车辆电动尾门防夹方法、装置、计算机设备及存储介质与流程
本发明涉及车辆控制,尤其涉及一种车辆电动尾门防夹方法、装置、计算机设备及存储介质。
背景技术:
1、随着汽车电子技术的不断发展和进步,人类生活水平的不断提高,现代汽车更注重车辆的舒适性和安全性,同时也推动了传统汽车控制系统的电子化、智能化发展。电动尾门也因此应运而生,电动尾门以及其简单便捷的操作受到了越来越多用户的追捧,用户只需通过按键或者遥控便可控制汽车尾门自动开启和关闭,以及停到用户觉得适合的高度。当然,安全的重要性不言而喻,对于用户而言,电动尾门防夹功能是他们最关心的一点。
2、一般的防夹算法会通过采集电流值并与预设电流阈值进行比较,或者通过霍尔脉冲宽度与预设霍尔脉冲宽度进行比较来判断是否遇到障碍物,驱使尾门进行停止或反转,从而起到安全防护的作用。然而,这两种传统单一的防夹算法并不能对防夹效果起到一个很好的作用。而且,电动尾门在不同温度、坡度等不同环境下的电流是不同的,仅仅是通过比较某一阈值的方法并不能对防夹起到很好的效果,同时也更容易发生误判,防夹效果大打折扣,对用户安全也存在潜在威胁。
技术实现思路
1、本发明实施例的目的在于提出一种车辆电动尾门防夹方法、装置、计算机设备及存储介质,以解决现有技术中车辆尾门防夹算法存在误判的现象,防夹效果大打折扣,对用户安全也存在潜在威胁的问题。
2、为了解决上述技术问题,本发明提供一种车辆电动尾门防夹方法,采用了如下所述的技术方案,包括:
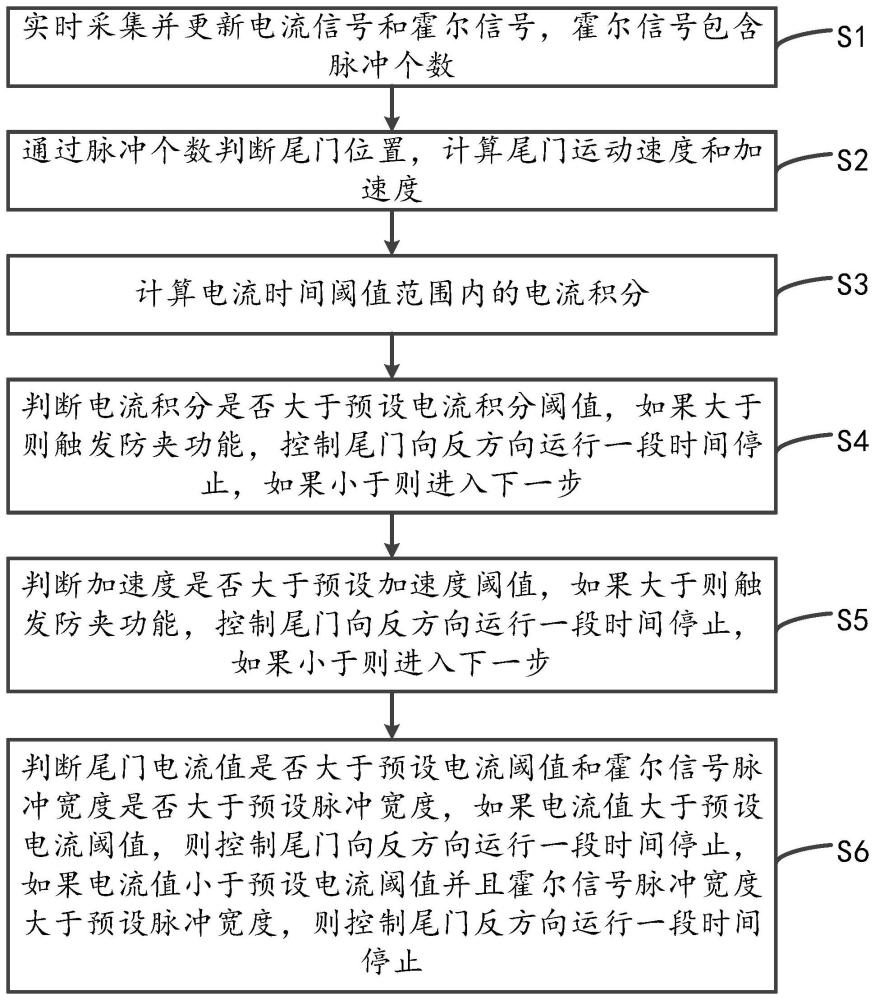
3、实时采集并更新电流信号和霍尔信号,所述霍尔信号包含脉冲个数;
4、通过所述脉冲个数判断所述尾门位置,计算所述尾门运动速度和加速度;
5、计算电流时间阈值范围内的电流积分;
6、判断所述电流积分是否大于预设电流积分阈值,如果大于则触发防夹功能,控制所述尾门向反方向运行一段时间停止,如果小于则进入下一步;
7、判断所述加速度是否大于预设加速度阈值,如果大于则触发防夹功能,控制所述尾门向反方向运行一段时间停止,如果小于则进入下一步;
8、判断所述尾门电流值是否大于预设电流阈值和霍尔信号脉冲宽度是否大于预设脉冲宽度,如果电流值大于预设电流阈值,则控制所述尾门向反方向运行一段时间停止,如果电流值小于预设电流阈值并且霍尔信号脉冲宽度大于预设脉冲宽度,则控制所述尾门反方向运行一段时间停止。
9、优选地,所述实时采集并更新电流信号和霍尔信号,所述霍尔信号包含脉冲个数的步骤具体包括:
10、将电流传感器和霍尔传感器安装在车辆电动尾门的电机上;
11、设置电流传感器和霍尔传感器的采样频率,设置主控制器的数据传输速率;
12、当车辆电动尾门工作时,电流传感器和霍尔传感器不断地采集信号,并将信号传输到主控制器。
13、优选地,所述通过所述脉冲个数判断所述尾门位置,计算所述尾门运动速度和加速度的步骤具体包括:
14、确定霍尔脉冲的基准位置;
15、使用霍尔脉冲判断尾门位置;
16、计算尾门运动速度和加速度。
17、优选地,所述计算电流时间阈值范围内的电流积分的步骤具体包括:
18、处理电流数据;
19、设定电流时间阈值;
20、计算电流积分;
21、分析电流积分结果。
22、优选地,所述判断所述电流积分是否大于预设电流积分阈值,如果大于则触发防夹功能,控制所述尾门向反方向运行一段时间停止,如果小于则进入下一步的步骤具体包括:
23、判断所述电流积分是否大于预设电流积分阈值,如果大于则控制电机驱动器运转,实现尾门的反向运动,并且开启定时器,定时器用于对电机反向运转计时;
24、当电机反向运转计时时间达到反向运转时间阈值时,则由电机驱动器控制电机停止运转。
25、优选地,所述判断所述加速度是否大于预设加速度阈值,如果大于则触发防夹功能,控制所述尾门向反方向运行一段时间停止,如果小于则进入下一步的步骤具体包括:
26、判断所述电流积分是否大于预设电流积分阈值,如果大于则控制电机驱动器运转,实现尾门的反向运动,并且开启定时器,定时器用于对电机反向运转计时;
27、当电机反向运转计时时间达到反向运转时间阈值时,则由电机驱动器控制电机停止运转。
28、优选地,所述判断所述尾门电流值是否大于预设电流阈值和霍尔信号脉冲宽度是否大于预设脉冲宽度,如果电流值大于预设电流阈值,则控制所述尾门向反方向运行一段时间停止,如果电流值小于预设电流阈值并且霍尔信号脉冲宽度大于预设脉冲宽度,则控制所述尾门反方向运行一段时间停止的步骤具体包括:
29、判断如果电流值大于预设电流阈值或者如果电流值小于预设电流阈值并且霍尔信号脉冲宽度大于预设脉冲宽度,则控制电机驱动器运转,实现尾门的反向运动,并且开启定时器,定时器用于对电机反向运转计时;
30、当电机反向运转计时时间达到反向运转时间阈值时,则由电机驱动器控制电机停止运转。
31、为了解决上述技术问题,本发明还提供一种车辆电动尾门防夹装置,采用了如下所述的技术方案,包括:
32、采集模块,用于实时采集并更新电流信号和霍尔信号,所述霍尔信号包含脉冲个数;
33、第一计算模块,用于通过所述脉冲个数判断所述尾门位置,计算所述尾门运动速度和加速度;
34、第二计算模块,用于计算电流时间阈值范围内的电流积分;
35、第一防夹模块,用于判断所述电流积分是否大于预设电流积分阈值,如果大于则触发防夹功能,控制所述尾门向反方向运行一段时间停止,如果小于则进入下一步;
36、第二防夹模块,用于判断所述加速度是否大于预设加速度阈值,如果大于则触发防夹功能,控制所述尾门向反方向运行一段时间停止,如果小于则进入下一步;
37、第三防夹模块,用于判断所述尾门电流值是否大于预设电流阈值和霍尔信号脉冲宽度是否大于预设脉冲宽度,如果电流值大于预设电流阈值,则控制所述尾门向反方向运行一段时间停止,如果电流值小于预设电流阈值并且霍尔信号脉冲宽度大于预设脉冲宽度,则控制所述尾门反方向运行一段时间停止。
38、为了解决上述技术问题,本发明还提供一种计算机设备,采用了如下所述的技术方案,包括存储器和处理器,所述存储器中存储有计算机可读指令,所述处理器执行所述计算机可读指令时实现上述的车辆电动尾门防夹方法的步骤。
39、为了解决上述技术问题,本发明还提供一种计算机可读存储介质,采用了如下所述的技术方案,所述计算机可读存储介质上存储有计算机可读指令,所述计算机可读指令被处理器执行时实现上述的车辆电动尾门防夹方法的步骤。
40、与现有技术相比,本发明主要有以下有益效果:通过首先实时采集并更新电流信号和霍尔信号,霍尔信号包含脉冲个数;再通过脉冲个数判断尾门位置,计算尾门运动速度和加速度;然后计算电流时间阈值范围内的电流积分;再判断电流积分是否大于预设电流积分阈值,如果大于则触发防夹功能,控制尾门向反方向运行一段时间停止,如果小于则进入下一步;再进一步判断加速度是否大于预设加速度阈值,如果大于则触发防夹功能,控制尾门向反方向运行一段时间停止,如果小于则进入下一步;最后进一步判断尾门电流值是否大于预设电流阈值和霍尔信号脉冲宽度是否大于预设脉冲宽度,如果电流值大于预设电流阈值,则控制尾门向反方向运行一段时间停止,如果电流值小于预设电流阈值并且霍尔信号脉冲宽度大于预设脉冲宽度,则控制尾门反方向运行一段时间停止,通过三次判断具体环境下的电流信号和霍尔信号具体状态,能够更加有效满足电动尾门的防夹功能安全要求,确保电动尾门防夹功能更加安全、更加可靠,从而保护用户的人身安全。
- 还没有人留言评论。精彩留言会获得点赞!