气泵的控制线以及来自蛇形臂上各电气设备的线路连接到电路板的指定引脚。
16、控制手柄外形如图17所示,设有摇杆、拨杆和控制按钮,能将操作者的对手柄的操作转化为控制信号,经电路板处理后使控制箱内的电机等执行装置进行作动,进而对整套设备进行控制。机械手拨杆、防开架拨杆、运动拨杆保险杆均有两个状态。其中机械手拨杆用于控制机械手的开合;防开架拨杆用于控制防开架对机械手闭合状态的锁定。摇杆可以全向拨动,不受力时回弹至中心位置,用于控制环形关节的双自由度转动。机械手拨杆和防开架拨杆分别配有机械手拨杆保险盖、防开架拨杆保险盖,以防止操作过程中的误触。控制箱中的阀门不工作时处于关闭状态,当充气嘴与气囊接嘴连通,气囊、充气嘴、防开架输气道、输气管、阀门以及气泵构成气体通道时,按下充气按钮,阀门打开,气泵可以对气囊进行充气。按下放气按钮时,阀门与大气连通,可以对气囊进行放气。运动拨杆有前进、后退、静止三个位置状态,用于控制支撑和传动系统的运动,不受外力时运动拨杆处于静止位置状态。运动拨杆保险杆有两个位置状态,当处于位置状态一时,运动拨杆的三个状态均不起作用,支撑和传动系统保持静止。当运动拨杆保险杆处于位置状态二时,运动拨杆按前述三个位置状态对支撑和传动系统进行控制:当操作者向前拨动运动拨杆时,支撑和传动系统工作,驱动控制箱向前运动;当操作者向后拨动运动拨杆时,控制箱向后运动;当操作者不对运动拨杆施加操作时,运动拨杆自动回中,控制箱保持在当前位置不动。
17、支撑和传动系统如图18所示,其作用是固定在发动机的外层机匣内窥孔堵盖安装座上,为控制箱提供安装平台,同时使安装有蛇形臂的控制箱可以在丝杠的驱动下沿着导轨前后移动,从而可以携带气囊式内窥机器人穿过机匣和叶片进出发动机内部。其结构包括法兰座、电源箱、电源、丝杠、导轨、滑块和轨道固定板等部件。
18、法兰座安装在发动机上的外层机匣内窥孔堵盖安装座上,为整个系统提供安装基础,并且使蛇形臂在不发生弯曲时对准外层机匣内窥孔。法兰座底部设有放置电源的电源箱,电源插口与控制箱内电路板上的电源接口相连,为控制箱的电机、气泵、屏幕、电路板等提供电源。电路板上的驱动电机接口与法兰座上的驱动电机插口相连,为驱动电机提供电源并传输控制信号。同时电路板还要为蛇形臂上的各电气设备供电。
19、驱动电机轴上装有主动齿轮,主动齿轮与螺纹杆上的从动齿轮相啮合。螺纹杆通过螺纹杆支撑块固定在法兰座中间的夹层内,驱动电机通过螺栓和螺母与电机固定板相固定,齿轮箱3407、电机固定板通过螺钉固定在法兰座上。由此可以通过驱动电机的转动带动螺纹杆转动,进而使滑块能够沿导轨前后移动。通过驱动电机的反馈信息,可以获得电机累计转动的角度,进而得到滑块在导轨上滑动的距离,当滑块初始位置已知时,就可以得到滑块工作过程任意时刻的位置,即判断蛇形臂插入发动机的深度,并以该数值和发动机结构为输入,确定蛇形臂的弯曲时机和幅度。将滑块与控制箱通过螺钉固定后,通过控制手柄可以使安装有蛇形臂的控制箱沿导轨移动或固定在某一位置。
20、本发明采用上述技术方案与现有技术相比,具有以下技术效果:
21、1、抓取装置强度和执行功能增加
22、现有内窥镜的抓取装置抓取力度低,并且没有锁紧装置,容易在携带抓取物运动的过程中意外打开,导致抓取物脱落,给发动机带来安全隐患。并且传统内窥镜的抓取装置只能对简单结构的物体进行抓取和释放的操作,功能比较单一。该蛇形臂机械手可以对特定的具有复杂结构的气囊式内窥机器人进行夹持并进行锁紧,保证机械手闭合后不会因为磕碰等意外因素而打开,提高了安全性。同时该蛇形臂机械手能够在夹持住气囊式内窥机器人的同时对其进行充放气操作,辅助机器人在发动机中实现固定和松脱。并且针对发动机内空间狭窄以及机器人尺寸微小等问题,该抓取装置结构紧凑,对空间利用率高,可实现以较少零件完成复杂动作。
23、2、通过少数关节实现可控弯曲
24、传统内窥镜的导线为半刚性弯折,由于缺少关节而不能进行弯曲度的精确控制。在插入发动机后,会在自身刚度、重力和周围环境的阻挡下自然弯曲,对其弯曲的控制只能凭借人工粗略调整,无法准确的到达操作者预期的位置。特别是面向发动机多层机匣和多排叶片的使用环境,使得此类非可控导线无法穿过。而已有的蛇形内窥镜虽然可控程度高,但是关节数量多,结构复杂,因此带来控制过程困难、可靠性差、成本高等问题。本发明中的蛇形臂由一个单自由度关节和一个两自由度关节组成,关节的弯曲幅度和方向可通过驱动模组进行精确控制,既使得蛇形臂能够穿过发动机机匣和叶珊,将机器人送入和取出,又降低了结构的复杂性和控制难度,提高了控制过程的可靠性,降低了装置成本。
25、3、使新的内窥方法得以实现,消除已有内窥方法盲区
26、已有内窥镜在对涡轮发动机进行内窥检查时,需要进行内窥的区域约有40%无法观察到,而气囊式内窥机器人的使用可以消除该部分盲区。该蛇形臂机械手借助特定的执行装置和可控的弯曲过程,能够将此类气囊式内窥机器人送入或取出发动机内部,并辅助气囊式内窥机器人与叶片相固定或者脱离,此过程中通过蛇形臂顶部的摄像头可以观察气囊式内窥机器人与叶片的相对位置,提高放置或抓取的准确率。该蛇形臂系统具有无线收发功能,因此能够实时接收气囊式内窥机器人工作过程中采集到的图像数据。上述设计使得采用气囊式内窥机器人进行内窥工作的原理得以实现。
27、4、对发动机无破坏
28、该蛇形臂机械手携带气囊式内窥机器人通过发动机预设的内窥孔进出发动机内部,这一过程中对发动机零部件的拆卸仅限制在内窥孔附近。在蛇形臂将气囊式内窥机器人送入发动机内部后,气囊式内窥机器人的工作过程也不会对周围结构造成破坏。由于该蛇形臂机械手使内窥覆盖率达到100%的内窥方法得以实现,因此也避免了因存在内窥盲区而带来的拆卸过程。所以整个内窥过程只需要打开发动机的一小部分结构,对发动机整体不造成影响,避免了因大范围拆卸可能带来的不可逆损伤,保证了装备的完好率和出勤率。
29、5、操作简单
30、由于进行内窥作业时的发动机型号和蛇形臂的位置已知,因此基于这些已知条件,可以完成控制规律的设计,使得蛇形臂在插入发动机内部的过程中,单自由度的关节能够随蛇形臂进入发动机深度依据预设程序自行转动适当角度。操作人员只需通过vr眼镜或屏幕的反馈,利用控制手柄对环形关节的转动进行调整,使得整个系统工作过程中的所有操作,通过操作者单手操作控制手柄即可完成对整个机械臂进出、弯曲,和机械手开合、锁紧,以及充放气等操作,降低了操作难度。
- 还没有人留言评论。精彩留言会获得点赞!