一种无线信号侦测设备安装机器人的制作方法
本发明属于机器人,尤其涉及一种无线信号侦测设备安装机器人。
背景技术:
1、随着无人机技术的发展,使得国家军事安全、民航安全以及一些需要保密的单位如监狱的安全受到严重威胁。在进行无人机反制设备安装时,需要在墙体的外侧安装一些无线信号侦测设备,以提高无人机侦测能力,便于实时监测周围是否有无人机出现。
2、现有在安装无线信号侦测设备时,需要安装人员降落到安装墙体的外侧进行施工,高空施工危险性极高,且较为麻烦。市场上虽然出现了一些能够进行爬墙的机器人,但是这些爬墙机器人功能单一,只能进行简单的清洗作业,不具有自动安装无线信号侦测设备的功能,例如申请号为201610748348.8的中国发明专利所示的。因此,亟需设计一种能够将无线信号侦测设备安装到墙体的爬墙机器人。
技术实现思路
1、有鉴于此,本发明的目的是提供一种无线信号侦测设备安装机器人,解决现有爬墙机器人无法进行安装无线信号侦测设备的问题。
2、本发明通过以下技术手段解决上述技术问题:
3、一种无线信号侦测设备安装机器人,包括躯干以及设置于躯干底部的多个行走臂,行走臂的尾端可拆卸连接有真空吸盘,躯干的底部设有安装机构,安装机构位于多个行走臂的中部;安装机构包括设置于躯干底部的电动推杆,躯干的底部还设有环绕在电动推杆四周的伸缩杆,伸缩杆的尾端共同连接有底板,底板远离伸缩杆的一侧对称设置有夹紧组件,夹紧组件之间夹持有收纳无线信号侦测设备的收纳盒,收纳盒的背面设有粘墙胶,底板的中部设有通孔,电动推杆的尾端穿过通孔,电动推杆的尾端端部设有抵块,抵块的横截面大于通孔的孔径。
4、在上述技术方案的基础上,本发明还进行了以下改进:
5、进一步,两个夹紧组件之间固定连接有支撑件,支撑件的中部设有向上拱起的拱架,拱架的顶部为平面状。
6、进一步,夹紧组件包括固定在底板上的齿轮箱,齿轮箱内轴承连接有至少三个传动轮以及一个主动轮,三个传动轮直线排列,且相邻两个传动轮之间相互啮合,其中一个传动轮与主动轮相互啮合,齿轮箱朝外的侧壁设置有用于驱动主动轮转动的电控马达,齿轮箱朝内的侧壁设置有与传动轮同轴连接的螺杆,每个传动轮均连接有一个螺杆,上下相邻两个螺杆的螺纹方向相反,螺杆上螺纹连接有螺套,多个螺套共同连接有一个夹板。
7、进一步,齿轮箱内轴承连接有从动轮,齿轮箱朝内的侧壁设有与从动轮同轴连接的收线棒,齿轮箱朝内的侧壁设有滑槽,两个齿轮箱之间连接有撕膜杆,撕膜杆的端部与滑槽滑动连接,撕膜杆通过牵引绳与收线棒连接。可以在粘贴之前再撕掉保护膜,粘墙胶在空气中停留的时间会比较短,粘性保留的会更好,粘贴更加牢固。
8、进一步,撕膜杆包括杆体和嵌体,杆体上设有用于安装嵌体的安装槽,嵌体通过螺纹插销固定在安装槽中,杆体的两端设有滑杆,滑杆与滑槽滑动连接。
9、进一步,躯干的顶部设有监控摄像头,监控摄像头通过转杆与躯干的顶部转动连接,监控摄像头与转杆的顶部轴承连接。
10、进一步,行走臂的数量至少为六个,行走臂包括第一连接臂和第二连接臂,第一连接臂与第二连接臂转动连接,躯干的边缘设有用于控制第一连接臂以及第二连接臂转动的舵机。
11、进一步,收纳盒包括盒体,盒体远离粘墙胶的一侧设有用于安装无线信号侦测设备的滑道,盒体的顶部为开口设置,盒体的底部设有沥水孔。
12、本发明的有益效果:当电动推杆收缩时,抵块会卡在底板的下方,随着电动推杆的收缩,抵块能够带动底板向上移动,此时伸缩杆自动缩短,在夹紧组件的夹持配合下,能够将收纳盒收紧在底板的底部;电动推杆伸长时,抵块在电动推杆的推动下会推动装有无线信号侦测设备的收纳盒移动,此过程中,伸缩杆会随着底板自动伸长,配合着爬墙机器人现有的爬墙技术,通过在无线信号侦测设备的背部设置粘墙胶,从而能够全自动化的将收纳盒粘贴在墙体上。
技术特征:
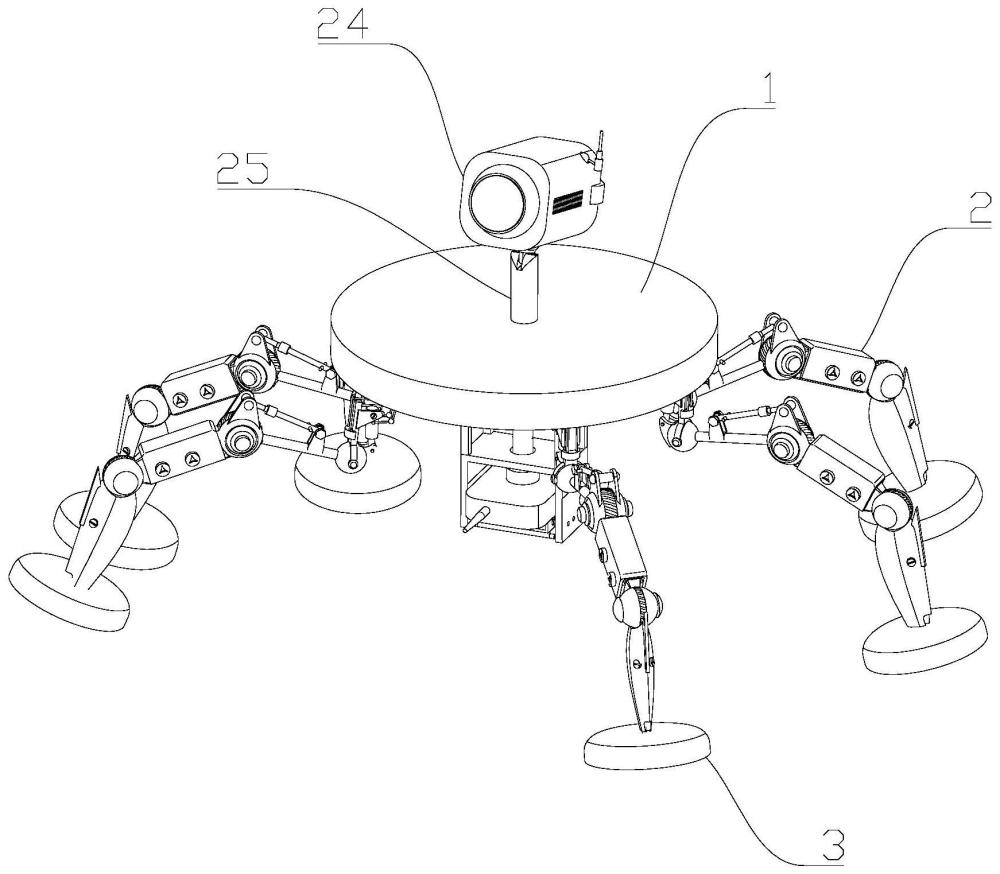
1.一种无线信号侦测设备安装机器人,包括躯干(1)以及设置于所述躯干(1)底部的多个行走臂(2),所述行走臂(2)的尾端可拆卸连接有真空吸盘(3),其特征在于:所述躯干(1)的底部设有安装机构,安装机构位于多个所述行走臂(2)的中部;
2.根据权利要求1所述的一种无线信号侦测设备安装机器人,其特征在于:两个所述夹紧组件之间固定连接有支撑件(9),所述支撑件(9)的中部设有向上拱起的拱架,所述拱架的顶部为平面状。
3.根据权利要求2所述的一种无线信号侦测设备安装机器人,其特征在于:所述夹紧组件包括固定在所述底板(6)上的齿轮箱(10),所述齿轮箱(10)内轴承连接有至少三个传动轮(11)以及一个主动轮(12),三个所述传动轮(11)直线排列,且相邻两个传动轮(11)之间相互啮合,其中一个传动轮(11)与所述主动轮(12)相互啮合,所述齿轮箱(10)朝外的侧壁设置有用于驱动所述主动轮(12)转动的电控马达(13),所述齿轮箱(10)朝内的侧壁设置有与所述传动轮(11)同轴连接的螺杆(14),每个所述传动轮(11)均连接有一个螺杆(14),上下相邻两个螺杆(14)的螺纹方向相反,所述螺杆(14)上螺纹连接有螺套(15),多个所述螺套(15)共同连接有一个夹板(16)。
4.根据权利要求3所述的一种无线信号侦测设备安装机器人,其特征在于:所述齿轮箱(10)内轴承连接有从动轮(17),所述齿轮箱(10)朝内的侧壁设有与所述从动轮(17)同轴连接的收线棒(18),所述齿轮箱(10)朝内的侧壁设有滑槽,两个所述齿轮箱(10)之间连接有撕膜杆(19),所述撕膜杆(19)的端部与滑槽滑动连接,所述撕膜杆(19)通过牵引绳(20)与所述收线棒(18)连接。
5.根据权利要求4所述的一种无线信号侦测设备安装机器人,其特征在于:所述撕膜杆(19)包括杆体(21)和嵌体(22),所述杆体(21)上设有用于安装所述嵌体(22)的安装槽,所述嵌体(22)通过螺纹插销固定在所述安装槽中,所述杆体(21)的两端设有滑杆(23),所述滑杆(23)与滑槽滑动连接。
6.根据权利要求1所述的一种无线信号侦测设备安装机器人,其特征在于:所述躯干(1)的顶部设有监控摄像头(24),所述监控摄像头(24)通过转杆(25)与所述躯干(1)的顶部转动连接,所述监控摄像头(24)与所述转杆(25)的顶部轴承连接。
7.根据权利要求1所述的一种无线信号侦测设备安装机器人,其特征在于:所述行走臂(2)的数量至少为六个,所述行走臂(2)包括第一连接臂(26)和第二连接臂(27),所述第一连接臂(26)与所述第二连接臂(27)转动连接,所述躯干(1)的边缘设有用于控制所述第一连接臂(26)以及所述第二连接臂(27)转动的舵机(28)。
8.根据权利要求1所述的一种无线信号侦测设备安装机器人,其特征在于:所述收纳盒(7)包括盒体,盒体远离粘墙胶的一侧设有用于安装无线信号侦测设备的滑道,盒体的顶部为开口设置,盒体的底部设有沥水孔。
技术总结
本发明属于机器人技术领域,具体涉及一种无线信号侦测设备安装机器人,包括躯干以及设置于躯干底部的多个行走臂,行走臂的尾端可拆卸连接有真空吸盘,躯干的底部设有安装机构,安装机构位于多个行走臂的中部;安装机构包括设置于躯干底部的电动推杆,躯干的底部还设有环绕在电动推杆四周的伸缩杆,伸缩杆的尾端共同连接有底板,底板远离伸缩杆的一侧对称设置有夹紧组件,夹紧组件之间夹持有收纳无线信号侦测设备的收纳盒,收纳盒的背面设有粘墙胶,底板的中部设有通孔,电动推杆的尾端穿过通孔,电动推杆的尾端端部设有抵块,抵块的横截面大于通孔的孔径,用于解决现有爬墙机器人无法进行安装无线信号侦测设备的问题。
技术研发人员:田真真,吴永梅,张龙,冉一星
受保护的技术使用者:重庆兰空无人机技术有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!