一种小型起重机器人
本发明属于机器人,更具体地,涉及一种小型起重机器人。
背景技术:
1、地震等事故中,往往伴随着房屋、墙壁的坍塌,极容易造成伤员的掩埋事故,此时,需要消防救援人员执行深入危险场景、搬离重物、营救伤员等一系列危险操作。在复杂、危险的场景下,救援成功率低、危险性高。在近年来的地震救援任务中,多次出现了墙壁二次坍塌造成救援人员伤亡以及无法处理倒塌墙壁对伤员进行截肢等事故。
2、消防上主要采用人工的方式将起重垫安放于需要抬起的区域,再对起重垫进行充气的方式。然而,人工作业危险性高,同时无法将起重垫安置于远距离、狭窄空间等复杂地域,使用上存在较大限制。
技术实现思路
1、发明目的:针对现有技术的以上缺陷或改进需求,本发明提供了一种小型起重机器人,该发明能够完成狭窄、复杂环境下倒落墙壁等的的起重工作,为消防、救援工作提供支持。
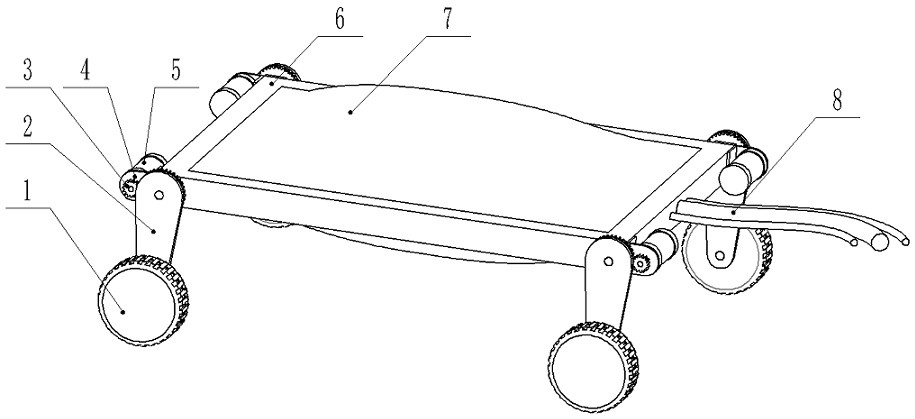
2、技术方案:本发明所述的一种小型起重机器人,包括轮毂电机、支撑腿、主动齿轮、腿部驱动电机、机架、起重气垫,所述轮毂电机、支撑腿、主动齿轮、腿部驱动电机分别安装于机架的四角,所述支撑腿的一端与所述轮毂电机连接,所述支撑腿的另一端与所述主动齿轮啮合,所述主动齿轮安装在所述腿部驱动电机的动力输出轴上,所述机架上安装有所述起重气垫。
3、在一些实施方式中,所述腿部驱动电机通过电机安装架固定安装在所述机架上。
4、在一些实施方式中,所述支撑腿通过支撑腿安装架安装在所述机架上。
5、在一些实施方式中,所述电机安装架、支撑腿安装架的宽度与机架的高度相同。
6、在一些实施方式中,所述支撑腿为l型结构,包括大、小两端。
7、在一些实施方式中,所述起重气垫在未充气状态下为长方体结构,起重气垫的外尺寸与机架的内尺寸相同,起重气垫的四条边安装与机架内层的四条边上。
8、在一些实施方式中,还包括连接线缆,所述连接线缆包括供气线、供电线和控制线。
9、在一些实施方式中,所述小型起重机器人在正常行进过程中,支撑腿与机架可保持任意角度,轮毂电机的直径略大于起重气垫在未充气状态下的厚度,起重气垫在未充气状态下的厚度略大于机架的高度。
10、在一些实施方式中,执行起重任务过程中,支撑腿平行于水平面放置,由外部向起重气垫供气,随着起重气垫内部气体压力的增加,其竖直方向上的高度逐渐提高,并大于轮毂电机的直径,此时,被支撑的对象在起重气垫的作用下抬起。
11、有益效果:本发明的有益效果如下:
12、(1)支撑腿为l形结构,含大、小两端。其中,大端具有齿轮,与主动齿轮啮合,腿部驱动电机的动力经由主动齿轮传递给支撑腿;同时,由于支撑腿、轮毂电机等均安装与机架的外侧,使得支撑腿可实现360°的旋转;
13、(2)主动齿轮的齿数少于支撑腿上齿轮的齿数,可对腿部驱动电机的动力起到降低转速、增加扭矩的作用,支撑腿小端安装轮毂电机;
14、(3)小型起重机器人的4个轮毂电机、4条支撑腿分别独立控制,在平坦地域前进时,支撑腿不动,轮毂电机运动;在翻越障碍物等复杂地形条件时,可通过腿部驱动电机驱动支撑腿的旋转进行越障,由于四条支撑腿可分别绕各自的旋转轴进行360°旋转,机器人具有较高的复杂地形通过能力;
15、(4)小型起重机器人在到达任务地点后,支撑腿平行于水平面放置,由外部向起重气垫供气,随着起重气垫内部气体压力的增加,其竖直方向上的高度逐渐提高,并大于轮毂电机的直径。此时,被支撑的对象在起重气垫的作用下抬起。
技术特征:
1.一种小型起重机器人,其特征在于:包括轮毂电机、支撑腿、主动齿轮、腿部驱动电机、机架、起重气垫,所述轮毂电机、支撑腿、主动齿轮、腿部驱动电机分别安装于机架的四角,所述支撑腿的一端与所述轮毂电机连接,所述支撑腿的另一端与所述主动齿轮啮合,所述主动齿轮安装在所述腿部驱动电机的动力输出轴上,所述机架上安装有所述起重气垫。
2.根据权利要求1所述的一种小型起重机器人,其特征在于:所述腿部驱动电机通过电机安装架固定安装在所述机架上。
3.根据权利要求2所述的一种小型起重机器人,其特征在于:所述支撑腿通过支撑腿安装架安装在所述机架上。
4.根据权利要求3所述的一种小型起重机器人,其特征在于:所述电机安装架、支撑腿安装架的宽度与机架的高度相同。
5.根据权利要求1所述的一种小型起重机器人,其特征在于:所述支撑腿为l型结构,包括大、小两端。
6.根据权利要求1所述的一种小型起重机器人,其特征在于:所述起重气垫在未充气状态下为长方体结构,起重气垫的外尺寸与机架的内尺寸相同,起重气垫的四条边安装与机架内层的四条边上。
7.根据权利要求1所述的一种小型起重机器人,其特征在于:还包括连接线缆,所述连接线缆包括供气线、供电线和控制线。
8.根据权利要求1所述的一种小型起重机器人,其特征在于:所述小型起重机器人在正常行进过程中,支撑腿与机架可保持任意角度,轮毂电机的直径略大于起重气垫在未充气状态下的厚度,起重气垫在未充气状态下的厚度略大于机架的高度。
9.根据权利要求1所述的一种小型起重机器人,其特征在于:执行起重任务过程中,支撑腿平行于水平面放置,由外部向起重气垫供气,随着起重气垫内部气体压力的增加,其竖直方向上的高度逐渐提高,并大于轮毂电机的直径,此时,被支撑的对象在起重气垫的作用下抬起。
技术总结
本发明公开了一种小型起重机器人,包括轮毂电机、支撑腿、主动齿轮、腿部驱动电机、机架、起重气垫,所述轮毂电机、支撑腿、主动齿轮、腿部驱动电机分别安装于机架的四角,所述支撑腿的一端与所述轮毂电机连接,所述支撑腿的另一端与所述主动齿轮啮合,所述主动齿轮安装在所述腿部驱动电机的动力输出轴上,所述机架上安装有所述起重气垫。执行起重任务过程中,支撑腿平行于水平面放置,由外部向起重气垫供气,随着起重气垫内部气体压力的增加,其竖直方向上的高度逐渐提高,并大于轮毂电机的直径。此时,被支撑的对象在起重气垫的作用下抬起。
技术研发人员:王海鹏
受保护的技术使用者:江苏工程职业技术学院
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!