四轴机器人的工具坐标定位方法、机器人及存储介质与流程
本发明涉及自动化控制,尤其涉及一种四轴机器人的工具坐标定位方法、机器人及存储介质。
背景技术:
1、机器人坐标系主要分为关节坐标系、直角坐标系、工具坐标系和用户坐标系。其中,工具坐标系是相对于机器人的末端执行器来定义的坐标系,是用于描述机器人末端执行器相对于机器人基座坐标系的准确位置和姿态,以便在机器人进行操作时,能够精确地控制末端执行器的位置和姿态。
2、机器人在出厂时都有一个默认的工具坐标系(简称tool0),位置在法兰末端中心。但机器人的机械臂在实际运动中往往会在法兰末端中心安装吸盘、焊枪、气缸等工具作为末端执行器,用于执行不同的任务和操作。例如,安装吸盘可以实现物体抓取和搬运,安装焊枪可以进行焊接操作,安装气缸可以实现夹持和压紧。此时,末端执行器的作业中心点与法兰末端中心可能会存在位置和姿态上的偏差,为了确保机器人能够准确执行任务,需要重新确定工具坐标。
3、在相关技术中,由标定人员将安装在机器人的法兰末端的末端执行器移动至标定针尖端参考点,标定针尖端参考点对应不同的姿态,例如水平旋转0度,正60度,负60度。并以tool0为参考坐标系,控制末端执行器夹持标定件,示教预先设定的基准点,从而根据标定件位置与基准点之间的偏差,重新确定工具坐标。然而,基于上述方法确定的工具坐标的精度取决于标定针加工精度和不同标定人员的人眼目视精度,导致工具坐标的精度低。
4、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明实施例通过提供一种四轴机器人的工具坐标定位方法、终端设备及计算机可读存储介质,旨在解决工具坐标精度低技术问题。
2、为实现上述目的,本发明实施例提供一种四轴机器人的工具坐标定位方法,所述四轴机器人的工具坐标定位方法包括以下:
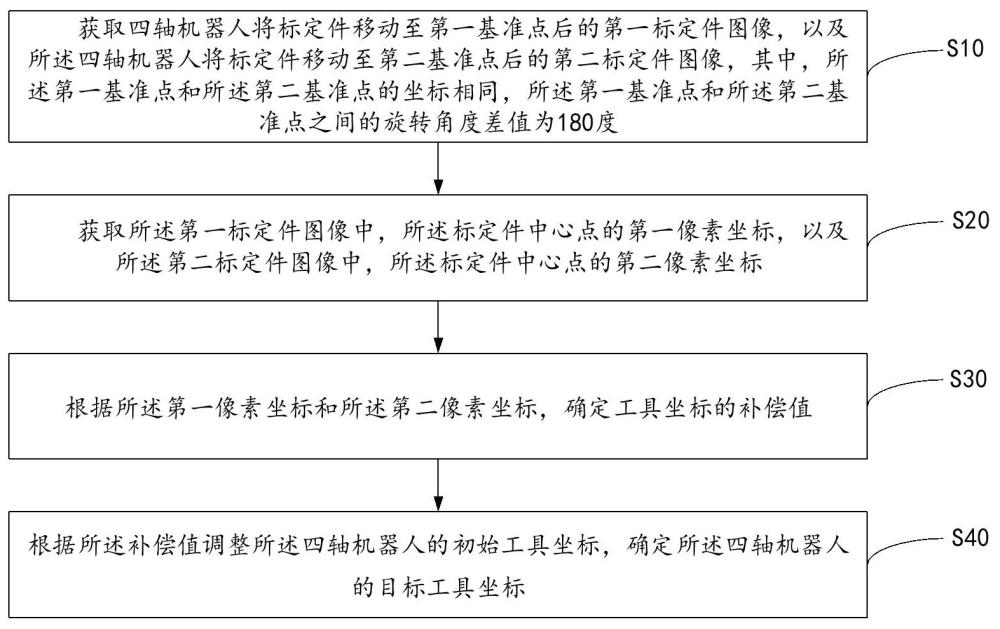
3、获取四轴机器人将标定件移动至第一基准点后的第一标定件图像,以及所述四轴机器人将标定件移动至第二基准点后的第二标定件图像,其中,所述第一基准点和所述第二基准点的坐标相同,所述第一基准点和所述第二基准点之间的旋转角度差值为180度;
4、获取所述第一标定件图像中,所述标定件中心点的第一像素坐标,以及所述第二标定件图像中,所述标定件中心点的第二像素坐标;
5、根据所述第一像素坐标和所述第二像素坐标,确定工具坐标的补偿值;
6、根据所述补偿值调整所述四轴机器人的初始工具坐标,确定所述四轴机器人的目标工具坐标。
7、可选地,所述获取四轴机器人将标定件移动至第一基准点后的第一标定件图像,以及所述四轴机器人将标定件移动至第二基准点后的第二标定件图像的步骤之前包括:
8、确定所述四轴机器人的法兰末端中心与末端执行器中心的相对位置偏差;
9、根据所述相对位置偏差,确定所述四轴机器人的所述初始工具坐标。
10、可选地,所述确定所述四轴机器人的法兰末端中心与末端执行器中心的相对位置偏差的步骤,包括:
11、获取所述四轴机器人的第一机构图,以及获取所述末端执行器的第二机构图;
12、根据所述第一机构图以及所述第二机构图,确定所述四轴机器人的法兰末端中心与所述末端执行器中心的相对位置偏差;
13、根据所述相对位置偏差,确定所述四轴机器人的所述初始工具坐标。
14、可选地,所述根据所述第一像素坐标和所述第二像素坐标,确定工具坐标的补偿值的步骤,包括:
15、确定所述第一像素坐标和所述第二像素坐标的差值;
16、根据所述差值确定工具坐标的初始补偿值;
17、根据所述初始补偿值的映射关系,确定工具坐标的所述补偿值。
18、可选地,所述根据所述差值确定工具坐标的初始补偿值的步骤之后包括:
19、确定所述初始补偿值是否在预设偏差范围;
20、若所述初始补偿值不在预设偏差范围,执行所述根据所述初始补偿值的映射关系,确定工具坐标的所述补偿值的步骤;
21、若所述初始补偿值在所述预设偏差范围时,将所述初始工具坐标确定为所述四轴机器人的目标工具坐标。
22、可选地,所述根据所述补偿值调整所述四轴机器人的初始工具坐标,确定所述四轴机器人的目标工具坐标的步骤之后,还包括:
23、继续执行预设次数的所述获取四轴机器人将标定件移动至第一基准点后的第一标定件图像,以及所述四轴机器人将标定件移动至第二基准点后的第二标定件图像的步骤,并获取与所述预设次数对应的各个初始补偿值;
24、当存在预设数量的所述初始补偿值不在所述预设偏差范围时,继续执行所述根据所述初始补偿值的映射关系,确定工具坐标的所述补偿值的步骤;
25、当各个所述初始补偿值均在所述预设偏差范围时,结束执行所述根据所述初始补偿值的映射关系,确定工具坐标的所述补偿值的步骤。
26、可选地,所述获取四轴机器人将标定件移动至第一基准点后的第一标定件图像,以及所述四轴机器人将标定件移动至第二基准点后的第二标定件图像的步骤,包括:
27、控制所述四轴机器人的末端执行器将所述标定件移动至所述第一基准点;
28、基于图像采集装置,获取所述四轴机器人的末端执行器将所述标定件移动至所述第一基准点后的第一标定件图像;
29、控制所述四轴机器人的末端执行器将所述标定件移动至所述第二基准点;
30、基于所述图像采集装置,获取所述四轴机器人的末端执行器将所述标定件移动至所述第二基准点后的第二标定件图像。
31、可选地,所述基于图像采集装置,获取所述四轴机器人的末端执行器将所述标定件移动至所述第一基准点后的第一标定件图像的步骤之前,和/或所述基于所述图像采集装置,获取所述四轴机器人的末端执行器将所述标定件移动至所述第二基准点后的第二标定件图像的步骤之前还包括:
32、在接收到撤离指令时,确定所述撤离指令对应的安全位置;
33、控制所述四轴机器人释放所述标定件,并移动至所述撤离指令对应的安全位置。
34、此外,本发明为实现上述目的,本发明还提供一种四轴机器人,所述四轴机器人包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的四轴机器人的工具坐标定位程序,所述四轴机器人的工具坐标定位程序被所述处理器执行时实现如上所述的四轴机器人的工具坐标定位方法的步骤。
35、此外,本发明为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有四轴机器人的工具坐标定位程序,所述四轴机器人的工具坐标定位程序被处理器执行时实现如上所述的四轴机器人的工具坐标定位方法的步骤。
36、本发明一实施例提出的一种四轴机器人的工具坐标定位方法,终端设备及计算机可读存储介质,通过获取四轴机器人将标定件移动至第一基准点后的第一标定件图像,以及所述四轴机器人将标定件移动至第二基准点后的第二标定件图像,其中,第一基准点和第二基准点的坐标相同,第一基准点和第二基准点之间的旋转角度差值为180度,然后获取第一标定件图像中,标定件中心点的第一像素坐标,以及第二标定件图像中,标定件中心点的第二像素坐标,通过根据第一像素坐标和第二像素坐标,确定工具坐标的补偿值,从而根据补偿值调整四轴机器人的初始工具坐标,确定四轴机器人的目标工具坐标。本发明通过识别标定件图像中标定件中心点的像素坐标,基于像素坐标确定工具坐标的补偿值,对标定件的精度无要求,且定位过程无需人工参与,能够提高工具坐标的精度。
- 还没有人留言评论。精彩留言会获得点赞!